基于LM3S811芯片的“应声而来”智能家居垃圾桶*
2014-09-06刘鹏,李进
刘 鹏,李 进
(1.重庆电子工程职业学院通信工程学院,重庆 401331;2.重庆电子工程职业学院建筑与材料学院,重庆 401331;3.重庆工商大学计算机科学与信息工程学院,重庆 400067)
基于LM3S811芯片的“应声而来”智能家居垃圾桶*
刘鹏1,3*,李进2
(1.重庆电子工程职业学院通信工程学院,重庆 401331;2.重庆电子工程职业学院建筑与材料学院,重庆 401331;3.重庆工商大学计算机科学与信息工程学院,重庆 400067)
摘要:以LM3S811为核心设计一种智能家居垃圾桶,实现语音控制垃圾桶的运动。以拾音器作为声音传感器,采用延时估计法实现声源方位的实时检测;采用超声波传感器实现了垃圾桶行进的避障功能;同时,采用语音识别技术实现对用户的开启和关闭垃圾桶盖等各种语音指示的识别。关闭垃圾桶盖后,自动回到原来位置。从而达到了垃圾桶“应声而来”的智能化。
关键词:LM3S811;智能家居;声源定位;避障;垃圾桶
现代家居,人们越来越注重家中各种家具的智能化[1]。目前,市场上的家居垃圾桶都是放置在一定位置。扔垃圾时,需要走到垃圾桶放置处扔垃圾。这对于老人、孕妇或者有残疾的病人来说,存在着不便、费时、费劲等问题。本文提出了具有“应声而来”功能的垃圾桶的设计方案,即当用户想要扔垃圾的时候,只要一声令下,垃圾桶就会快速准确无误地来到身边。扔完垃圾,关闭垃圾桶盖后垃圾桶自动回到原位。本文设计出了一套基于DSP控制的具有语音识别技术的声控智能垃圾桶,实现了对其“应声而来”的控制。
1 系统方案
本文以LM3S811作为核心控制器,以拾音器作为声音传感器,采用延时估计算法,实现对用户位置的实时检测[2]。采用超声波传感器实现自动躲避行进过程中的障碍,准确到达用户方位。同时,采用语音识别技术实现对用户的开启和关闭垃圾桶盖等各种语音指示的识别,从而使得家居中常用的垃圾桶具有声控避障功能,能“应声而来”,体现了智能化。
图1是系统结构示意图。
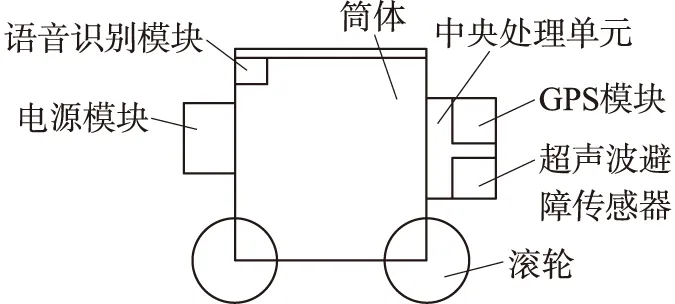
图1 结构示意图
本系统主要包含系统硬件和系统软件两大部分。
2 系统硬件设计方案
系统硬件包括垃圾桶车体机械结构和硬件控制电路。其中车体机械结构为1部三轮小车车体,能按照在不同地点处的用户所发出的声音指令,自动行驶到用户所在地点。关闭垃圾桶盖后,自动回到原位。
系统硬件设计方案如图2所示。,包括电源模块、DSP最小系统、声源定位模块、语音识别模块、避障模块、电机驱动模块。首先通过语音识别模块识别出用户的呼叫命令,同时通过声源定位模块判断用户的所处位置,再通过DSP产生驱动电机的PWM信号,利用电机驱动模块驱动垃圾桶自行向声源方向行驶。在行进过程中,利用避障模块自行避开所遇障碍。同时,该系统还支持用户对垃圾桶开启和关闭垃圾桶盖等语音控制。
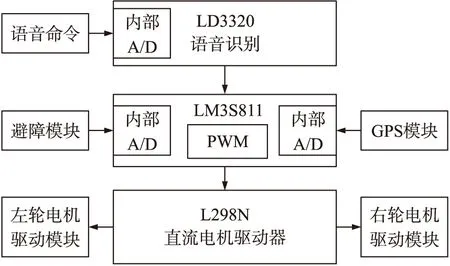
图2 系统总体结构
2.1电源模块
本系统电源模块如图3所示,主要有:LM3S811芯片的核心需要+3 V供电,I/O口需要+3.3 V供电;凌阳语音芯片SPCE061A的5 V供电;拾音器的5 V供电;直流电动机的5 V供电。
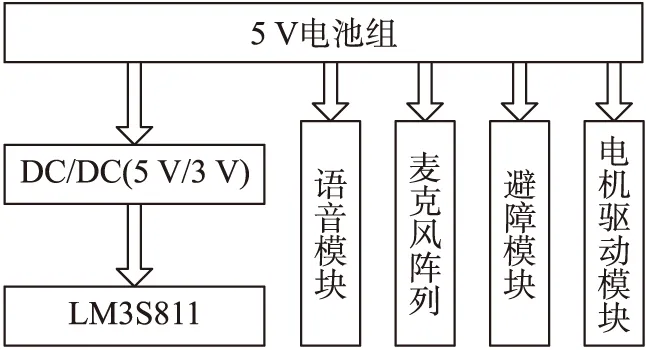
图3 电源模块
2.2声源定位模块
声源定位模块主要包括拾音器构成的麦克风阵列和信号处理单元,如图4所示。

