一种IPMC传感器实验平台设计*
2014-09-25谭永红
江 春, 谭永红
(上海师范大学 精密机电系统与控制工程研究室,上海 200235)
0 引 言
离子交换聚合金属材料(ionic polymer-metal composite,IPMC)是一种新型电致形变高分子材料[1],也被称之为人工肌肉。其在电场作用下可呈现伸缩、弯曲等各种响应特性;同时,当IPMC受外部力发生形变时,其内部将产生一定的电势,使机械能转换为电能。IPMC制动特性的研究已逐渐趋于成熟,并实现了相关的应用,例如:美国NASA的JPL实验室用IPMC驱动器制造了与自动刮雨器相类似的除尘刷,用于太空仪器表面除尘[2];日本Eamex公司开发了IPMC材料驱动的商业产品人工鱼[3];日本的名古屋大学研制了基于IPMC的泳动机器人[4];以及微小胶囊阀[5]、微小夹持装置[6]等。而IPMC传感特性的研究尚处于实验室阶段,研究相对较少,因此,IPMC传感性能的研究将会是未来IPMC领域的研究趋势。
在对IPMC厚度方向给一定的变形时其会产生一定的电压,若要研究IPMC传感性能就得研究输入信号与输出信号之间的关系,本实验中IPMC为长31 mm、宽6 mm、厚0.5 mm长条形薄片,给IPMC厚度方向施加什么样的压力信号尤为关键,因此,在研究IPMC传感特性时,良好的实验平台决定着给IPMC施加激励信号的准确性与稳定性。本文以STM32单片机为控制核心[7,8],搭建起IPMC实验平台。
1 现有实验平台的缺点
现有实验平台由51单片机、步进电机、OP07放大电路、激光位移传感器以及信号采集设备组成,如图1所示。平台底部为步进电机,其工作原理为:联动装置通过联轴器与步进电机结合,通过51单片机和驱动电路来控制步进电机按某个角度来回正反转,当步进电机在一定角度内来回正反转的同时,联动装置上的夹子将夹住IPMC带动其按照一定的规律产生形变,激光位移传感器采集IPMC摆动幅度值,通过示波器来读取并显示IPMC施加的激励信号波形。
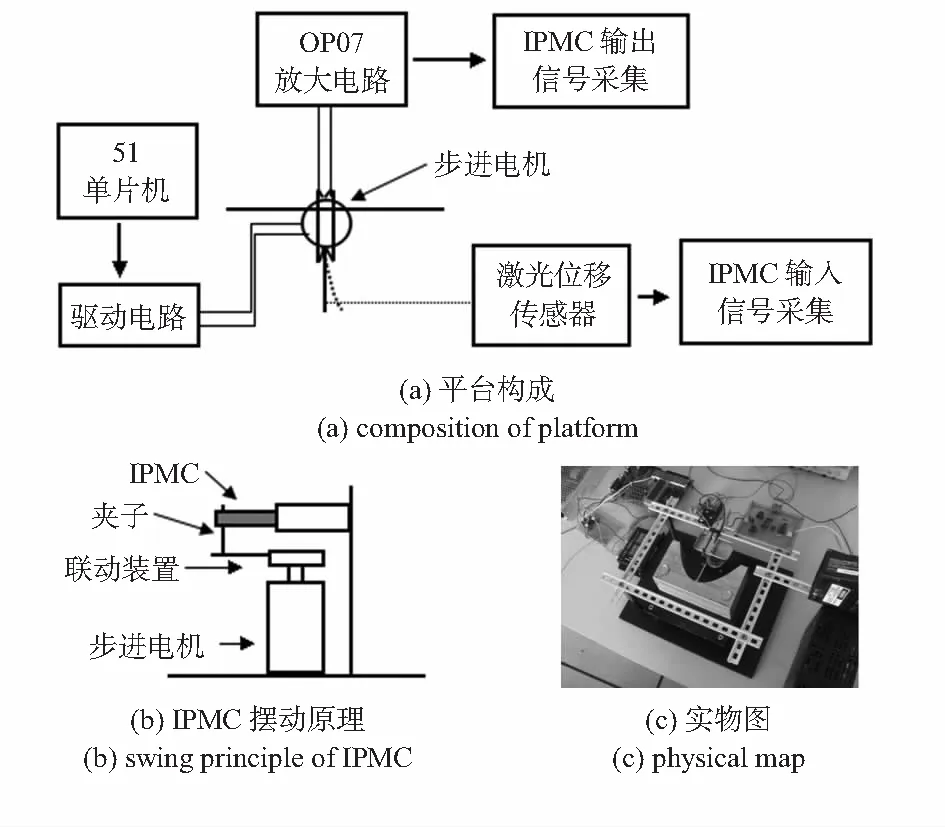
图1 现有的IPMC实验平台结构示意图
但是由于步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这样反映在IPMC运动过程中就是每次运动一个幅度,使得测量到IPMC输入信号不均匀连续,并且IPMC是在低频信号(0.1~2 Hz)的作用下产生的电压比较明显[9],因此,在低频环境下,步进电机的缺陷更大。同时,步进电机固定转角正反转不易产生反映在IPMC运动轨迹上的正弦信号,即在IPMC未发生偏转处速度最大,IPMC将达到最大角度处步进电机转速趋近于零,亦不便于后期IPMC对输入基本的正弦信号的所产生的状态信号进行分析。
2 实验平台的改进
2.1 总体方案设计
改进的实验平台将步进电机更换为直流伺服电机,直流伺服电机相较于步进电机其控制精度更高,克服了步进电机随脉冲转动步距角的不连续性。新的实验平台工作原理是以STM32为控制核心,并通过精密电位器测得角度值做反馈,PID控制直流伺服电机转动角度的闭环伺服系统,如图2所示。
