运动目标去除阴影的跟踪
2014-10-21陈云彪郑贤超
陈云彪 郑贤超

【摘要】运动目标的影子会降低视频监控的性能,本文提出了一个提高目标跟踪精确率的去影算法。该算法由四部分组成:建立一个实时性很强自动更新的背景模型,提取运动目标区域,消除运动目标的影子,最后对已去影的运动目标进行检测和跟踪。实验结果表明我们的算法在處理目标去影跟踪上有着良好的性能,能在一定的程度上解决运动目标的遮挡问题,并去除目标自的阴影,提高了运动目标跟踪的鲁棒性。
【关键词】背景建模;阴影去除;灰度直方图;背景相差;跟踪
1.引言
在日新月异的计算机视觉技术发展中,行人定位变得越来越重要,尤其在智能视频监控领域。智能视频系统可以迅速从原始视频帧中提取有用信息,同时它不仅解决了单一对象的细节检测,还增强了运动目标去影检测跟踪的鲁棒性[1]。运动目标的跟踪意味着要准确检测其在视频序列中的位置和形状。运动的目标和其他静止目标都会在强光下产生影子,因此运动目标的其中一个跟踪难度就是去除阴影的影响,不然就会降低跟踪精度。
在视频系列中对运动目标的阴影去除分为基于模型和基于属性特征[2]。基于模型的有较大的局限性,是依据统计信息对特定场景的处理,需要事先知道场景分布,光照不同等先验信息,所以难度较大可行性较小。基于属性的方法则是对颜色、亮度等方面的属性来检测阴影[3]。阴影有和运动目标相同的速度,本文提出了一个多个运动目标跟踪的监控系统。背景由一个固定的摄像机拍摄,我们的目标是从拍摄的视频序列信息中实现精确跟踪。该算法基于灰度直方图空间来消除目标阴影并且对运动目标进行检测跟踪。在灰度直方图空间中,根据运动物体和阴影之间像素值的不同可以将前景像素分为阴影和非阴影部分,用这种方式我们可以消除每一个阴影。在静态背景下,我们使用了背景消除的方法去提取运动目标区域,同时基于灰度直方图空间去除阴影,最后在去影后的运动目标区域对运动目标较为准确的跟踪。
2.提取运动目标
我们运用高斯函数对背景模型进行更新,并运用背景相差法提取运动目标。背景图像每个像素可以用K个高斯函数来表示,如下所示:
(1)
式中,K是混合高斯模型中高斯分布的个数,一般取3~5,Xt是在t时刻由红、绿和蓝色构成的像素值,表示在时刻t时刻的高斯分布的权系数估计值,和分别是均值向量和协方差矩阵,为高斯函数的密度函数。
(2)
(3)
(4)
通过高斯建模法背立后背景模型并更新后运用背景相差法来提取运动目标。背景相差法是摄像头固定即背景静止下运动目标提取的一种思路,建立背景模型下,当前帧差与背景图像的差分图像便是需要的运动目标。由此可知运动目标为:
(5)
式中I(x,y,t)为当前图像,b(x,y,t)为背景图像,n(x,y,t)为噪声部分,这样再依据阈值分割原理的判断原则得到运动目标图像,如下:
(6)
式中T为阈值。
3.灰度直方图中阴影去除
在视频系列中阴影去除的方法众多,不少学者提出了运用色度和饱和度在阴影区域和非阴影区域的微小变化消除阴影[4]。也有学者在HSV空间根据颜色属性设定相应的阈值去除阴影[5]。但是当场景发生变化或有噪声引入时,在HSV空间检测到的阴影区域和运动目标的区域接近,去除的结果也是不可靠的。我们根据前人的工作[6,7],我们运用了再灰度直方图中去除阴影,这种方法消耗内存少,计算准确能更好的去除阴影。
在灰度直方图中,阴影区域可以被映射到灰度直方图中的像素空间中,在像素空间,可以显示阴影区域和非阴影区域的灰度信息,在灰度直方图中能有效的去除噪声的影响。算法步骤如下:
1)把提取的运动目标图像转化灰度图像。据此,根据真彩图像转换为灰度图像的原理,再对图像进行灰度统计,计算灰度直方图的函数如下:
(7)
其中:
K{0,1,2,…,L-2},,H(k)为在图像中出现的频率,K为灰度值数,根据文献[8],灰度直方图中的函数定义为:
(8)
式中
K{0,1,2,…,L-2},L为灰度等级。
2)依据灰度直方图中的函数计算直方图势函数,进而计算直方图势函数pH(k)的一阶差分:p(k)=pH(k+1)-pH(k)
K{0,1,2,…,L-2}
3)p(k)第一个由负到正的拐点,即为灰度直方图中的第一个极小值,对应的灰度值为为灰度分割阈值T。
4)根据以上式子,把提取出的运动目标进行阈值侵害,得到ft(x,y),式子如下:
(10)
