认知无线电中移动认知用户功率控制方法
2014-09-02杨广龙谭学治
杨广龙,谭学治,王 孝
(哈尔滨工业大学通信技术研究所,150001哈尔滨)
认知无线电技术通过允许认知用户智能感知和随机接入授权用户空闲的频谱来提高频谱利用率,让频谱资源稀缺的现状得以缓解[1-4].通常,认知无线电根据频谱复用方式被分为3类:填充式(Overlay)、下垫式(Underlay)、交织式(Interweave).在填充式共享中用户伺机接入频谱空穴,对授权用户的干扰较小[5-6];在下垫式共享中, 认知用户受到授权用户“干扰容限”的严格约束,但频谱利用率较高,认知用户通过降低发射功率避免对授权用户的干扰[7-9].
图1所示的认知无线电通信模型,认知用户工作在下垫式频谱共享模型下,认知用户为可移动用户.图中的a、b、c3个圆分别代表认知用户采用不同的功率控制算法时认知用户发射功率的覆盖范围,PRx为授权用户、CTx为认知用户发射单元、CRx为认知用户接收单元.从图中可以看出,当采用a功率控制算法时不但避免了对授权用户的干扰,同时也降低了系统能耗.当认知用户为移动用户时,减小能耗就能增加移动用户的使用时间,在实际应用中非常关键.

图1 一个授权用户,两个认知节点的共存式频谱共享模型
在公共网络和点对点无线网络中,功率控制问题被广泛的研究[10-13],在global system for mobile communications(GSM)功率控制方法中,1800 M手机具有15个功率级别步长,每个功率级别差2 dB,GSM基站通过下行SACCH信道控制手机采用不同的发射功率级别[14-15],GSM中采用的固定步长的功率控制算法能够简单有效的对移动用户进行功率控制,同时也起到节能的作用.
近几年认知无线电中的功率控制问题也成为研究的热点[5-9].文献[16]讨论了填充式模型下通过多跳方式节约能耗的问题,但是没考虑下垫式模型.利用下垫式模型能够提高频谱利用率,避免对授权用户造成干扰[5],同时降低认知用户的能耗.文献[17]只简单的从几何学的观点上描述了认知用户功率辐射区域,并没有考虑功率控制问题,而且假设的认知用户的位置是固定不变的,并没有考虑认知用户的移动性.文献[18]研究了认知用户的功率约束问题,提出授权用户可以正常通信的信噪比(SNR),以此调节授权用户的发射功率.文献[19]研究了在Ad hoc网络下授权用户和认知用户通信的吞吐量问题,发现当认知用户密度比授权户密度大时,两种网络下吞吐量的变化规则是一样的.但是并没有深入分析授权用户传输半径、认知用户数目之间的相互关系.文献[20]利用马尔科夫不等式,推导出认知用户传输半径范围,分析了不同认知用户密度下,授权用户吞吐量和传输半径之间实际作用关系.传统算法认知节点间采用固定发射功率,认知节点并没有功率控制能力[21].针对上述问题,本文在前人研究的基础上进行改进,提出基于移动用户的移动距离和运动矢量方向的自动功率控制算法automatic power control-distance vector(APCDV).本文功率控制算法目的如下:
1)在下垫式频谱共享模型下,认知用户具有可移动性,且移动过程中不会对授权造成干扰;
2)认知用户在保证通信质量的前提下,采用最优发射功率,降低能耗.
1 系统模型和问题描述
图1中假设CTx的位置为坐标原点,CTx到PRx的直线距离为r1,CTx到CRx的直线距离为r2,在两径传输模型下,接收信号功率可以表示为

其中Pr为接收信号功率,Pct为CTx的发射功率,Gt和Gr分别为发射和接收天线的增益,ht和hr分别为发射和接收天线的高度,d为发射端和接收端之间的距离,α为路径损耗参数.
定义授权用户的干扰功率门限为Pth,认知接收用户的最小接收功率门限为Sth.满足如下条件:

式中:Prc为CTx的发射功率经过路径损耗后实际到达认知用户接收端的功率;Prp为CTx的发射功率经过路径损耗后实际到达授权用户的功率;和分别为CTx所允许的最小和最大发射功率.
假设接收和发射天线的增益和高度分别相同,由此可分别得到PRx、CRx处的接收信号功率为

假设PRx、CRx位置固定不变.
定义1静态场景
CTx位置不变的场景.
定义2动态场景
CTx以某个速率进行移动的场景.
1.1 静态场景下功率控制算法
静态场景下,CTx相对于PRx、CRx的位置固定不变,在本文中假设每个节点可通过全球定位系统(GPS)或者其他的定位算法获得自己的位置信息,每个节点能够通过一个通用的控制信道与相邻节点交互位置信息.功率控制流程如下:
1)根据已更新的位置信息计算r1,r2.
2)根据式(2)和(3)计算Prp,Prc.
5)如果Prp>Pth,发射功率调节到最小值后迭代增加认知用户发射功率,在发射功率迭代增加过程中:
8)如果Prc<Sth与Prp>Pth同时成立,关闭认知用户发射.
1.2 单授权用户动态场景下功率控制算法
单授权用户动态场景只存在1个授权用户.PRx、CRx的位置固定不变,CTx以某个速率移动.根据CTx的运动趋势讨论动态场景下的功率控制算法.
图2所示的通信场景中,假设CTx初始位置为坐标原点,CTx的运动方向在X、Y平面上存在4个区间8个方向,分别为d1~d8,其中d2、d4、d6、d8可以为此区间内的任意方向.

图2 动态场景下CTx以d3方向运动
以d3运动方向为例讨论动态场景下功率控制算法.图2中假设d3与PRx、CRx的连线垂直,CTx按照d3运动方向t时刻的运动距离为Δh,r11和r22分别为t时刻CTx与PRx、CRx的直线距离,θ1为r1与d3运动方向的夹角;θ2为r2与d3运动方向的夹角,可得下式:
将式(4)和(5)分别代入式(2)和(3)可得

式(6)和(7)需要满足式(1)的要求,可得

由于式(6)和式(7)中PtGtGrh2th2r相同,可得

式(8)中r1,r2,cosθ1,cosθ2为已知,假设CTx的发射功率刚好满足CRx的接收要求,即CTx的发功率经过路径损耗后等于Prc,可以看出,公式(10)中Prp的值由Δh决定,说明Prp为Δh的函数,可以用下式表示:

由于d3的运动方向固定,所以θ1和θ2为固定值,由开篇的假设可知r1与r2的值已知、Sth与Pth值已知;Gt和Gr的增益相同且已知,ht和hr的高度相同且已知,可得Sth/GtGrh2th2r与Pth/GtGrh2th2r为定值,所以通过式(8)和(9)可以得出Pct为Δh的函数,可以用下式表示:

上述讨论是基于CTx的运动方向不变的情况.假设CTx从坐标轴原点出发,向不同的方向运动,如图2所示的8种运动方向,可以看出公式(8)和(9)函数中的θ1和θ2发生了改变,Pct成为cosθx的函数,可以用下式表示:

图2中的运动方向都为矢量方向,当运动方向与矢量方向相同时定义Δh>0,当运动方向与矢量方向相反时定义Δh<0.
从式(8)可以看出,Δh>0时,θ2在[0,π]区间内,Pct函数为单调递增函数;θ2在[π,2π]区间内,Pct函数为单调递减函数.Δh<0时,θ2在[0,π]区间内,Pct函数为单调递减函数;θ2在[π,2π]区间内,Pct函数为单调递增函数.θ2=0、θ2=π、θ2=2π分别为函数s(cosθ2)的拐点.
1.3 多授权用户动态场景下功率控制算法
多授权用户动态场景存在多个授权用户.图3中存在多个授权用户,假设每个授权用户的干扰门限相同Pth1=Pth2=…=Pthn.
定义3max(Prpn)即为max{Prp1,Prp2,Prp3,…,Prpn},Prpn为授权用户接收到的来自认知用户的干扰功率.max(Prpn)即计算所有授权用户中受到干扰最大者.

