一种无振荡误差的车载惯导系统测姿方法*
2014-09-06李瑞豹闫慧芳
孙 伟,丁 伟,于 婷,李瑞豹,闫慧芳
(辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000)
一种无振荡误差的车载惯导系统测姿方法*
孙 伟*,丁 伟,于 婷,李瑞豹,闫慧芳
(辽宁工程技术大学测绘与地理科学学院,辽宁 阜新 123000)
车载GPS/INS组合导航系统中的卫星信号易受环境影响出现失锁,而惯导独立工作时处于无阻尼状态,其特有的机械编排导致解算的姿态信息中存在舒勒振荡和傅科振荡误差,因此无法满足测量系统对姿态信息的高精度需求。为此,提出一种基于罗经方案的无振荡误差的车载惯导姿态确定方法,通过将加速度计测量的载体运动加速度进行低通滤波处理,引入惯性坐标系并间接地建立载体与导航坐标系之间的姿态转换矩阵,改变惯导无阻尼解算模式并实现系统无振荡性误差的姿态信息的求解。试验结果表明,论文提出的无振荡误差测姿方法具有为车载平台提供准确姿态信息的可行性与可靠性。
移动测量;惯导系统;姿态;振荡误差
移动测量系统广泛地应用于数字城市建设及公路交通监管等服务行业[1-2],基于GPS/INS的组合导航系统作为移动测量系统的主要姿态测量设备可为其提供高精度的三维姿态信息[3-5]。对于开阔的户外工作环境,GPS/INS组合系统可满足基本的姿态测量需求,但是对于隧道、井下或市区等特殊工种环境下,卫星信号易受干扰引起信息不连续或是完全被屏蔽进而导致组合导航系统只能工作于单一惯导模式[6-7]。纯惯导由于其特有的机械编排特性将处于无阻尼状态,由于重力加速度与水平解算回路的耦合导致解算的姿态信息中存在舒勒周期和傅科周期等振荡性误差[8]。对于采用中等精度惯性器件的导航系统而言,符合测量精度要求的独立工作时间仅限于几分钟甚至几十秒以内[9-10]。为解决移动测量惯导系统姿态解算过程中面临的上述问题,笔者结合捷联惯性导航技术的最新发展现状,提出一种无周期性振荡误差的移动测量惯导系统姿态确定方法,并进行试验分析与验证。