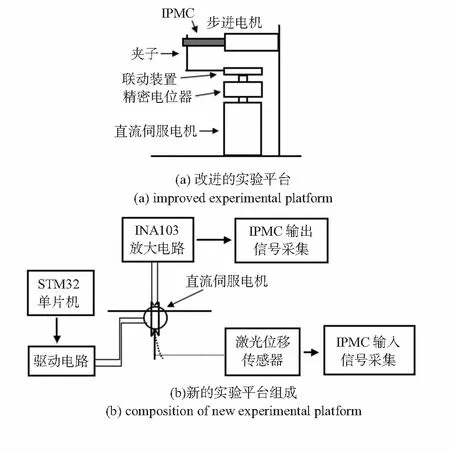
图2 改进后的IPMC实验平台示意图
实验装置选用STM32F103单片机为控制核心,直流伺服电机、精密电位器WDD35、以及由LMD18200构成的驱动电路所组成。STM32F103单片机产生PWM波经由驱动电路驱动电机转动,同时,精密电位器测得直流电机转动角度,在正最大角度处和负最大角处给单片机输出反向电压信号给LMD18200,让电机保持在固定角度内来回正反转,整个过程为PID控制,同时,电机转速可通过调节PWM占空比可调。系统总体设计框图如图3所示。
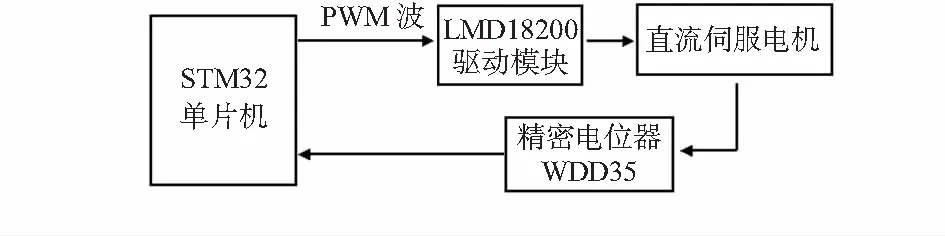
图3 硬件系统框图
2.2 主控模块
主控模块的STM32单片机是控制器的核心部分。该单片机是ST意法半导体公司生产的32位高性能、低成本和低功耗的增强型单片机,它的内核采用ARM公司最新生产的cortex-M3架构,最高工作频率72 MHz,256 k的程序存储空间、48k的RAM,8个定时器/计数器、2个看门狗和一个实时时钟(RTC),片上集成通信接口有2个I2C,3个SPI,5个USART,1个USB,1个CAN,2个和1个SDIO,并集成有3个ADC和1个DAC,具有80个I/O端口。
2.3 电机驱动模块
LMD18200是美国国家半导体公司(NS)推出的专用于直流电动机驱动的H桥组件。峰值输出电流高达6 A,连续输出电流达3 A;工作电压高达55 V;TTL/CMOS兼容电平的输入;并具有良好的抗干扰性。同一芯片上集成有CMOS控制电路和DMOS功率器件,其内部集成了4个DMOS管,组成一个标准的H型驱动桥。通过充电泵电路为上桥臂的2个开关管提供栅极控制电压,充电泵电路由一个300 kHz左右的工作频率。
2.4 放大电路
采用低噪声、高精度的仪表放大器INA103进行放大器的设计制作来代替原有IPMC实验平台当中的由OP07芯片构成的放大电路。它具有非常宽的频带宽度和优越的动态响应特性,并且INA103芯片具有超低噪声和失真小的特点,使得噪声大大降低。
2.5 系统的软件设计
当把直流电机闭环控制所需的程序编译没有错误,利用Keil 4编译环境把程序通过J-LINK下载到STM32单片机。闭合直流电机闭环控制模块的电源开关,电机开始转动,STM32单片机隔50 ms采集精密电位器WDD35角度值,增量式PID运算,调节PWM波的占空比。不断地调试PID参数,可以使电机的转角达到给定值,这样即可使电机按照固定角度来回转动,从而带动IPMC薄片做往复运动。系统的主程序是一个循环程序,其流程图如图4所示。其速度控制算法采用增量式PID算法[10,11]。相比于位置式PID算法,增量式PID算法不容易引起积分饱和,能获得更好的控制效果。
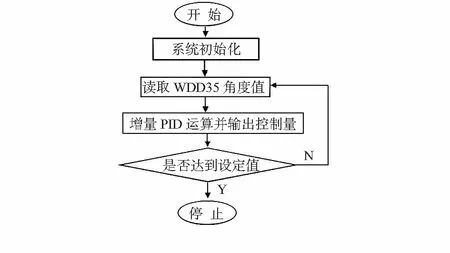
图4 程序流程图
3 实验效果