图4 拾音器与DSP连接图
本系统中麦克风阵列选用2个拾音器来实现,其中拾音器具有低成本、噪声小、保真度高、工作电压范围宽、耗电小、传输距离远等优点。其监听范围为30 m2~50 m2。由于拾音器所拾取的声音信号太小,易受环境噪声的影响,因此很有必要对声音信号进行预处理,通过信号调理单元的处理,使之能够满足系统的要求。本系统采取两级放大电路,主要用来将拾音器所得到的微弱电信号进行放大。又由于AD模块不能采集负电压信号,因此需要对放大后的电信号进行偏置,使其不出现负电压,便于DSP采样,使之输出的误差更小。
2.3语音识别模块
本系统以凌阳语音芯片SPCE061A的精简开发板作为语音模块来实现语音的识别,与专用的语音处理芯片相比,省去了必要的硬件设计,具有结构简单、成本低、易实现的特点。该芯片拥有8路10 bit精度的ADC,其中一路为专用声音转换通道,并且内置麦克风放大器和自动增益控制电路,这为实现语音识别提供了方便的硬件条件。SPCE061A还具有通用异步串行接口模块,可以用来与LM3S811之间的串行通讯。借助于IOB端口的复用功能和UART IRQ中断,可以同时完成UART接口的接收与发送过程。SPCE061A与LM3S811通过串口进行通信,如图5所示。