1 无振荡误差姿态解算原理
为避免传统惯导系统采用的基于导航坐标系系(n系)的姿态求解过程中,由于重力加速度与水平回路耦合而引起振荡性误差,在惯导系统对准结束后,设计了在赤道平面惯性坐标系(i系)下实现姿态信息的求取。陀螺仪具有测量任意瞬间包括地球自转运动和载体旋转的角运动信息能力,通过系统中积分作用可计算出载体相对惯性空间角姿态;加速度计输出包含载体线加速度和当地的重力加速度,经坐标转换和滤波处理后,可以得到相对惯性空间的重力慢漂变化过程。而惯性空间中的重力确定了一个主轴与地球旋转轴一致的锥体(如图1),从而可进一步确定地理北向并实现载体姿态的求取。
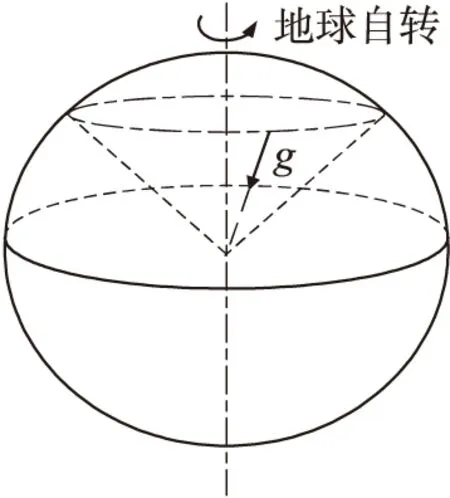
图1 重力矢量相对惯性空间慢漂示意图
1.1 陀螺旋转速率积分过程姿态矩阵初值的确定
设惯导系统初始对准结束时载体所在位置的纬度为L,根据图2所示导航坐标系与惯性坐标系的相对位置关系,将导航坐标系相对xn轴旋转90-L度得到惯性坐标系,两坐标系的转换矩阵可表示为:
(1)
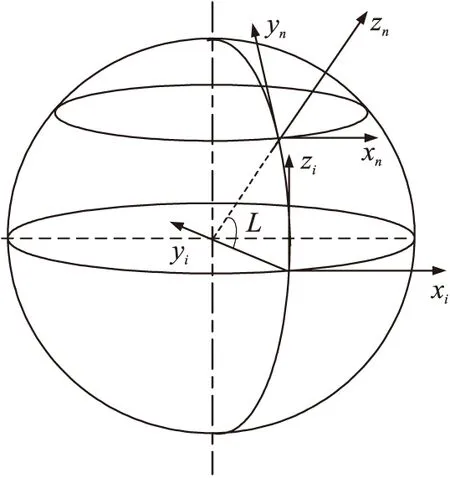
图2 导航坐标系与惯性坐标系的转换示意图
(2)
式(2)的计算结果用于陀螺仪测得的旋转速率在惯性空间进行积分的初始信息:
(3)

1.2 载体姿态信息求取
载体处于静基座环境时,加速度计测得的比力fb与重力矢量gb近似相等,此时可将加速度计输出直接投影在惯性坐标系:
(4)
(5)
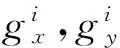
图3 重力慢漂在赤道平面投影示意图
图4 重力矢量与惯性系相对角位置
由漂移角度α可确定重力矢量相对惯性系在赤道平面的旋转矩阵:
(6)