采用改进后新的实验平台设计,可以通过调节PMW占空比来调节直流伺服电机的转速,从而间接调节IPMC摆动频率,同时,也可以通过修改程序中直流伺服电机角度值达到改变电机转动角度大小,从而间接调节IPMC摆动幅度的目的。通过PID算法控制直流伺服电机摆动更加精确,用激光位移传感器测得IPMC运动轨迹信号为近似标准正弦信号,相比步进电机产生的步进不连续现象有了很大的提升,使得IPMC在低频环境下采集到的信号具有很好的连续性与稳定性。
图5给出了IPMC在电机以1.2 Hz来回摆动下测得的输入信号,结果表明:给IPMC驱动的输入信号近似标准正弦信号。同时IPMC摆动频率可任意调节,满足实验需在不同频率下测试的需要。图6是调节电压后,使输出PWM波占空比增大,加大电机转速后,IPMC在2.8 Hz下测得的输入驱动信号。因为IPMC受到温度和湿度的影响大,因此,所有测试结果均为IPMC在室温20℃环境下测得的。另外,IPMC输出信号经由INA103芯片构成的放大电路后产生的噪声也更低,图7为给定2.8 Hz正弦信号驱动IPMC后产生输出响应效果,相比之前的OP07放大电路输出,信号噪声明显降低。
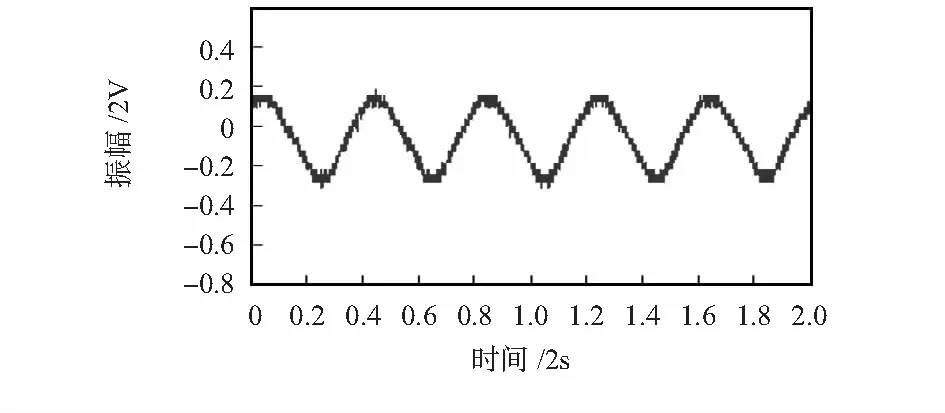
图5 1.2 Hz正弦信号
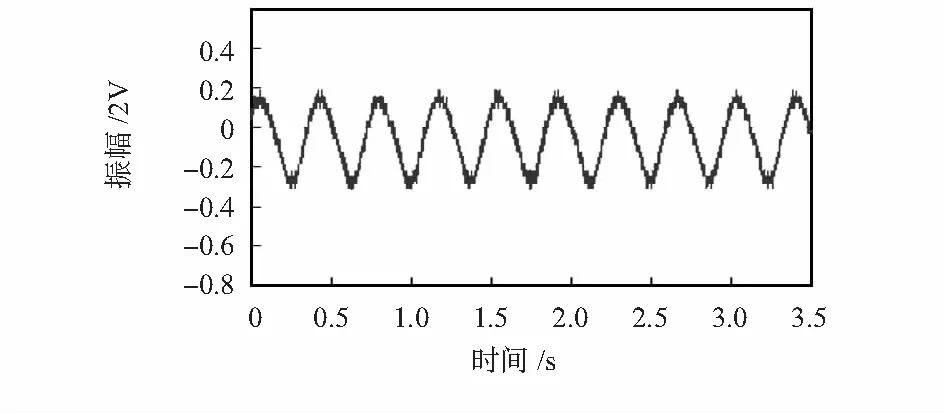
图6 2.8 Hz正弦信号
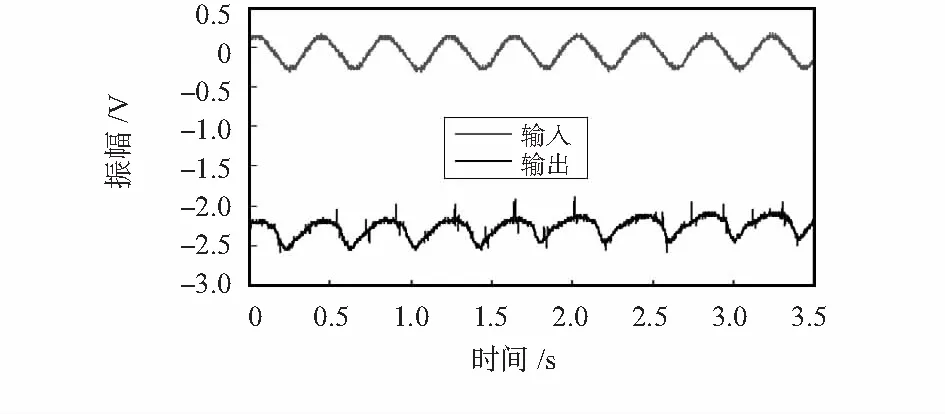
图7 给2.8 Hz正弦信号IPMC产生的响应
4 结束语
本文介绍了利用STM32单片机与精密电位器作为角度反馈改进了原有实验平台的设计,将步进电机换为直流伺服电机,并采用PID算法来控制直流伺服电机按照固定角度转动,以使IPMC薄片来回弯曲摆动,这种新的设计可以通过改变直流伺服电机的转速和转角间接改动IPMC的摆动频率和幅度。而且直流伺服电机摆动效果可以使得IPMC驱动信号相比步进电机摆动效果更好,并采用具有超低噪声和失真小的特点的INA103芯片作为放大电路,大大的降低了IPMC输出信号的噪声,实验表明:这种新的实验平台设计不仅对IPMC施加的变形信号更加稳定和准确同时也使得IPMC输出的传感信号噪声干扰更小,并且对IPMC摆动频率和幅度可调,为后续IPMC输入不同信号的研究提供良好的实验基础[12],具有非常高的实用价值。
参考文献:
[1] Oguro K,Kawami Y,Takenaka H,Bending of an ionic-conducting polymer film-electrode composite by an electric stimulus at low voltage[J].Journal of Micromachine Society,1992(5):27-30.
[2] Sar Coheny.Electroactive polymer actuators as artificial muscles-capabilities,potentials and challenges[C]∥Proceedings of Robotics 2000 and Space 2000,Albuquerque,USA,2000: 191-202.
