行人流场论
2014-10-30喻斌
喻 斌
(同济大学 交通运输工程学院,上海 201804)
行人流是交通流的重要组成部分.与汽车流不同,行人流没有车道的概念.不同于汽车流仅在路口处混合的情形,不同方向的行人流可以任意地混合.因而行人移动呈现出杂乱性和无规律性的特点,在路径选择上也更灵活或者说更智能.通常行人会对周边较大区域进行环境预评估并选择一条他认为能在未来一段时间导致最佳移动效果的路径.例如,在一定行人密度下,行人的跟随与自己移动方向相同或相近行人的行为就是这种智能的具体表现.这些特点导致传统的数学公式推导方法较难有效地分析行人流.
Gipps和Marksjo[1]在1985年提出一微观行人流模型.他们使用Benefit-Cost的方法决定行人下一步移动的具体方向和距离,采用类似推力(repulsive force)的概念考虑周边行人的影响,使用序列更新(sequence update)方式处理不同行人具有不同移动速度的情况.Lovas等[2-4]使用排队网络(queuing network)研究了行人流撤离并开发相应的软件EVACSIM.Hoogendoorn等[5-6]运用微积分提出将行人流比拟为气体分子运动的中观模型,并在单向和双向行人流情况下论证该模型可给出合理的结果.Helbing等[7-8]提出基于牛顿力学定律的社会力(social force)模型.此模型将周边环境(行人和障碍物)对行人的影响表述为引力和斥力,可以揭示行人流的一些特点,例如行人道自生成(automatic lane formation),近出口处振荡(oscillation around doors),加热凝固(freezing by heating)等等.丁青艳等[9]提出改进的社会力模型,并研究了轨道交通中的行人流.
当前最为常用的一类行人流模型是基于元胞自动机理论.元胞自动机模型本质上是离散数学模型,使用局域规则(local rules)决定细胞的下一个状态.因此,与传统的连续数学模型相比,在计算机上仿真时此类模型具有逻辑简单明了和运算速度快的优点.Nagel和Schreckenberg[10]首先将元胞自动机理论引入汽车流研究,提出NaSch模型.之后,诸多学者提出了多种基于元胞自动机理论的交通流模型,包括汽车流,行人流等[11-26].这些模型的主要区别在于所采用的具体局域规则.值得指出的是,由于传统的元胞自动机理论模型是基于局域规则,因此未必能有效描述周边环境对行人的远距作用或者说行人的智能.关于这方面,Burstedde等[17]进行了有益的尝试.借鉴昆虫学中的趋化效应(chemotaxis effect),他们引入地面场(floor field)动态地修改行人移动至相邻位置的转换率.
本文在Helbing和Burstedde等人的研究基础上直接使用矢量场概念系统地建立行人流理论,将行人的智能转化为由假想的场施加于行人所处位置的场强,可克服之前的行人流模型不能较好描述远距周边环境影响的缺点.
1 行人流的场论框架
为了描述复杂环境下的行人移动,采用场论的观点,即假设行人是在一个动态变化的场中移动.在某一时刻行人的下一个移动是由这一时刻该行人的预期移动和所处位置的行人场强共同决定.现实中行人会遇到各种不同的阻碍和吸引.例如,行人会主动地绕开比如柱子之类的固定障碍物.再者,两个相向行驶的行人通常视对方为临时障碍物,会采取或立于原地等对方绕过自己,或主动地改变移动方向以绕行.另外,许多学者都观察到在一定的行人流密度下行人具有跟随与自己移动方向相同或相近的行人的行为,这种行为导致了行人道的自生成.
1.1 行人引力场和行人斥力场
行人的实际移动受多种因素的影响,为了量化这些因素,假设行人场是一个由多个引力子和斥力子产生的引力场和斥力场叠加而成的混合动态场.其中,斥力场分为两种,全向斥力场(图1)和有向斥力场(图2).如无特殊说明,图中出现的字母R和A将分别代表斥力子与引力子.
全向斥力场场强只受距离影响.全向斥力场主要用于描述固定障碍物的影响,故全向斥力场是静态叠加的,不随时间变化.假设一全向斥力场中心位于(cx,cy)(图3),则该场在位置(x,y)的场强由公式(1)给出.