根据图4所示重力矢量在子午圈的变化规律,得到重力矢量与赤道平面的夹角β:
(7)
由于加速度计敏感的重力矢量存在测量误差,β与测量载体所在纬度φ存在小角度误差,得到旋转矩阵为:
(8)
由重力矢量相对惯性系的夹角α、β可确定惯性坐标系到导航坐标系的旋转矩阵:
(9)
(10)
利用捷联矩阵与载体姿态角的转换关系,可实时确定载体姿态信息。

2 重力加速度提取
2.1 惯性系内开展重力提取的原因及方法
载体机动引起的扰动误差以及器件噪声是导致加速度fb剧烈变化的主要原因。即使载体不受扰动加速度影响只存在重力加速度时,重力矢量在载体坐标系中的投影也会随着载体的运动而变化,且变化不具规律性。所以难以设计可行的滤波方案在载体坐标系内完成对重力矢量的提取。针对如上问题,根据分析得到重力矢量在惯性系内作圆锥慢漂运动的特点,提出在惯性系内对重力矢量进行提取。
加速度计测量的载体加速度在惯性系上的投影可表示为:
(11)

图5显示出重力矢量g在惯性系的变化处于低频段,该结果可为巴特沃斯低通滤波器的设计提供依据。
2.2 小波降噪方案设计
结合图5所示的加速度频谱分析结果,加速度计输出信号中随机噪声与外界干扰多分布于高频部分,应用小波降噪具有多分辨率的特点可有效的将信号分解为高频部分和低频部分从而达到分离噪声的效果。而且相对于数字滤波,小波分析具有能够对信号进行局部分解和处理,具有多层细化的优势。它提供的自适应时域和频域同时局部化的分析方法,无论分析低频还是高频局部信号,都能自动调节时-频窗,以适应实际分析的需要。因而在对惯性器件进行小波降噪处理时,既能有效剔除高频噪声,又能完整保留高频有用信号,且不存在收敛时间延迟的现象。
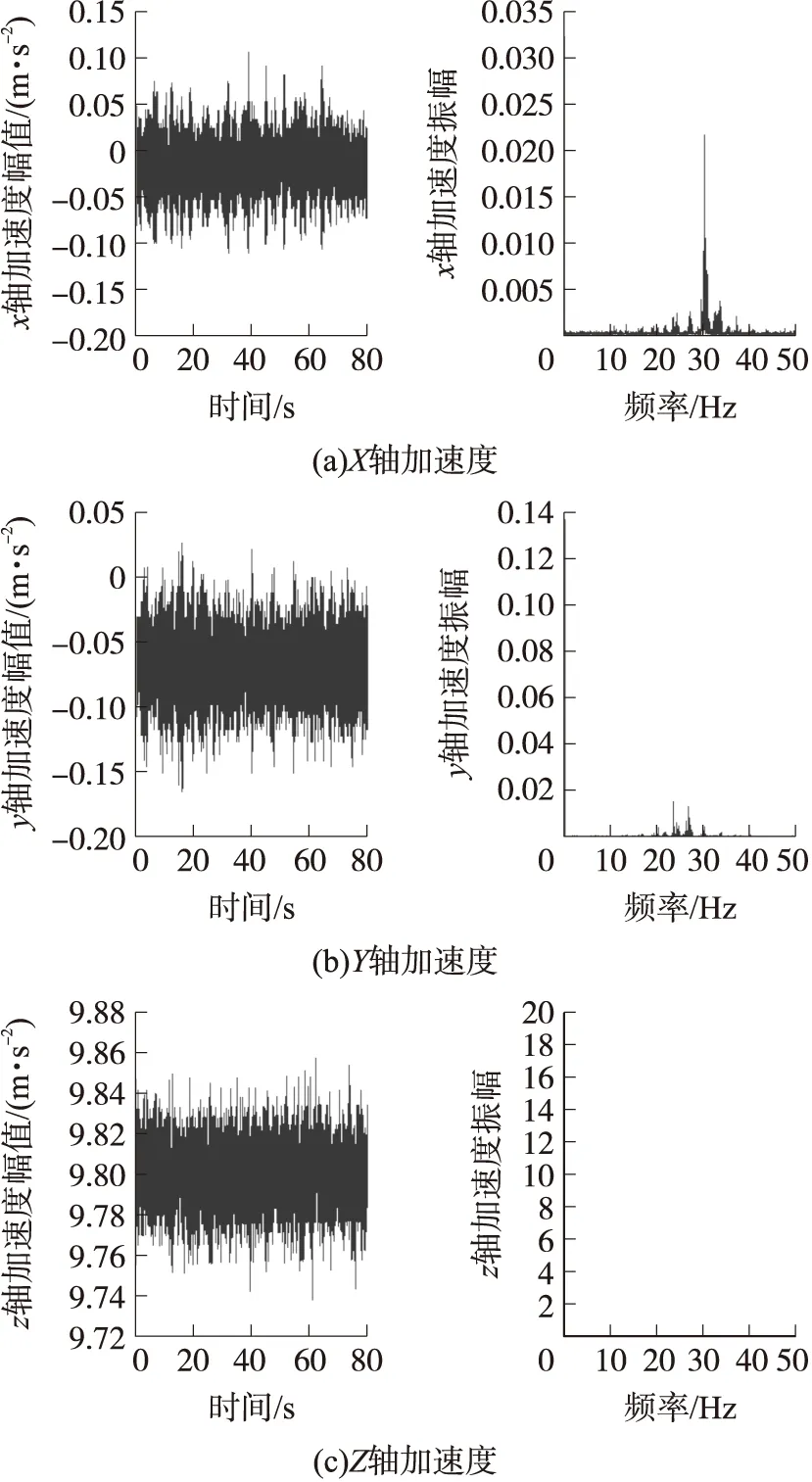
图5 某次车载试验加速度信息及其频谱分布
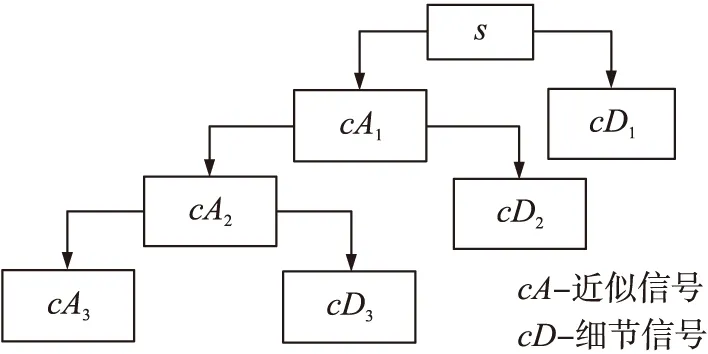