在灰度直方图中,阴影的灰度等级比提取的目标要低,灰度图中的峰值和峰谷是不同的,根据灰度直方图第的第一个波峰波谷的特性,在分析了灰度值方图的峰谷后,我们选第一波谷作为检测阴影的阈值[9],进行阈值分割后,得到的提取出的运动图像便是去除阴影后的跟踪图像。
4.实验结果
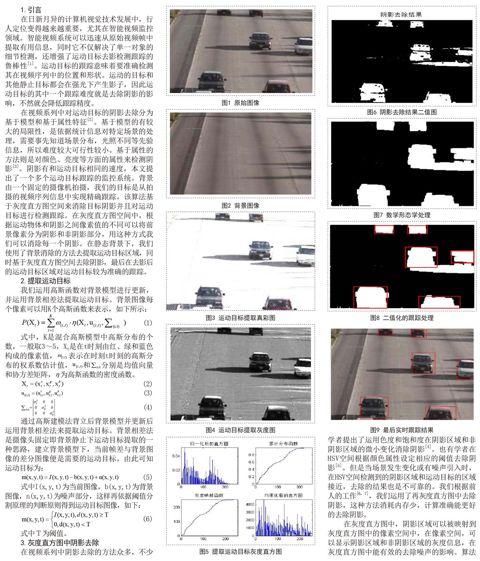
如图1-4所示,我们选取了高速公路的测试场景,在这个场景中,运动目标多个,太阳较强,影子强烈,如果不进行去除阴影,目标的跟踪会受到极大的影响。
提取运动目标的灰度图通过算法生成归一化的直方图,因为有部分噪声的干扰,因此,我们在运用均衡化的直方图(如图5所示)处理,根据波峰波谷的特性设定阈值并且在直方图空间中去除阴影。
如图6-9所示,我们的算法可以比较好的建立背景模型并进行更新,提取出的运动目标也更为准确,并且也包含阴影,在灰度直方图中,灰度势函数呈多峰多谷的分布,根据直方图的峰值特性,自动设定阈值后可以比较好的去除目标阴影如图6所示,但是去除阴影后还会包含有空洞,所以我们还进行了数学形态学的处理进行膨胀和腐蚀,处理后的结果如图7所示,最后在进行目标实时跟踪,因为比较好的去除阴影,所以跟踪结果也可以比较精确无阴影的干扰。
5.总结
本文主要是运用了高斯函数来进行背景建模并实时的进行背景更新,背景相差来提取运动目标,并在灰度直方图空间中对提取的运动目标进行阴影直方图的统计,根据直方图的特性,运用一阶差分法选取了适当的阈值分割点。我们对实验进行测试表明,该算法可以有效的去除光照变化,物体移动,场景微调等噪声的影响,建立较为准确的背景模型,能够完成灰度直方图中阈值的分割及选取,对阴影进行检测并去除,并对最后的运动目标进行跟踪,我们的算法可以快速有效的实现。相对其它算法,我们的算法在准确率及速率上有所提高,可以比较好的运用在智能监控中。我们的算法可以有效的去除运动目标的噪声干扰,未来的主要工作放在运动目标提取中的图像分割上,消除阴影对前景信息的影响,并且比较好的解决运动目标的其它物体遮挡问题。
参考文献
[1]Leone A,Distante C,Buccolieri F.A shadow elimination approach in video-surveillance context[J].Pattern Recognition Letters,2006,27(5):345-355.
[2]于东方,殷建平,张国敏.一种基于灰度直方图的遥感影像阴影自动检测方法[J].计算机工程与科学,2008,30 (12):43-44.
[3]吴亮.运动目标提取,阴影和鬼影检测及去除算法研究[D].国防科学技术大学,2007.
[4]Zhou Y,Sun L,Zhang J.A shadow elimination method based on color and texture[C].IEEE,2010.
[5]Liu Y,Bin Z.The improved moving object detection and shadow removing algorithms for video surveillance[C].IEEE,2010.
[6]Cheng H D,Chen Y H,Jiang X H.Thresholding using two-dimensional histogram and fuzzy entropy principle.[J].IEEE transactions on image processing:a publication of the IEEE Signal Processing Society,1999,9(4):732-735.
[7]Ye J,Gao T,Zhang J.Moving object detection with background subtraction and shadow removal[C].IEEE,2012.
[8]裴繼红,谢维信.势函数聚类自适应多阈值图像分割[J].1999.
[9]Wu M,Lin C,Chang C.Brain tumor detection using color-based k-means clustering segmentation[C].IEEE,2007.