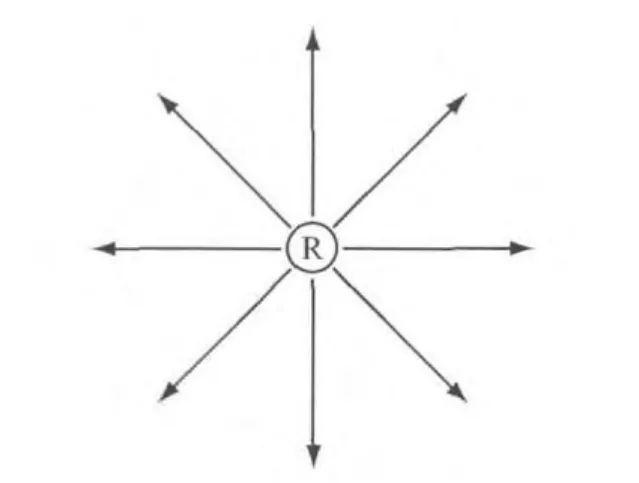
图1 全向斥力场Fig.1 Omni-directional repulsive field
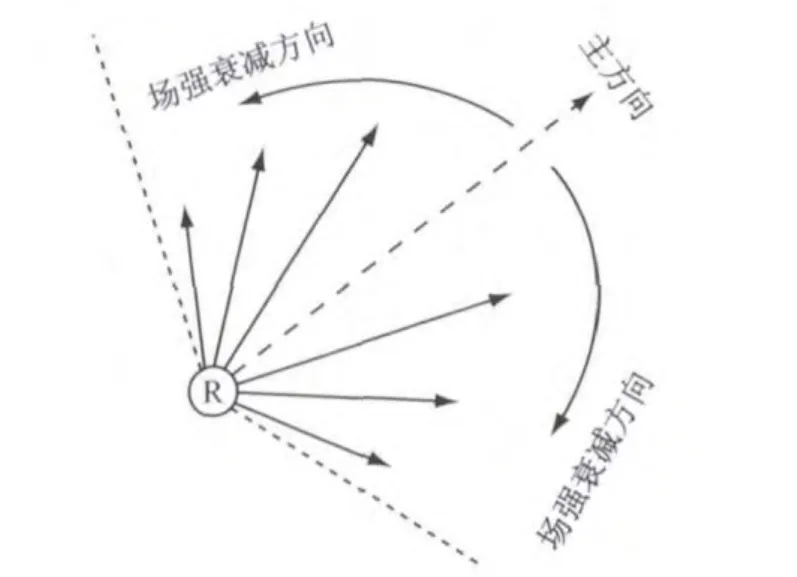
图2 有向斥力场Fig.2 Directional repulsive field
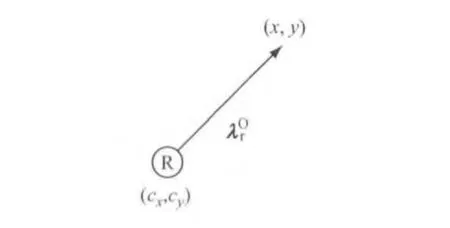
图3 全向斥力场强Fig.3 Omni-directional repulsive field strength
有向斥力场强同时与距离和方向有关,其大小随与主方向的偏离增大而减小.特别地,还假设该场强随时间而衰弱,衰弱因子定义为.由引力子产生的引力场主要为有向引力场(图4).与有向斥力场类似,有向引力场强同时与距离和方向有关,其大小随与主方向的偏离增大而减小,同时随时间而衰弱,衰弱因子定义为.引入有向斥力场和有向引力场主要为描述由于周围行人移动而产生的具有时效的影响.因此不同于全向斥力场,它们是动态叠加的.有向斥力场强主要作用于与该行人相向移动的行人,而有向引力场则主要作用于与该行人移动方向相似的行人.假定一行人在时间t从点(x,y)1移动至点(x,y)2,则该移动将产生一中心位于(x,y)1主方向为(x,y)1→(x,y)2的有向引力场和一中心位于(x,y)2主方向为(x,y)1→(x,y)2的有向斥力场(图5).除了需要考虑偏离角外,有向场强公式类似于公式(1).假定一中心位于(cx,cy)主方向为(cx,cy)→(px,py)的有向斥力场(图6),任意点(x,y)处的场强由公式(2)给出.