图6 小波分解结构图
小波降噪的执行过程可分为:信号分解、阈值处理和信号重构3个环节。
①信号分解过程如图6所示。
其中,cAi(i=1,2,3)和cDi(i=1,2,3)分别表示小波分解从第2层开始对上一层分解所得的低频分量继续分解后得到的低频分量和高频分量。
②在对惯性器件信号进行小波降噪时采用软阈值方法,其原理是将惯性器件高频信号小于阈值的部分置零,对于绝对值大于阈值的部分则输出其与阈值的差值。
③信号小波重构是信号小波分解运算的逆过程,将惯性器件原始信号多层分解后得到的最后一层低频近似信号cA和经过阈值处理的各层高频细节信号cD进行重构,得到小波降噪后的重构信号。
经过如上3个步骤的处理可实现惯性器件输出的降噪处理。
3 实验结果及分析
3.1 加速度去噪实验
加速度去噪水平的好坏直接制约着载体姿态解算精度的高低。为验证论文设计的小波降噪相对传统数字滤波的优势[12-13],以及对于滤除加速度计输出重力以外扰动信息和高频噪声有效性,截取某次实验的加速度数据输出进行处理。滤波前、后3个加速度计对应的加速度曲线如图7所示。

图7 滤波前后加速度对比曲线
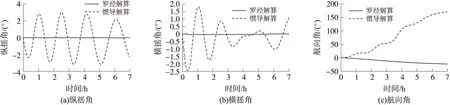
图9 载体静止状态下的姿态对比曲线
对比图7中滤波前后的加速度曲线可看出:采用小波降噪和数字低通滤波方案都可以滤除3个方向上加速度信息中的高频噪声,且滤波后曲线无失真并与原有曲线保持较好的相似性。但是,经过对比分析图7(b)和图7(c)可看出,数字滤波方法存在较明显的收敛过程和时间延迟现象,这个过程的存在将对惯导系统初始对准精度和快速性产生影响,采用小波降噪后得到的结果无收敛过程而且具有较好的跟随特性,该结果可直接用于载体姿态转换矩阵的求取。
3.2 姿态解算对比实验
为验证本文提出的基于罗经技术的无振荡误差姿态求取方案的可行性与可靠性,分别开展实验室内静基座环境下的转台实验和户外跑车实验。
