高职实训教学用智能小车设计
2014-10-27卢贶宋霞
卢 贶 宋 霞
(1.武汉软件工程职业学院,湖北武汉 430205;2.武汉职业技术学院,湖北武汉 430074)
高职院校的电气控制、自动原理、单片机原理、嵌入式系统等课程的实训教学中,经常用到智能小车作为教学的案例和平台。智能小车以其生动、典型、学习形式喜闻乐见、涉及知识面广等特点,受到教师和学生的欢迎。本文介绍基于STC单片机的智能小车,该小车主要由主控制器、车体、驱动电机、避障电路、寻迹电路和辅助电路等组成,各部分均采用节能设计,整机功耗低[1]。
1 硬件设计
1.1 主控制器介绍
本设计采用STC12C5A60S2单片机作为主控制器,该单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但指令运行速度快。内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S),适合电机控制和强干扰场合。其片内程序存储器为FLASH工艺,容量为60K,片上还集成有1280字节的RAM。单片机内部结构还包括SPI接口、定时/计数器、PCA、UART接口、I/O口、看门狗及片内R/C振荡器和外部晶振电路等模块。
本设计的主要外围电路模块有:避障检测电路、寻迹检测电路、电机控制电路等,具体的硬件电路结构框图如图1所示。

图1 硬件电路结构框图
1.2 寻迹检测电路
智能小车的运行轨迹是沿着白底上黑线运动,因此设计的寻迹检测电路即是黑白色识别器,采用的是红外发射、接收对管组成的光电传感器模块。采用红外发射管代替可见光管,可以降低背景光干扰。光电管接收反射的红外信号,红外发射接收原理如图2所示。

图2 红外发射接收原理
寻迹检测电路工作原理是,发射管激励电信号,发射管发出的光强基本恒定,而白底和黑线对光的发射效果不同,接收管表现的吸收效果就不同,使接收管反向电流有较大变化,导致与其串联的电阻两端电压出现明显变化。将该电压接于单片机的A/D转换输入端,经片内A/D转换器后变成数字量,将黑白两状态变为灰度识别,优点是电路简单,识别分辨率高[3]。一路的寻迹检测电路如图3所示。
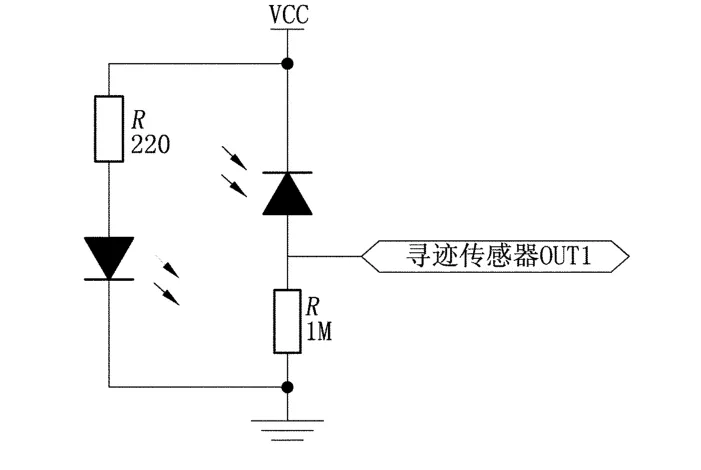
图3 寻迹检测电路
实际使用中将三个一路寻迹检测电路安装在一起,之间的间隔约为黑线的宽度,输出的信号为寻迹传感器OUT1、OUT2、OUT3,从而达到最佳的寻迹效果。
1.3 电机控制电路
电机控制电路一般采用H桥式驱动电路,由于两个电机是独立控制,所以需要两路H桥式驱动电路,如图4所示。
控制电机的 MOTOR1A、MOTOR1B、MOTOR2A、MOTOR2B四路信号,以及为电机调速的控制端口SPEED1、SPEED2两路信号,都与单片机的I/O端口相连,受单片机程序控制。
MOTOR1A和MOTOR1B控制一个H桥,该H桥输出J3接左轮电机,所以MOTOR1A、MOTOR1B控制左侧小车电机的前进和后退;MOTOR2A和MOTOR2B控制另一个H桥,该H桥输出J5接右轮电机,所以MOTOR2A、MOTOR2B控制右侧小车电机的前进和后退。改变这四路控制信号就可以让小车完成左转、右转、前进、后退、原地转圈等。
为了方便控制小车的运行速度和车轮的差动,设计了电机调速电路,实现了DAC模拟电压控制调速和PWM调速两种方式[4]。
DAC模拟电压控制调速。以MOTOR1电路为例说明,当J4断开时,改变三极管Q7基极的电压,即改变SPEED1输入电压,就能改变三极管Q7的发射极电流,达到改变电机转速的目的。通过DAC控制SPEED1的电压变化,来实现电机的无极调速。
PWM调速控制。如果SPEED1是高电平,Q7就出现导通状态,电机工作;如果是低电平,Q7截止,电机也停止工作,通过改变PWM占空比就可以起到电机调速的效果。以上两种调速方法控制效果基本一致,如果不需要调速,可以用短路帽将J4和J5端口短接。
1.4 避障模块
智能小车通过红外传感器采集路况信息,通过对检测信息的分析,自动控制转向电机,改变行驶路径,绕过障碍物,从而实现避障功能。
红外传感器的工作原理是根据投光器(红外发光二极管)发出的光束,被障碍物遮挡或部分反射,受光器(红外光敏二极管)根据情况作出判断反应,利用被检测物体对红外光束的遮光或反射,由同步回路选通而检测物体的有无,其物体不限于金属,对所有能反射光线的物体均能检测。本设计中采用红外传感器为NPN常开型反射式传感器,工作电压为5V,工作电流100mA。有效测量距离为80cm,易于装配。该传感器为开关量传感器,输出的为1、0开关量信号,和单片机的INT1端直接连接,当无障碍物时,输出高电平;当有障碍物时,输出低电平,触发中断,小车随即做出避障动作,避免碰到障碍物。
1.5 智能小车结构
智能小车设计了两个驱动轮和一个万向轮的三轮结构。左、右轮独立控制,可以使小车同时前转、后转,反向旋转或一侧转动一侧停止,可以完成原地转弯,旋转等动作。同时选择橡胶轮,摩擦力大,避免了小车打滑现象。由于小车可以灵活地进行原地转圈控制,适合沿曲折路线前进,在走迷宫等应用时有很强的优势。智能小车采用材质为FR-4的电路板作为车体,该电路版上尽可能多地留出了可以焊接器件的焊孔,学生可以直接把显示电路、通信电路、遥控电路等扩展部分焊接到车体上,不需要再额外增加电路板,方面使用。
选用直流减速电机,该种电机体积小,装配方便,使用简单,重量轻。由于其内部由高速电动机提供原始动力,带动减速齿轮组,可以产生很大的扭力。选用的直流电机减速比为48:1,减速后电机的转速为120r/min,车轮直径为7.2cm,因此小车的最大速度可达0.452m/s。
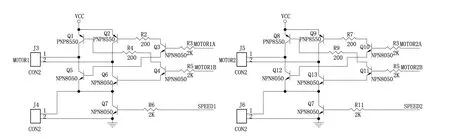
图4 电机控制电路图
2 软件设计
2.1 主程序框图
软件设计采用模块化的编程思想,使用Keil4软件开发平台编写、调试软件[5],主程序框图见图5。