图5 语音芯片SPCE061A与DSP的连接图
2.4电机驱动模块
电机驱动模块根据DSP控制器的控制信号驱动电机的运行:前进、转弯、后退等。电机的驱动电路采用H桥驱动电路,如图6所示。
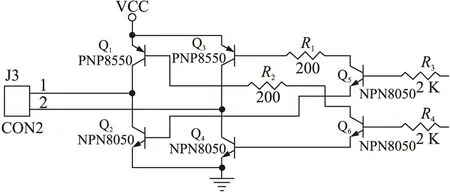
图6 H桥驱动电路
Q1、Q2、Q3、Q44个三极管组成4个桥臂,Q1和Q4组成一组,Q2和Q3组成一组,Q5控制Q2、Q3的导通与关断,Q6控制Q1和Q4的导通与关断,而Q5、Q6由LM3S811的IO口来控制,这样就可以通过IO输出的高低电平控制4个桥臂的导通与关断控制电机的运行状态,使之正转反转或者停转,进而控制垃圾桶的行驶。为了避免用分立元件带来的电路板过于复杂,在设计中使用了H桥驱动元件L298N芯片。
2.5避障模块
障碍检测模块作为对外部障碍信息的采集窗口,将行进过程中障碍信息检测出来,并传递给DSP控制器进行处理。系统中采用的传感器是UCM40T/R。如果传感器接收到反射的超声波,则通知DSP控制器有障碍物,反之则可以行驶。超声波蔽障模块与DSP的连接图如图7所示。
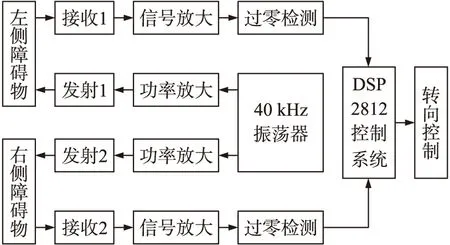
图7 超声波蔽障模块与DSP的连接图
3 系统软件设计方案
本系统的系统软件主要包括:数据采集模块、SCI通讯模块、特定声源定位算法模块和避障软件模块。本系统的总体软件流程图如图8所示。

图8 软件总体框图
3.1声源定位算法
针对声源定位,本系统采用基于传声器阵列时延估计法来估测用户发声的方向[3]。基于时延估计的声源定位算法分为时延估计和方位估计2个部分。
3.1.1时延估计算法[4]
时延估计采用广义互相关法,计算声源到2个传声器之间的时间差。假设两传声器L1和L2间距为d,在没有混响的情况下,两传声器接受到的信号x1和x2为
x1(t)=a1s(t)+n1(t)
(1)
x2(t)=a2s(t-τ)+n2(t)
(2)
其中s(t)为声源信号,α1和α2是声波从声源到传感器的传播衰减系数。τ是声源传播到2个传感器所需延迟时间。n1(t)和n2(t)为环境噪声。这时,到达时延可以采用传统的互相关法进行估计,互相关方程为
(3)

根据上式选取不同的权函数ψ12(ω)就可得到到达时延的不同算法,它的选取可根据实际的声学环境选择相应的准则,可以得到最好的估计效果。这种方法通过对信号互功率谱的归一化,去除了信号的幅度信息,只保留了信号的相位特性,对于噪声和混响都有一定的抑制效果。
3.1.2方位估计
方位估计采用几何定位法,利用角度距离估计方位。利用2个拾音器摆成如图9所示,利用拾音器1和拾音器2接收到得时间差就可以检测出声源偏离主轴的角度θ。

图9 几何定位法
由图9可得
(4)
AC=(tA-tB)V声音
(5)
由于AB距离和V声音已知,时延(tA-tB)可由式(1)~式(3)算出,再由式(4)、式(5)可求得声源偏移正方向的角度θ,则可控制电机转动使垃圾桶向用户方位旋转并前进。
3.2语音识别算法
针对语音的识别,本系统采用LD3320对所采集的语音进行处理[5],其处理过程如图10所示。首先要滤掉输入语音信号的噪音,然后线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征一致时,计算机便识别输入的语音信号并输出结果[6]。
由于语音含有不确定因素,因此输入的语音与标准模式的特征完全一致的情况几乎不存在。因此,预先制定好计算输入语音的特征模式与标准模式类似程度的算法规则,把即最类似的模式作为识别相应语音的方法。

图10 语音识别过程
3.3避障算法
避障采用声波反射原理,在测量过程中声波信号由传感器发出,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即反射回来,超声波接收器收到反射波就立即停止计时[7-8]。因此采用时间差测距法,根据计时器记录的时间就可以计算出发射点距障碍物的距离S。即:S=vΔt/2。式中v为超声波在空气中的传播速度,该值与温度有关,经计算其在常温下近似为340 m/s,Δt为发射、接收信号的时间差。
系统中在小汽车车前、后、左、右分别放置超声波传感器,可分别测量出垃圾桶与障碍物之间的距离,根据距离的远近决定垃圾桶的转向。
4 实验结果
图11是智能家居垃圾桶实物图。测试条件为:(1)空间要求:10 m×10 m空间。(2)室温:(20±1)℃,定温不少于12 h。(3)室温梯度:不大于0.5 ℃/h和0.5 ℃/m。(4)相对湿度:(60±5)%。