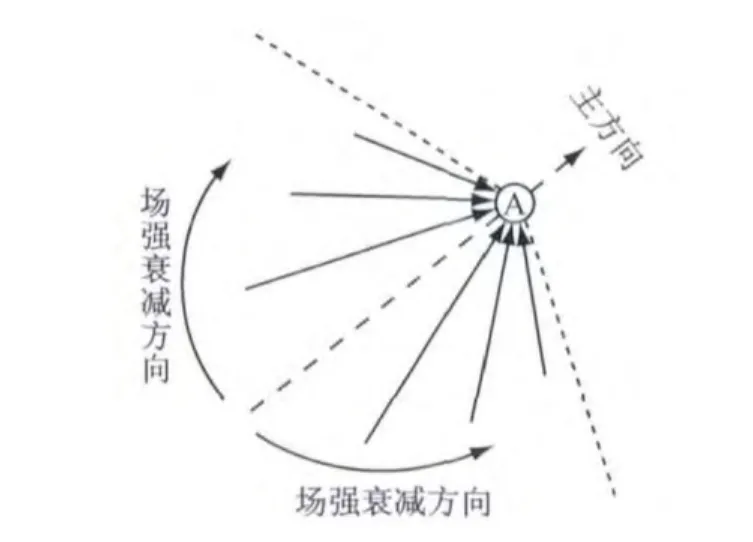
图4 有向引力场Fig.4 Directional attractive fields

图5 行人移动产生的有向场Fig.5 Directional fields caused by pedestrian move
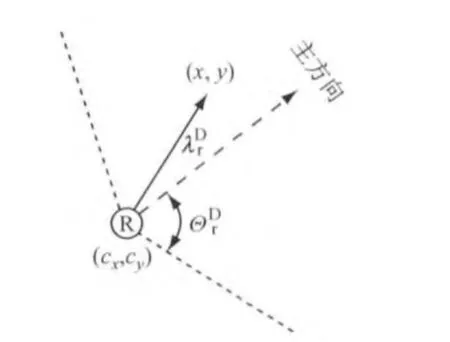
图6 有向斥力场强Fig.6 Directional repulsive field strength
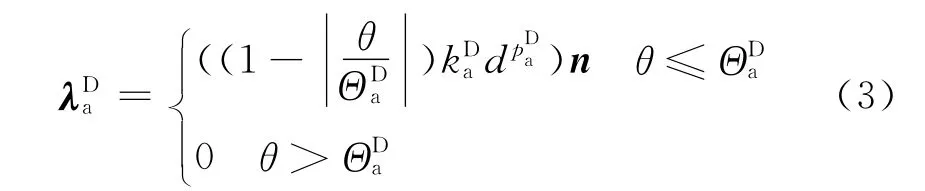

图7 有向引力场强Fig.7 Directional attractive field strength
1.2 行人场对行人移动的作用
引力子和斥力子的数目以及场强皆随时间动态变化.假设在时刻t,行人p位于位置(x,y),其期望移动方向为f.设此时共有n个斥力子和m个引力子,它们将在位置(x,y)产生n个斥力场强和m 个引力场强.为了避免错误的矢量叠加,进一步假设斥力场只与斥力场叠加,引力场与引力场叠加.由此,位于(x,y)的场强λ将由两部分构成.

式中:λr为n个斥力场强叠加生成的场强矢量;λa为m 个引力场强λ叠加生成的场强矢量.
则行人p的下一个移动方向Φ可表示为

再次,考虑到位于行人移动方向之后或两翼的阻碍或吸引对其移动并无明显影响的事实,可进一步简化公式(5).对于行人p,依据该行人的期望移动方向f将斥力场叠加矢量λr表达为由位于正部的斥力子产生的和位于负部的斥力子产生的的叠加.如将之前n个斥力场强重新排序使得前n′个场强矢量由处于正部的斥力子产生,后n-n′个场强矢量处于负部的斥力子产生,则有公式(6)(图8).