将LCI惯导系统安装于三轴惯性测试转台的测试中心(如图8),将转台归零后保持静止,采集陀螺仪和加速度计输出。其中,三轴惯性测试转台的技术指标与陀螺仪和加速度计的指标参数分别如表1和表2所示。
由于舒勒振荡周期为84.4 min,为验证本文提出的无振荡误差姿态解算方法的有效性,将陀螺仪和加速度计输出的数据分别采取传统惯导解算和罗经方法解算,得到姿态对比曲线(如图9所示)。
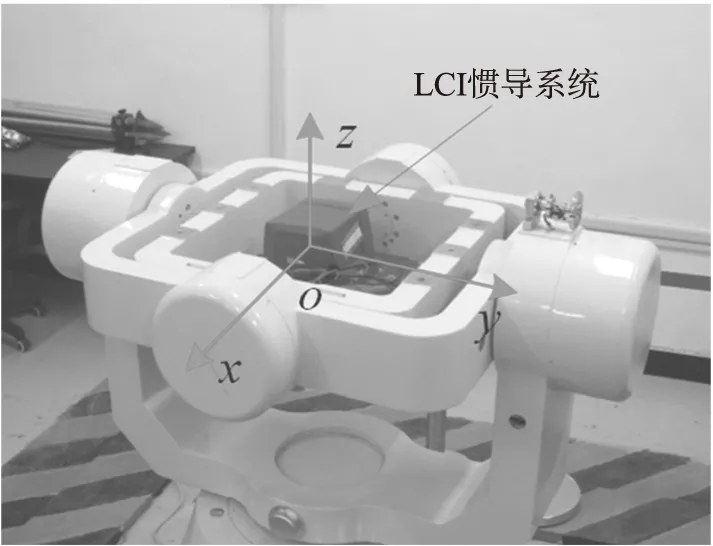
图8 转台实验
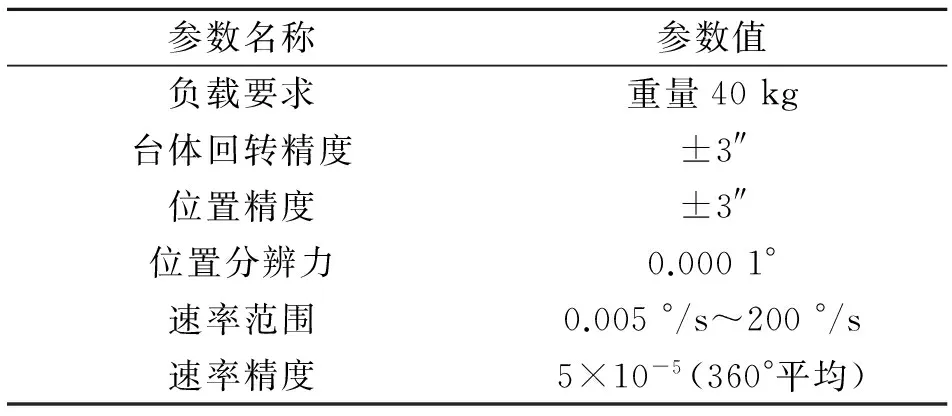
表1 三轴惯性测试转台技术参数
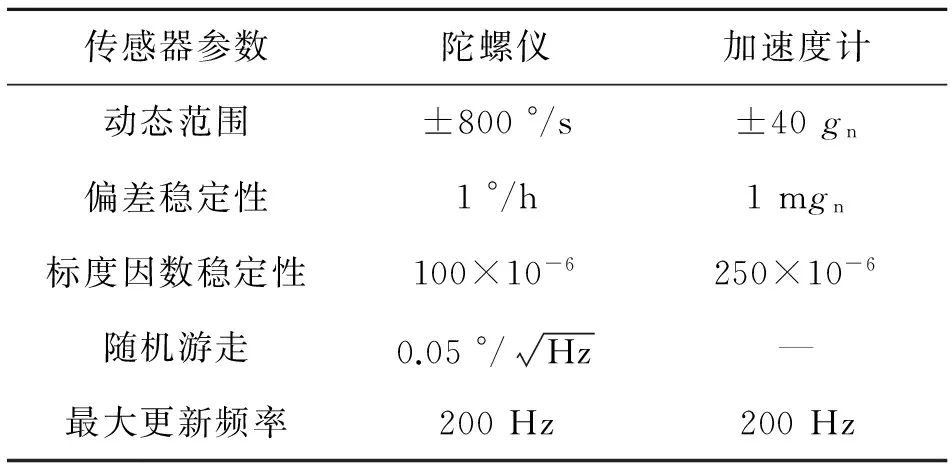
表2 陀螺仪与加速度计性能指标
由于惯性测量单元安装于转台测试中心,且实验过程中转台一直处于归零状态,因此参考基准提供的三维姿态角度值均为零。对比图9中不同解算方法提供的姿态曲线可看出,传统惯导解算得到的姿态角曲线有着明显的舒勒振荡周期,该结果符合惯导解算过程的误差特性;采用罗经方案得到的姿态角无振荡误差,特别是水平姿态角误差不发散且保持在零度左右;航向角经过7 h的实验,产生了航向偏离,但偏离程度远远小于传统惯导解算得到的结果。这是因为纯惯导模式下的组合系统处于无阻尼工作状态,由于重力加速度与水平回路的耦合引起传统惯导解算出的姿态信息中包含由舒勒、傅科周期在内的振荡性误差,这些误差是影响系统精度的主要因素。由于本文提出的无振荡误差姿态求取方案在求解载体姿态信息时利用重力矢量在惯性系下的慢漂特性间接地完成载体姿态的求取,不存在传统姿态解算时系统中的周期振荡回路,因此解算的载体姿态信息中不包含振荡性误差。
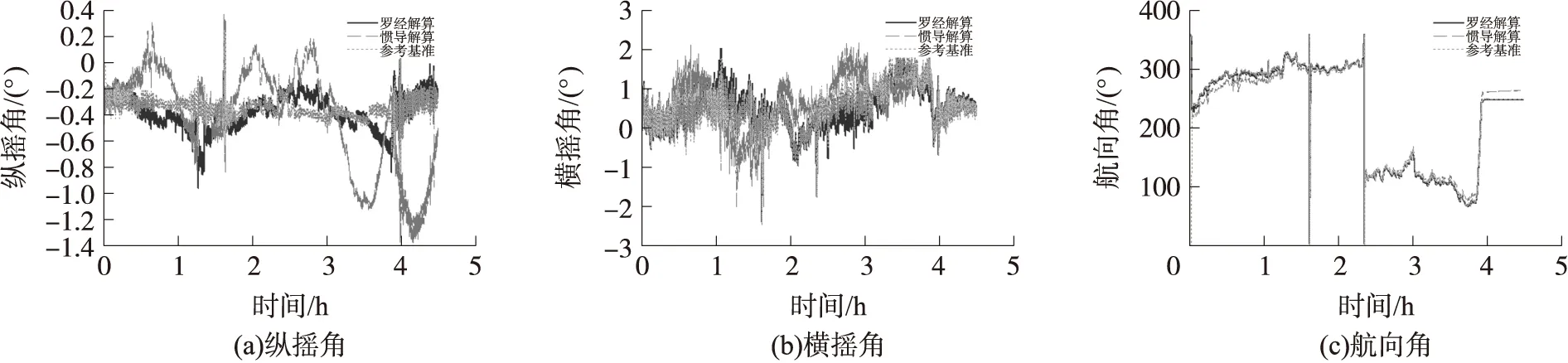
图11 载体运动状态下的姿态对比曲线
