主动前轮转向的操纵稳定性研究
2014-10-13陈升鹏冯能莲汤杰张杨石盛奇潘阳
陈升鹏,冯能莲,,汤杰,张杨,石盛奇,潘阳
(1.安徽农业大学 工学院,安徽 合肥230036;2.北京工业大学 环境与能源工程学院,北京100022)
主动前轮转向的操纵稳定性研究
陈升鹏1,冯能莲1,2,汤杰1,张杨1,石盛奇1,潘阳2
(1.安徽农业大学 工学院,安徽 合肥230036;2.北京工业大学 环境与能源工程学院,北京100022)
汽车的主动前轮转向作为汽车主动控制的一个重要组成部分,可以改善车辆的操纵稳定性;横摆角速度与质心侧偏角作为表征车辆操纵稳定性的2个主要指标,可以作为车辆处于稳定状态的参考。基于模型预测控制方法,在汽车线性二自由度模型的基础上,使用相同工况下理想的横摆角速度与质心侧偏角作为参考,设计了模型预测控制器,将二自由度汽车模型与CarSim整车模型进行了联合仿真。结果表明:模型预测控制方法相对PID控制方法更能有效地提高汽车的主动安全性。
主动前轮转向;模型预测控制;稳定性;安全性
近年来,随着汽车电控技术的不断发展,汽车转向技术取得了较大进展。有多种方式可以实现:电控液压系统、电动助力转向系统、四轮转向系统、主动前轮转向系统、线控转向系统等[1-2]。主动前轮转向作为一项新的安全技术,可以通过对前轮施加一个附加转角来提高车辆的操作稳定性,区别于其他的汽车主动控制技术,分析研究基于主动前轮转向的操作稳定性具有重要意义[3]。
目前对车辆操纵稳定性的研究主要包括2个方面,一是以横摆角速度或质心偏角作为控制参数,采用现代控制理论和方法,如H∞控制[4]、模糊控制[5]、滑模控制[6]等对车辆的横向稳定性进行研究;二是采用现代技术对车辆关键状态及参数进行估计[7-8]。本文中提出了基于模型预测控制(MPC)的车轮转角控制策略,横摆角速度和质心侧偏角多目标控制,通过调整控制变量及输入变量的权重,实时地对未来过程进行预测和优化,从而保持汽车的稳定性。采用CarSim构建的整车模型,通过仿真对模型预测控制方法进行验证。
1 模型建立
从易于实时控制角度考虑,采用以前轮转角为输入,横摆角速度和质心侧偏角为状态量的线性二自由度模型。假定轮胎的横向力处于线性范围,即横向力与轮胎的侧偏角成比例关系,忽略轮胎的纵向力。
根据车辆的单轨模型,得到车辆线性动力学方程如式(1)所示:

由式(1)可得二自由度模型状态空间方程,如式(2)所示:

式中:

式中变量含义如表1所示。
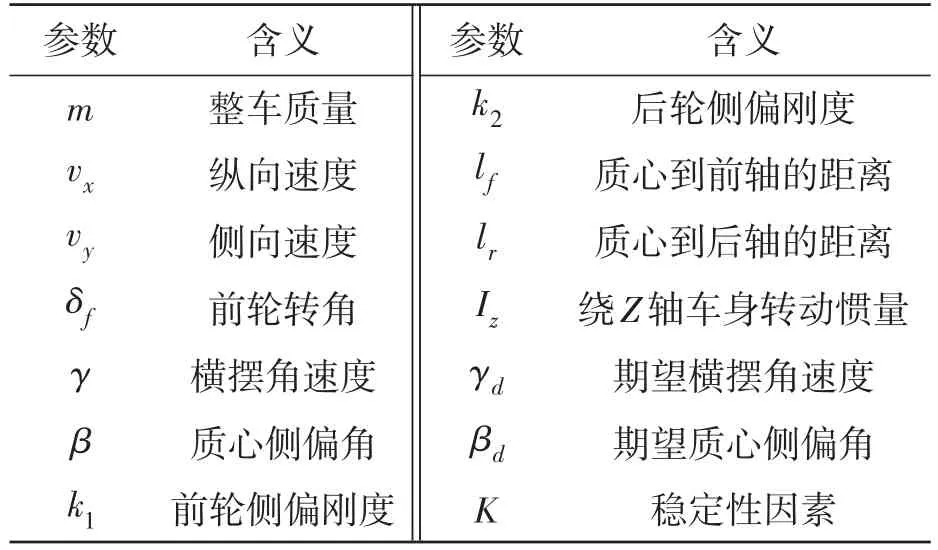
表1 整车模型参数及含义
2 主动前轮转向的控制策略
2.1稳定性控制及模型预测控制系统结构
车辆稳定性控制可分为两类问题[9]:一类是稳定性问题;另一类是轨迹保持问题。在本文中,前者可由横摆角速度来描述;后者可由质心侧偏角描述,与前者是相互联系的。
预测控制可以根据系统的模型和系统当前的运动状态来预测系统未来的状态,不断地求取出满足约束条件的控制量。预测控制精度高,鲁棒性强,能够克服模型误差和不确定环境带来的干扰影响[10]。
本文中采用基于模型预测控制的主动前轮转向系统是将采集到的前轮转角信号分别输入线性二自由度参考模型及非线性CarSim整车模型,计算出横摆角速度和质心侧偏角的期望值与实际值,输入模型预测控制器,通过预测模型、滚动优化和反馈矫正来缩小实际值与期望值的差,提高汽车转向行驶的操纵稳定性。
2.2期望横摆角速度和期望质心侧偏角
车辆的横摆角速度和质心侧偏角是描述车辆运动状态的重要参数,从不同侧面表征了车辆的稳定性。驾驶员期望车辆在转向过程中,车辆具有线性响应特征。在已知车速和前轮转角的条件下,车辆横摆角速度和质心侧偏角的期望值,可由二自由度模型计算[11],如式(3)所示:

式中:

式中参数定义如表1所示。
3 模型预测控制器设计
3.1模型预测控制
本文中设计的模型预测控制回路主要由模型预测控制器、状态估计模块和被控对象构成。其中模型预测控制器由系统模型、性能指标、约束及动态优化组成;状态估计模块即模型预测控制的二自由度参考模型;被控对象为CarSim整车模型。模型预测控制系统回路如图1所示。

图1 模型预测控制回路
模型预测控制策略需要分步解决问题。首先进行模型预测:在每个“当前采样时刻”,预测出未来某段时间内的过程输出,这种预测基于系统模型,由此得出未来输出序列;其次进行最优控制:对设计的性能指标进行极小化,得到未来时刻的最优控制序列,该序列将使得未来的输出在性能指标“最优”的意义下达到设定值;最后是动态优化:在当前时刻,仅采用第一个最优控制输入,在下一个采样时刻,重复上述过程,达到不断优化的效果,这是与传统最优控制最大的区别。
3.2控制器模型离散化
要先对控制器模型进行离散化,将控制器模型改写为增量状态空间模型,如式(4)所示:

式中:
Ad,Bd和Cd分别为A,B和C的离散矩阵。


式中:t0,t1,t2…tN为各个子区间的节点。
控制变量和状态变量根据上述节点进行离散化。其形式为

δfi(t),γi(t)和 βi(t)分别为t时刻的前轮转角、横摆角速度和质心侧偏角。
3.3性能指标及约束
本文中运用的模型预测控制,其目标是使车辆的实际横摆角速度、质心侧偏角与期望的差值最小,反馈调节输出叠加转角,因此模型预测控制的性能指标设计为

模型预测在每一个时间步长内,需要解决以下最优问题:

式(7)~(11)是车辆动力学模型,式(12)表示转角的约束极限,式(13)表示2个控制步长间转角的约束极限。


4 仿真验证
在Matlab/Simulink中分别搭建线性二自由度模型和非线性CarSim整车模型,以线性二自由度模型作为参考,以CarSim整车模型作为控制对象,在2种工况下对模型预测控制方法进行验证。控制结构如图2所示。车辆的参量赋值如表2所示。

图2 基于模型预测控制的联合仿真结构图

表2 仿真参量值
4.1前轮转角阶跃输入
在Matlab/Simulink与CarSim联合环境中,对路面附着系数为0.85,初始车速为80 km⋅h-1,前轮转角阶跃输入,振幅为10°的工况进行仿真验证,仿真结果如图3所示。

图3 前轮转角阶跃输入仿真结果
从图3a可以看出,期望横摆角速度在1 s后产生阶跃,大小为10.8(°)/s,随后数值大小维持不变。经PID控制后的横摆角速度在1s后产生振幅不断减小的振荡信号,最终在6s后维持不变,与期望值大小相等。经模型预测控制后的横摆角速度在1s后产生阶跃,并在1.7 s后维持稳定且与期望横摆角速度数值相等。从图3b可以看出,期望质心侧偏角在1s后产生阶跃,大小为-0.42°,随后数值维持不变。经PID控制后的质心侧偏角在1 s后产生振幅不断减小的振荡信号,最终在6 s后维持不变,与期望值大小相等。经模型预测控制后的质心侧偏角在1 s后产生阶跃,并在2.1 s后维持稳定且与期望质心侧偏角数值相等。由图3结果表明:在前轮转角阶跃输入的多目标控制下,相对传统的PID控制模型预测控制能更好的跟踪车辆的稳定状态量,控制效果明显优化。
4.2前轮转角正弦输入
在Matlab/Simulink与CarSim联合环境中,对路面附着系数为0.85,初始车速为80 km⋅h-1,前轮转角正弦输入,振幅为10°周期为4s工况下进行仿真验证,仿真结果如图4所示。