图8 斥力场强正负部分解图Fig.8 Positive and negative decomposition of repulsive field strength
同理,对于引力场叠加矢量λa进行类似处理,可得公式(7)(图9).


图9 引力场强正负部分解图Fig.9 Positive and negative decomposition of attractive field strength
据此,最终将公式(5)表述为

2 行人流现象的仿真演示及分析
为了检验该行人流场论架构的可行性,编写了局域规则使用假想行人场强的元胞自动机计算机程序.特别地,公式(8)采用的是基于概率的数学公式.仿真结果显示能够较好地再现诸多实际观测到的行人流现象,例如行人道的自生成,行人的靠右侧移动,出口处双向摆动等.
2.1 行人流的出口处双向摆动
行人流的出口处双向摆动现象发生在两股逆向行驶的行人流试图通过同一出口抵达对侧时.在一定的行人流密度下,会出现一段时间内一个方向的行人占据该出口并相继通过.而这将使得该方向的行人施加给在出口另一侧等待通过的另一方向行人的“压力”逐渐减弱.继而出现在接下来一段时间内,在出口另一侧另一方向的行人将占据该出口并相继通过.该现象体现了行人流较典型的集体合作行为和考虑远距周边环境影响的特点.
所使用的仿真场景具有40×30格子(40为行数,30为列数).同时进行了如下假设:行人的最大速度为1;同时有20个自上而下移动的行人和20个自下而上移动的行人企图通过位于格子(20,13)和格子(20,15)的门洞.为了保持上行和下行的行人数恒定,采取了封闭的边界条件,即上行行人抵达上边界后自动挪至下边界重新开始和下行行人抵达下边界后自动挪至上边界重新开始.为了方便识别,以实心箭头表示上行行人,空心箭头表示下行行人,如图10所示.记录下每一个仿真时刻上半区的下行行人数和下半区的上行行人数,并据此绘出上行和下行行人数随时间变化的曲线.图11显示了仿真时刻3000至3180的上行和下行行人数的变化,显示了非常明显的摆动现象.
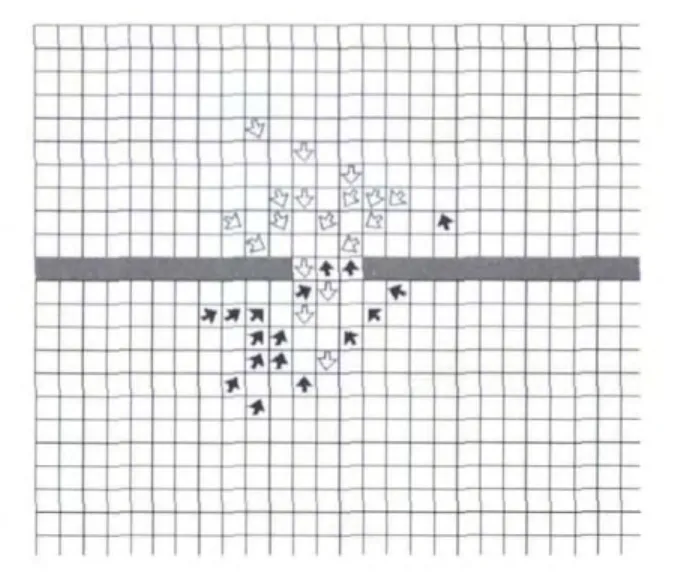
图10 出口处双向摆动仿真截图Fig.10 Simulation screenshot for oscillation around outlet
在时刻3010至3075,上半区的下行行人在该出口处占据了主导地位,陆续通过该出口,从而导致上半区的下行行人数不断减少.随着出口处的下行行人不断减少,位于出口处下侧的上行行人逐渐占据主导地位,并最终在时刻3075开始陆续通过该出口直至时刻3110左右结束.之后位于出口处的上行和下行行人群将再次处于动态平衡状态,相互推挤直至下一个摆动的到来.需注意的是,时刻3075到3140的上半区下行行人数增加和时刻3110到3170的下半区上行行人数增加只是由于采取封闭的边界条件的原故.