图11 智能家居垃圾桶实物图
在设计过程中进行了大量的测试。分别在垃圾桶的左侧和右侧多个角度进行呼唤垃圾桶,垃圾桶接收到用户的呼唤后能蛇形行驶到用户身旁,并且能自动打开垃圾桶盖,扔完垃圾后,关闭垃圾桶盖,自动回到原位。
用户相对垃圾桶所站的8个测试位置如图12所示,其中用户距离垃圾桶的直线距离均大于5 m。测试结果如表1和表2所示。
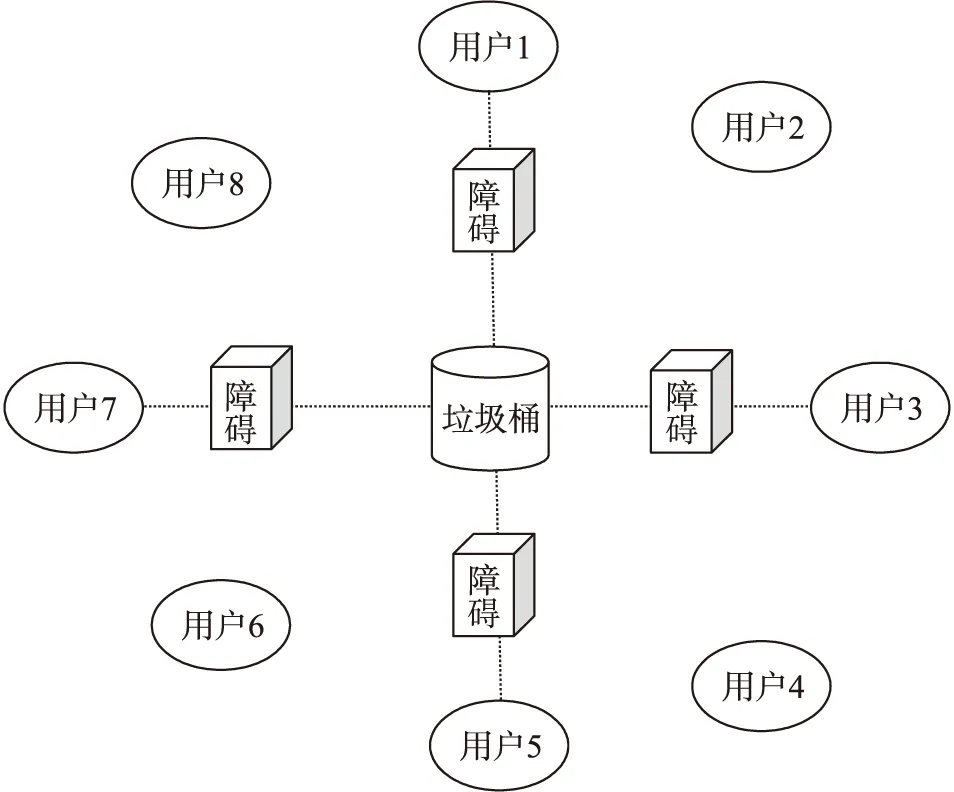
图12 实验测试平面关系图
表1声音定位测试结果