图5 主程序框图
2.2 寻迹程序设计
智能小车进入寻迹状态后,即开始不停地扫描与寻迹检测电路相连接的单片机I/O口,一旦检测到某个I/O口有信号,即进入判断处理程序,先确定寻迹检测电路中的三路信号中哪一路检测到黑线,如果左边传感器探测到黑线,即小车左半部分压到黑线,车身向右偏出了轨迹,此时应使小车向左转;如果右边传感器探测到黑线,即车身右半部压住黑线,小车向左偏出了轨迹,则应使小车向右转。在经过方向调整后,小车再继续向前行走,并继续探测黑线,并重复上述检测动作。寻迹程序框图如图6所示。
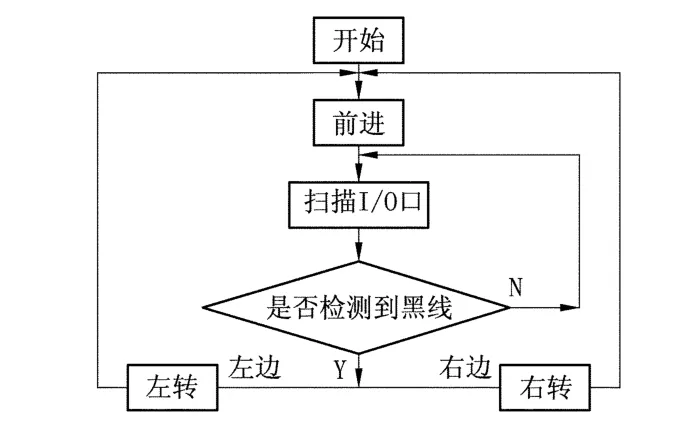
图6 寻迹程序框图
2.3 避障程序设计
智能小车在运行过程中,如果检测到运行前方出现了障碍物,需要能灵活躲避,避开障碍物后,再回到寻迹检测状态。避障程序框图如图7所示。

图7 避障程序框图
3 结 语
本文介绍了基于STC单片机智能小车的硬件和软件设计,由于采用模块化设计思想,可以扩展许多功能。本设计经过安装、调试,实现了智能小车的避障、调速、前进、后退、左转、右转、寻迹等功能。
(1)自动沿白底黑线轨迹行驶小车,在行驶过程中,能够自动检测预先设好的黑线轨道,实现直道和弧形轨道的前进。若有偏离,能够自动纠正,返回到预设轨道上。
(2)当小车探测到前进方向的障碍物时,能自动避开障碍物,从无障碍区通过。小车通过障碍区后,能够回到自动寻迹状态。
1 田拓.基于AT89C51单片机智能小车的设计[J].宁夏工程技术,2005(4):334-336
2 赵振德.多功能遥控智能小车的制作[J].电子制作,2011(4):12-16
3 王庆有.光电传感器应用技术[M].北京:机械工业出版社,2008:58-71
4 曹卫华.一种寻线行走机器人设计与实现[J].计算机测量与控制,2006(14):4-6
5 黄智伟.全国大学生电子设计竞赛系统设计[M].北京:北京航空航天大学出版社,2009:91-112