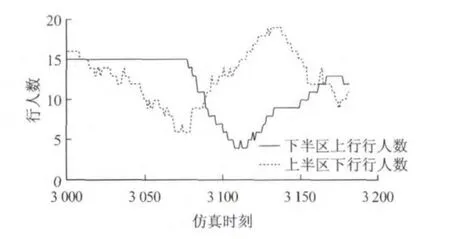
图11 上行和下行行人数时间变化图Fig.11 Number of upward &downward pedestrians vs time
2.2 行人的靠右行驶
在行人密度不大的情形下,我国和一些国家的行人有靠右侧行驶的习惯.这会导致上行和下行行人群较明显地分为左右两部分.为了在仿真中再现此现象,适当地提高模型中行人向右侧摆动的概率.图12是仿真截图,非常明显地显示了由于行人靠右行驶而产生的人群分离现象.
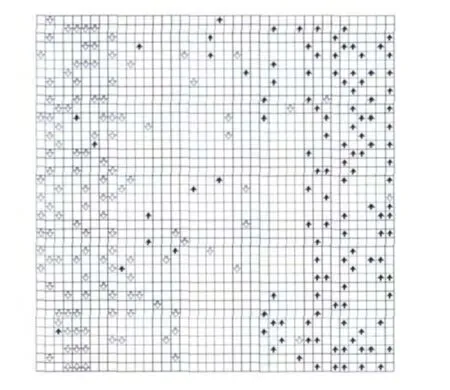
图12 行人靠右行驶仿真截图Fig.12 Simulation screenshot for pedestrians’implicit right side moving
2.3 行人道的自生成
行人另一个经常观测到的现象是行人道的自生成.在一定行驶环境下,由于相向行人之间的相互推挤和行人的跟随方向相近行人的特点,使行人流会依据移动方向自动地形成多条行人道.行人道的自生成是行人智能的具体体现,现有行人流模型较难重现该现象.在已有文献中,只有 Helbing[7]和Burstedde[17]尝试在各自的模型中再现行人道的自生成.然而,直观地比较三者之后,本文的结果是三者中较贴近实际情况的.图13为一仿真截图.
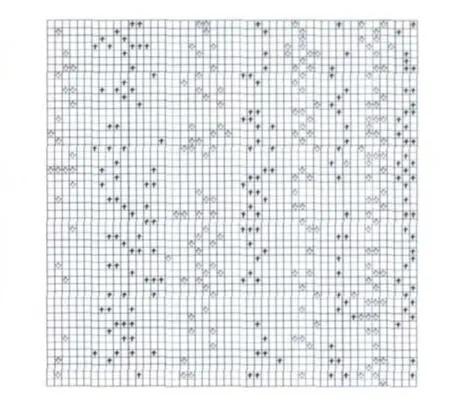
图13 行人道自生成仿真截图Fig.13 Simulation screenshot for pedestrians automatic lane formation
3 结语
本文使用场论建立行人流框架,将行人在路径选择中展现的主动智能描述为由假想的行人场施加于行人所处位置的场强,如此便可在行人流模型中定量地考虑行人的智能.结果显示,许多行人流现象,如出口处双向摆动、靠右行驶产生的人群分离、行人道的自生成等,皆可在仿真层面得以重现.这也从一个侧面论证了使用场描述行人流的可行性和有效性.
[1]Gipps G P,Marksjo B.A micro-simulation model for pdestrian flows[J].Mathematics and Computers in Simulation,1985,27:95.
[2]Lovas G G,Wiklund J,Drager K H.Evacuation models and objectives[C]//Proceedings of the International Emergency Management and Engineering Conference.Arlington:The Society for Computer Simulation,1993:101-108.
[3]Lovas G G.On performance measure for evacuation systems[J].European Journal of Operational Research,1994,85(2):352.
[4]Lovas G G.Modeling and simulation of pedestrian traffic flow[J].Transportation Research B,1994,28(6):429.
[5]Hoogendoorn S P,Bovy P H L.Gas-kinetic modeling and simulation of pedestrian flows [C]//79thTransportation Research Board Annual Meeting.Washington D C:TRB,2000,1710:28-36.