为进一步验证罗经方案姿态解算方法对于动态环境下的可行性,开展了4.5 h的户外行车实验。选取SPAN-LCI组合导航系统提供的姿态信息作为车载实验的参考基准(如图10),在GPS辅助条件下该系统提供的姿态角精度优于0.01°。

图10 车载实验平台
分别采用传统惯导解算与本文提出的无振荡周期姿态求取算法对陀螺仪和加速度计输出的标校后数据进行离线解算,将得到的载体姿态曲线与SPAN-LCI组合导航系统提供的参考姿态进行对比,得到试验曲线如图11所示。
对图11观测发现,传统惯导解算方案得到的姿态曲线显示出较为明显的周期振荡特性,特别是纵摇角和横摇角更为明显;采用基于罗经方案的无振荡周期姿态求取算法得到的姿态角曲线与参考基准具有较好的跟随性,且无振荡性误差。得到不同姿态解算方法求取的三维姿态曲线相对参考基准的最大偏离值如表3所示。
该结果可满足动态测绘对车体姿态精度要求;该实验结果验证了基于罗经方案的无振荡周期姿态求取方法在不同运动状态下具有较好的可靠性。
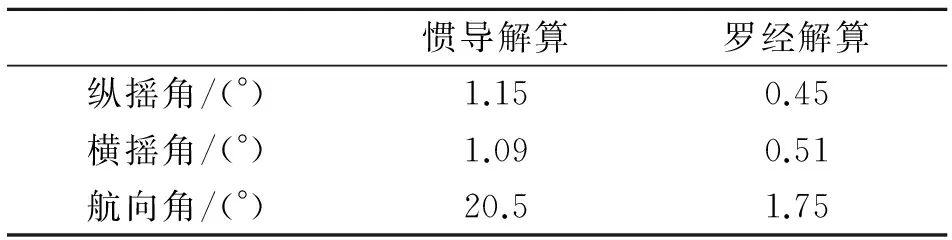
表3 不同姿态求取方法的最大偏离误差
4 结论
论文提出一种基于无振荡误差的测量载体姿态确定方法。该方法利用小波分解对加速度信息进行处理后得到相对纯净的重力矢量,间接地建立姿态矩阵完成对载体姿态信息的求取。该方法避免了纯惯导工作模式下系统中存在的周期振荡回路,因此解算的载体姿态信息中不存在周期振荡性误差。利用SPAN-LCI搭建实验平台分别开展实验室转台静基座实验和户外车载动态实验。在不同实验状态下,无振荡误差和传统惯导解算方法得到的载体姿态角分别与转台或SPAN-LCI组合系统提供的参考姿态信息进行对比,实验结果验证了论文提出的基于罗经方案的无振荡误差姿态确定方法具有较高的准确性和可靠性。
[1] 马万钟,杜清运. 地理国情监测的体系框架研究[J]. 国土资源科技管理,2011,27(6):104-111.
