磁悬浮列车悬浮高度控制技术的研究
2014-10-27李森
李 森
(上海出版印刷高等专科学校,上海 200093)
0 引言
悬浮控制技术是磁浮列车的核心和关键技术之一,悬浮控制系统性能的好坏将直接影响到磁浮列车的稳定性、安全性和舒适性。磁悬浮列车控制的一个最基本要求是要保证磁浮列车能够在一定程度的各种扰动作用下具有平衡稳定的悬浮。作用在磁悬浮系统的外部扰动主要包括负载变化、驱动加速力和减速力、空气动力及轨道的弯度、坡道和不平整带来的扰动力;内部扰动力则主要起因于控制系统本身的非线性和传感器的测量误差等因素。磁浮列车在控制系统设计时应考虑和解决这些因素。
本文运用计算机控制系统来解决这一问题,它的优点是:
(1)运算速度快、精度高、具有极丰富的逻辑判断功能和大容量的存储能力,容易实现复杂的控制规律,极大地提高系统性能。
(2)功能/价格比高。
(3)控制算法由软件程序实现,适应性强、灵活性高。
(4)可使用各种数字部件,从而提高系统测量灵敏度,并可利用数字通信来传输信息。
(5)使控制与管理更易结合,并实现更高层次的自动化。
(6)实现自动检测和故障诊断较为方便,故提高了系统的可靠性和容错及维修能力。
1 实例介绍
自动化的磁悬浮列车可以在极短的时间内正常运行,而且具有极高的速度和能量利用率。自动化磁悬浮列车的一个关键技术就是对列车的悬浮高度进行控制。德国M-Bahn号磁悬浮列车悬浮高度的计算机控制系统代表世界先进水平。
1.1 建立高度控制的数学模型
若采样周期 T=0.01 s,试在w'域设计数字控制器D(z),使系统的相位裕度满足45°≤γ≤55°,并估算校正后的系统阶跃响应。
1.2 实例验证数学模型
把被控对象离散化可得:

采用MATLAB命令:

得到运行结果为:

要想判断系统是否处于稳定状态,需要判断系统特征方程的特征根,根据特征根与单位圆的关系,可以粗略判断系统的稳定性。
特征方程根为:

分析:因为有根是在单位圆以外,所以原系统不是稳定的。
将其变换至 w'平面,若,T=0.01 s,则可以采用MATLAB软件中突斯丁反变换指令,将其由Z平面变换至w'平面:

运行结果为:

采用MATLAB命令:
figure(1);margin(Gnum,Gdes),grid ,hold on%连续系统在S平面。
margin(Gwnum,Gwdes)%原连续系统在W平面可以得到该模型的输出伯德图如图1所示,所设计的校正系统如图2所示,校正后的系统阶跃响应如图3所示。
画出对象模型的几种频率特性曲线如图4所示。
从图4中可以看出,在频率小于50 rad/s时,3种曲线对应的相角几乎相等,不需要进行相角的修正。
2 Mathmatica中的仿真
前面采用传递函数的方法进行仿真和分析,通过matlab等软件对磁悬浮列车的高度控制进行仿真,下面用状态空间的方法对磁悬浮列车的高度控制进行分析。
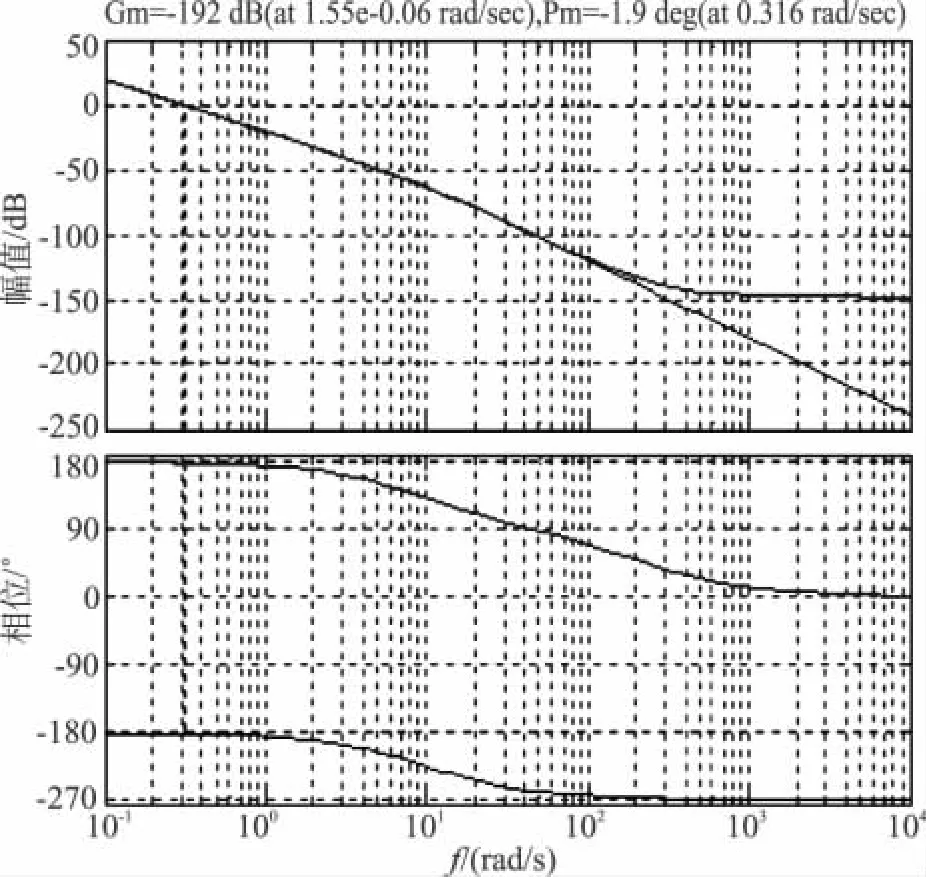
图1 仿真伯德图

图2 matlab控制系统结构图

图3 matlab阶跃响应仿真结果

首先,传递函数转化为状态空间形式,然后把状态变量离散化。
原传递函数的空间状态矩阵为:

运用matlab把连续的状态矩阵转换为离散的状态矩阵:


图4 仿真结果图

运用mathmatica判断系统的可控性和可观性,如图5所示。
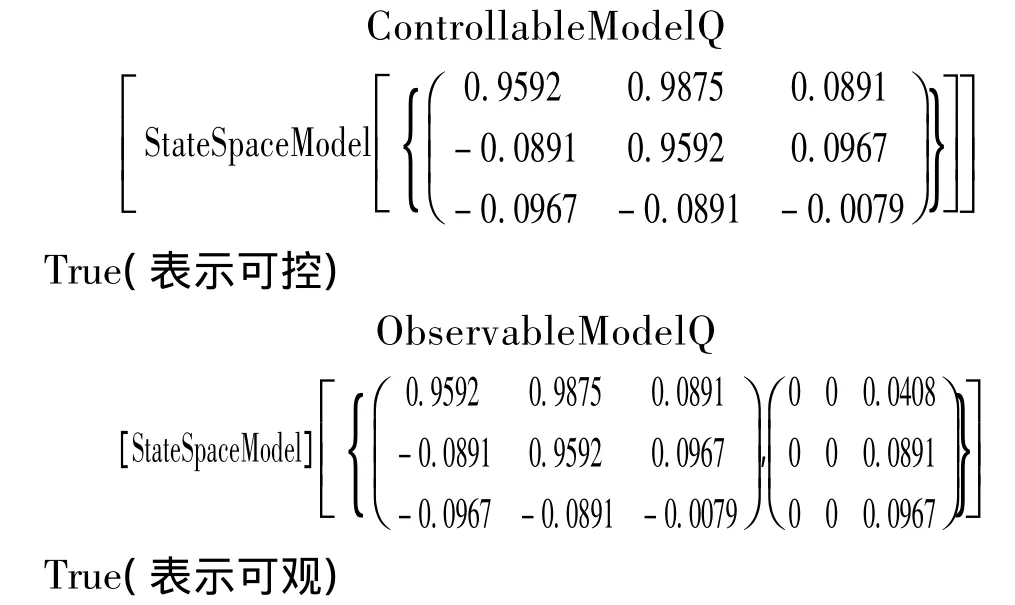

图5 mathmatica控制系统结构
计算系统的增益矩阵:

得到的增益矩阵:

3 实验总结
微机控制系统设计虽然随控制对象、设备种类、控制方式、规模大小等不同而有所差异,但系统设计的基本内容和主要步骤是大体相同的。主要包括:
(1)系统总体控制方案设计;
(2)系统硬件设计、选择与开发;
(3)软硬件的可靠性设计;
(4)确定满足一定经济指标的目标函数,建立被控对象的数学模型并针对目标函数进行控制算法规律设计;
(5)软件设计与开发;
(6)系统整体调试等。
通过MATLAB软件,容易检验输出的稳定性,得到实验结果,通过图像可以看出输出曲线的超调量、稳定时间、调节时间等,从而进行分析。
(1)采用两个微分环节抵消积分环节,所以系统响应存在静态误差。
(2)设计中没有考虑w'平面与s平面在频率和相角之间存在的非线性映射关系,得到的相角裕度是在w'平面的,而不是在z平面的,所以可能需要进行一定的修正。
(3)采用1个微分环节抵消积分环节,所以系统响应不存在静态误差。
(4)穿越频率 5.69 rad/s比较小,相角裕度为47°,所以得到的相角裕度不需要进行修正。
控制系统动力稳定性分析方面,主要根据系统动力特性的数值研究、数值仿真结果,得出系统受控稳定情况下的控制参数。现实中要考虑各个非理想的因素,设计的控制器以及各变量会影响实际运行结果,而本设计只在实验室中进行仿真,只考虑最主要的几个因素进行控制,设计的控制器比较理想。
[1]BrezezinaW ,Langerhols J.Lift and side forces on rectangular pole pieces in two dimensions[J].Journal of Applied physics,1974 ,45(4):1868-1872.
[2]谢云德,常文森.电磁型磁浮列车单铁力的计算及运动稳定性和可控性研究[J].铁道学报,1995,16(1):41-48
[3]Masada E.Development of Maglev Transportation in Japan:Present State and FU TURE Prospects[ A ].Maglev'93[C].Argonne:Argonne National laboratory,May 1993.
[4]Seki,Tomohiro.The Development of HSST21001.Engineer2 ing Development[C].Tokyo.Japan:HSST Develoopment Corporation,Chiyoda2ku,1995.
[5]Matsumoto A.Vehicle Dynamics and Riding Quality of a Maglev2Type Urban Transportaion System CHSST2100[C].The International Conference on Speed Up Rechnology for Tailway and Maglev Vehicels.Yokohama:J SME ,Nov.1993.
[6]尹力明.磁悬浮转向架的动力学关系及部件强度的计算方法[J].机车电传动,1997,(5):7-10.
[7]Yoshioka H.山梨磁悬浮试验线车辆ML X01的动力学性能[J].国外铁道车辆,2000 ,37(5):27-32
[8]Yoshioka H ,Watanabe K.Dynamic characteristics of side2 wall magnetically2levitated vehicles[C].Proceedings of the international Conference on Speedup Technology for Railway and Maglev Vehicles.1993:103-108.
[9]Yoshioka H,Suzuki E,Seino HE,Azakami M ,Oshima H ,Nakanishi T.Results of running tests and characteristics of the dynamics of the ML X01 Yamanashi Maglev Test Line ve2 hicles[C].Proceedings of the 15th international Conferences on MA GL EV'98.1998:25-230.
[10]Hiroshi Yoshioka,Erimitsu Suzuki,Hiroshi Seino et al.Characteristics of the Dynamics of the ML X01 Yamanashi Maglev Test Line Vehicles[J].Quarterly Report of RTRI ,1998,39(2):35-38.
[11]赵志苏,尹力明,罗 昆.磁悬浮列车转向机构运动分析与设计[J].机车电传动,2000,(6):11-13.