[6]Winnie D,Hoogendoorn S P,Bovy P H L.First-order pedestrian traffic flow theor[C]//84thTransportation Research Board Annual Meeting.Washington D C:TRB,2005,1934:43-52.
[7]Helbing D,Molnar P.Social force model for pedestrian dynamics[J].Physical Review E,1995,51:4282.
[8]Helbing D,Illes J F,Tamas V.Freezing by heating in a driven mesoscopic system[J].Physical Review Letters,2000,84,1240.
[9]丁青艳,王喜富,单庆超,等.轨道交通行人流运动建模及仿真[J].交通运输系统工程与信息,2011,11(5):99.DING Qingyan,WANG Xifu,SHAN Qingchao,et al.Modeling and simulation of rail transit pedestrian flow[J].Journal of Transportation Systems Engineering and Information Technology,2011,11(5):99.
[10]Nagel K,Schreckenberg M.A cellular automata model for freeway traffic[J].Journal of Physique,1992,2:2221.
[11]Blue V J,Adler J L.Emergent fundamental pedestrian flows from cellular automata microsimulation[J].Transportation Research Record,1998,1644:29.
[12]Blue V J,Adler J L.Cellular automata microsimulation of bidirectional pedestrian flows[J]. Transportation Research Record,1999,1678:135.
[13]Blue V J,Adler J L.Bi-directional emergent fundamental pedestrian flows from cellular automata microsimulation[C]//Proceedings on the 14thInternational Symposium on Transportation and Traffic Theory.Terusalem:Transportation Research Institute,1999:233-254.
[14]Blue V J,Adler J L.Modeling four-directional pedestrian flows[J].Transportation Research Record,1999,1710:20.
[15]Masakuni Muramatsu, Tunemasa Irie, Takashi Nagatani.Jamming transition in pedestrian counter flow[J].Physica A,1999,267(3/4):487.
[16]Masakuni Muramatsu,Takashi Nagatani.Jamming transition in two-dimensional pedestrian traffic[J].Physica A,2000,275(1/2):281.
[17]Burstedde C,Klauck K,Schadschneider A,et al.Simulation of pedestrian dynamics using a two-dimensional cellular automata[J].Physica A,2001,295(3/4):507.
[18]Blue V J,Adler J L.Cellular automata microsimulation for modeling bi-directional pedestrian walkways[J].Transportation Research Part B,2001,35(3):293.
[19]FANG Weifeng,YANG Lizhong,FAN Weicheng.Simulation of bi-direction pedestrian movement using a cellular automata model[J].Physica A,2003,321(3/4):633.
[20]LI Jian,YANG Lizhong,ZHAN Daoliang.Simulation of bidirection pedestrian movement in corridor[J].Physica A,2005,354:619.
[21]Weng W G,Chen T,Yuan H Y,et al.Cellular automaton simulation of pedestrian counter flow with different walk velocities[J].Physica Review E,2006,74(3):036102.
[22]Kazuhiro Yamamoto,Satoshi Kokubo,Katsuhiro Nishinari.Simulation for pedestrian dynamics by real-coded cellular automata[J].Physica A,2007,379(2):654.
[23]YUE Hao,SHAO Chunfu, YAO Zhisheng. Study on pedestrian evacuation flow based on cellular automata[J].Acta Physica Sinica,2009,58(7):4523.
[24]YUE Hao,GUAN Hongzhi,ZHANG Juan,et al.Study on bi-direction pedestrian flow using cellular automata simulation[J].Physica A,2010,389(3):527.
[25]孙泽,贾斌,李新刚.基于元胞自动机的行人和机动车相互干扰机理研究[J].物理学报,2012,61(10):84.SUN Ze,JIA Bin,LI Xingang.The study of the interference between pedestrians and vehicles based on cellular automaton model[J].Acta Physica Sinica,2012,61(10):84.
[26]杨立中,李健,赵道亮,等.基于个体行为的人员疏散微观离散模型[J].中国科学:E辑,2004,34(11):1264.YANG Lizhong,LI Jian,ZHAO Daoliang,et al.Miscroscopic discrete evacuation model based on individual behavior[J].Science in China,Series E:Engineering & Materials Science,2004,34(11):1264.