图4 前轮转角正弦输入仿真结果
从图4a可以看出,期望的横摆角速度做振幅为12(°)/s、周期为4s的正弦运动,经过PID控制后的横摆角速度与期望值间的差距维持在2%~ 10%。通过模型预测控制后的横摆角速度在0.7s后与期望值几乎相同。从图4b可以看出,期望的质心侧偏角做振幅为0.4°、周期为4s的正弦运动,经过PID控制后的质心侧偏角与期望值间的差距维持在1%~10%。通过模型预测控制后的质心侧偏角在0.5 s后与期望值几乎相同。由此可以看出,对于在前轮转角正弦输入的多目标控制下,模型预测控制比PID控制更具优势,明显提高对目标值的跟踪响应,具有很好的控制效果。
5 结论
本文中联合建立的线性二自由度模型和非线性CarSim整车模型,可以有效地实现基于模型预测控制的主动前轮转向的操纵稳定性控制。仿真结果表明:在进行主动前轮转向的操纵稳定性控制时,针对多目标控制,相比传统的PID方法模型预测方法可以更好地跟踪期望轨迹,具有良好的稳定性控制效果,提高了汽车转向的操纵稳定性。
[1]来飞,于雅丽.主动前轮转向客车的操纵稳定性仿真分析[J].客车技术与研究,2014,(02):5-8.
[2]胡爱军,吕宝占.汽车转向系统发展趋势[J].拖拉机与农用运输车,2011,38(1):3-6.
[3]李一染,朱卿,陈慧.主动前轮转向控制技术的现状与发展趋势[J].上海汽车,2008,(10):30-35.
[4]Kazuya,Kiatjmai,Huei Peng.H∞control for integrated side-slip roll and yaw controls for ground vehicles[C]// 5,th Int,1 symposium on advanced vehicle controlMicho⁃gan USA,2000,08:158-172.
[5]Buckholtz R.Use of fuzzy logic in wheel slip assignment-PartⅡ:yaw rate controlwith side angle limitation[C]// SAE,2002,01:1220-1226.
[6]Toshihiro H,Osamu N,Hiromitsr K.Model following slidingmode control for active four-wheel steering vehi⁃cle[J].JSAE,2004,25(4):305-313.
[7]赵树恩,李以农,郑玲,等.基于滑模控制理论的车辆横向稳定性控制[J].重庆大学学报:自然科学版,2007,30(8):1-5.
[8]David M,Bevly,Jihan Ryu,J.Christian Gredes Integrat⁃ing INS sensors with GPSmeasurements for continuous estimation of vehicle sideslip roll and tire cornering stiff⁃ness[J].IEE Transactions on intelligent transportation system.
[9]O.Pantalé,J.L.Bacaria,O.Dalverny,etal.2D and 3D numerical models of metal cutting with damage effects[J].Methods Appl.Mech.,2004,193:4383-4399.
[10]P.Falcone,H.E.Tseng,F.Borrelli,etal.MPC-based yaw and lateral stabilization via active front steering and braking[J].Vehicle System Dynamics,2008,46:611-628.
[11]Y.Kyongsu,C.Taeyoung,K.Jeontae,etal.An investi⁃gation into differentialbraking strategies for vehicle stabil⁃ity control[J].Journal of Automobile Engineering,2003,217(12):1081-1093.
Study on Handling Stability of Active Front Steering
Chen Shengpeng1,Feng Nenglian1,2,Tang Jie1,Zhang Yang1,ShiShengqi1,Pan Yang2
(1.Schoolof Engineering,AnhuiAgriculturalUniversity,Hefei230036,China; 2.College of Environmentaland Energy Engineering,Beijing University of Technology,Beijing100022,China)
Asan importantpartofautomotive active control,the active frontsteering(AFS)has the abili⁃ty of improving vehicle’shandling stability.The yaw rate and sideslip angle serve as twomain indexes of vehicle’shandling stability and offer reference to the stability ofvehicle.Based on themodelpredictive control(MPC)method a controllerwas designed for the purpose ofyaw rate and sideslip control.By cosimulating the 2-DOF and CarSim vehiclemodel,the results show theMPC controller ismore effective than PID controller to improve the stability and safety ofvehicle.
active frontsteering;modelpredictive control;stability;safety
10.3969/j.issn.1008-5483.2014.03.002
U461.6
A
1008-5483(2014)03-0011-05
2014-09-15
国家自然科学基金项目(51075010)
陈升鹏(1992-),男,安徽滁州人,硕士,主要从事汽车动力学控制研究。