用户用户与垃圾桶的角度(顺时针)/(°)到达用户身边的偏差距离/cm1号0182号45173号90204号135225号180196号225247号270168号31519
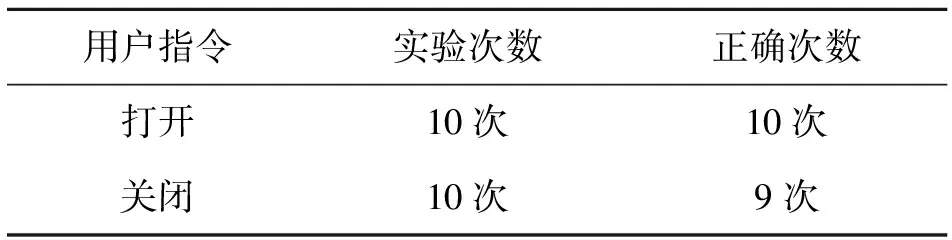
表2 声音识别测试结果
5 结论
从上面的实验结果可以看到,垃圾桶“听”到主人的呼喊后能自动到达主人身边,并且能识别主人的声音进行打开垃圾桶盖和关闭垃圾桶盖的动作,证明该系统基本上能满足要求,结果令人满意。本系统的创新点有:
(1)本系统充分利用了LM3S811的AD采样、中断、GPIO、SCI、定时器等功能,借助LM3S811的高速采样和快速计算能力采集到时间差信号,从而实现了系统的集成化。
(2)本系统利用对声音进行声源定位的方法,实现了垃圾桶对用户特定呼唤声的判断并定位,从而达到对用户呼唤循声前进的目的。
(3)所设计的垃圾桶能对用户声音指令进行识别,可达到垃圾桶应声而来的目的,从而使其具有人性化。
(4)所设计的垃圾桶在行进过程中不仅紧随用户的呼唤,而且在遇到障碍时,通过避障模块能够自行绕过障碍继续紧随用户行进,从而实现了智能化。
可以预计,随着算法的进一步优化,将会促进智能家居和机器人的发展。
参考文献:
[1]高同辉,郭蕊.基于ARM的家用智能垃圾桶设计[J].电子科技,2013,25(11):55-58.
[2]徐国洪,徐明.基于LM3S811的帆板控制系统设计[J].电工技术,2013,23(8):52-54.
[3]王春艳,孙志峰,陈洪海.基于四阶累积量的声波阵列时延估计算法[J].电声技术,2013,37(6):42-45.
[4]朱琦,阵列信号处理中的时延估计[J].电子器件,1997,20(1):364-368.
[5]刘耀文,宁媛.基于LD3320芯片的声电密码门设计[J].现代机械,2013(4):55-58.
[6]沈舒海,王晓东,胡珊逢.基于GPRS网络的智能家居控制系统[J].电子器件,2012,35(2):199-203.
[7]秦政,边信黔,严浙平.多波束前视声呐在潜器避障中的应用研究[J].电子器件,2007,30(5):1909-1913.
[8]陈华华,郭晔,杜歆.基于改进型遗传算法的动态避障路径规划方法[J].传感技术学报,2006,19(2):520-524.
刘鹏(1977-),男,汉族,山东威海人,重庆电子工程职业学院,副教授,博士,从事计算机通信技术方面研究,pengliu789@126.com;

李进(1975-),女,汉族,重庆人,重庆电子工程职业学院,助教,硕士研究生,从事计算机通信技术方面研究。
“OnCall”IntelligentHouseholdTrashCanBasedonLM3S811*
LIUPeng1,3*,LIJin2
(1.Department of Communication Engineering,Chongqing College of Electronic Engineering,Chongqing 401331,China;2.Department of Building Material Engineering,Chongqing College of Electronic Engineering,Chongqing 401331,China;3.College of Computer Science and Information Engineering,Chongqing Technology and Business University,Chongqing 400067,China)
Abstract:We designed an intelligence household appliance—an “on call” trash can,realizing the voice-controlling movement,with the design core of digital signal processor LM3S811.The system detects audio signal by using a pickup as a sound sensor,perceiving the direction of sound souce through the extension of estimation.Moreover,the ultrasonic sensor can shun obstacles during the movement of the trash can.By this way,the garbage can is more human and intelligent,reaching the goal of“on-call”intelligence trash can.
Key words:LM3S811;smart home;sound source localization;shun obstacle;trash
doi:EEACC:721010.3969/j.issn.1005-9490.2014.04.033
中图分类号:TP23
文献标识码:A
文章编号:1005-9490(2014)04-0737-05
收稿日期:2014-01-19修改日期:2014-02-18
项目来源:重庆市教委科学技术研究项目(KJ132206);重庆市高等教育教学改革重点研究项目(132122)