[2]麦照秋,陈雨,郑祎,等. IP-S2移动测量系统在高速公路测量中的应用[J]. 测绘通报,2010,12:23-26.
[3]Stutters L,Honghai L,Tiltman C,et al. Navigation Technologies for Autonomous under Water Vehicles[J]. IEEE Transactions on Systems,Man,and Cybernetics,2008,38(4):581-589.
[4]Timofeev E A,Tsekhanovich G S. INS Simulator for Debugging INS/GNSS Data[J]. IEEE Transactions on Aerospace and Electronic System,2009,24(1):38-40.
[5]柴艳菊. 挖掘信息提高GPS/INS导航精度的理论与方法研究[J]. 测绘学报,2010,39(3):328.
[6]Sun W,Gao Y. Fiber-Based Rotary Strapdown Inertial Navigation System[J]. Optical Engineering,2013,52(7):1-12.
[7]孙伟,李婉秋,初婧,等. 基于误差修正技术的井下人员MEMS定位方法[J]. 传感技术学报,2014,27(7):898-904.
[8]Levinson E,Willcocks M. The Next Generation Marine Inertial Navigation is Here Now[C]//Proceedings of IEEE Position,Location and Navigation Symposium. 1994:121-127.
[9]陈湾湾,陈智刚,马林,等. MEMS 微机械陀螺温度特性分析与建模[J]. 传感技术学报,2014,27(2):194-197.
[10]宋海宾,杨平,徐立波. MEMS传感器随机误差分析及处理[J]. 传感技术学报,2013,26(12):1719-1723.
[11]El-Sheimy N,Nassar S. Wavelet De-Noising for IMU Alignment[J]. IEEE Trans Aero Elec Sys,2004,10(1):32-39.
[12]Diniz S R,Silva A B,Netto R. Digital Signal Processing-System Analysis and Design[M]. Cambridge:Cambridge University Press,2002.
[13]Cho S Y,Kim B D. Adaptive IIR/FIR Fusion Filter and Its Application to the INS/GPS Integrated System[J]. Automatica,2008,44(8):2040-2047.

孙伟(1984-),男,教授,博士生导师,黑龙江萝北县人。2007年于哈尔滨工程大学获得学士学位,2011年于哈尔滨工程大学获得博士学位。主持国家级、省部级科研项目7项;发表学术论文40余篇,其中SCI论文6篇,EI论文20篇。长期从事惯性导航技术研究,sunwei-3775235@163.com;
丁伟(1992-),男,四川省巴中市人。现为辽宁工程技术大学测绘与地理科学学院硕士研究生。长期从事惯性数据处理方法研究。
AttitudeDeterminationMethodforVehicleINSwithoutOscillationError*
SUNWei*,DINGWei,YUTing,LIRuibao,YANHuifang
(School of Geomatics,Liaoning Technical University,Fuxin Liaoning 123000,China)
The GPS signal of integrated navigation system of moving measurement vehicle is easily disturbed by the work environment. The vibration errors of attitude was introduced when the integrated navigation system working on the inertial mode based on special undamped machinery. Therefore,it could not satisfy the requirement of accuracy attitude determination. Then,a novel attitude determination without oscillation error was proposed in this paper. The inertial frame was introduced firstly. Secondly,the acceleration in the inertial frame,proposed by accelerometer and filtered out by low-pass filter,was used to establish the transfer matrix from body frame to navigation frame. Then,the attitude could be calculated by the change of undamped calculation model. Experiment results showed that,the proposed advance strapdown gyrocompass could be used to calculate the vehicle platform attitude effectively.Keywords:mobile measurement;inertial navigation system;attitude;oscillation error
项目来源:国家自然科学基金项目(41304032);高等学校博士学科点专项科研基金项目(20132121120005);辽宁省科技厅博士启动基金项目(20121084);对地观测技术国家测绘地理信息局重点实验室开放基金项目(K201401)
2014-07-18修改日期:2014-10-27
TP212
:A
:1004-1699(2014)12-1666-06
10.3969/j.issn.1004-1699.2014.12.015