[3] Guo S X,Fukuda T,Asaka K.A new type of fish-like underwater microrobot[J].IEEE/ASME Transactions on Mechatronics,2003,8(1):136-141.
[4] Takagi Kentaro,Yamamura Masanori,Luo Zhiwei,et al.Development of a rajiform swimming robot using ionic polymer artificial muscles[C]∥Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems,Beijing,2006:456-462.
[5] Guo S,Hata S,Sugumoto K,et al.Development of a new type of capsule micropump[C]∥International Conference on Robotics and Automation, ICRA’99,Detroit,1999:2171-2175.
[6] Lumia R,Shahinpoor M.Microgripper design using electro-active polymers[C]∥Proceedings of SPIE the 1999 IEEE International Conference on Robotics and Automation,Newport Beach,1999:2226-2231.
[7] 李 宁.基于MDK的STM32处理器开发应用[M].北京:北京航空航天大学出版社,2008.
[8] 孙书鹰,陈志佳,寇 超.新一代嵌入式微处理器STM32F103开发与应用[J].微计算机应用,2010,31(12):22-25.
[9] Shahinpoor M,Kim K J.Ionic polymer-metal composite: I.fundamentals[J].Smart Materials and Structures,2001,10:819-833.
[10] 潘新民,王燕芳.微型计算机控制技术[M].北京:电子工业出版社,2006.
[11] 王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2003.
[12] Claudia Bonomo,Luigi Fortuna,Pietro Giannone,et al.A method to characterize IPMC membrane sensor[D].Ottawa,Canada:University of Catania,2005.