图3 通信场景(多个授权用户)
在图3中,假设max(Prpn)的授权用户为PRx2,可以有如下结论:
1)如果CTx不会对PRx2造成干扰,那么CTx必然不会对其他授权用户造成干扰;
2)如果CTx对PRx2造成了干扰,那么CTx将立即关闭发射;
3)随着认知发射用户位置的改变,max(Prpn)的值随时间发生变化.
利用以上结论对图4的通信场景进行简化,假设:
(a)时刻1,max(Prpn)的授权用户为PRx2,可以简化为只有PRx2、CTx、CRx的场景,即图1场景;
(b)时刻2,CTx朝某个方向运动后,max(Prpn)的授权用户为PRx3,也可以简化为只有PRx3、CTx、CRx的场景,即图1场景;
(c)考虑特殊情况,当CTx朝某个方向运动后,可能导致max(Prpn)的授权用户有多个,也可以按照(a)和(b)的方式简化,因为如果此时CTx静止不动,简化后的通信场景只保留1个认知用户即可;如果此时CTx朝某个方向运动,就必然打破这种特殊情况,所以上述的通信模型简化方法依然有效.
经过上述分析,图3的通信场景可以简化成图1的通信场景,把看似复杂的通信场景进行归一化处理,利用通用简单的通信模型来讨论功率控制问题.
2 算法仿真及分析
本文假设认知用户为车载移动设备,认知用户以不同速率移动;通信环境无明显障碍物,所有信道增益系数均服从瑞利分布.仿真所用参数如表1所示.

表1 仿真参数
假设CTx以速率ϑ匀速运动,CTx的运动方向每ts改变一次,其中t在0到50 s的整数集合内取值,CTx平均速率可以为10,20,30,40,50 m/s,运动方向夹角θ以2π为周期,其中,当θ取0,π,2π时为函数的拐点.CTx的初始坐标为(0,0),PRx的初始坐标为(-4,4),CRx的初始坐标为(3,4),CTx每秒钟更新位置信息.
上文已经推导出Pct为Δh和cosθx的函数,如式(12)和(13),功率控制算法仿真结果如图4所示,当CTx运动趋势与矢量方向相同时(即Δh>0时),θ2在[0,π]区间内,CTx的发射功率为单调递增函数,由于CTx的发射功率避免造成对PRx干扰,所以其发射功率不能任意增加,当增加到45.4 W时,CTx停止发射;θ2在[π,2π]区间内,CTx的发射功率为单调递减函数,CTx的发射功率逐渐减小,当Δh=5 km时,CTx与CRx的距离最短,此时的CTx的发射功率也是最小.
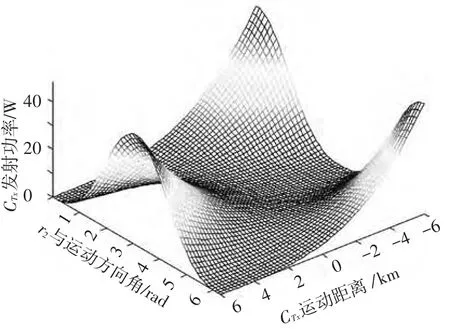
图4 认知用户发射功率
当CTx运动趋势与矢量方向相同时(即Δh<0时),θ2在[0,π]区间内,CTx的发射功率为单调递减函数;θ2在[π,2π]区间内,CTx的发射功率为单调递增函数,由于CTx的发射功率避免造成对PRx干扰,所以其发射功率不能任意增加,当增加到45.4 W时,CTx停止发射;θ2=0、θ2=π、θ2=2π分别为函数s(cosθ2)的拐点.
图5假设CTx沿着d3方向或者d7方向运动时,发射功率曲线与PRx接收到的干扰功率之间的关系,当CTx沿着d3方向运行时,CTx与CRx的距离先变小后增加,在此运动轨迹下4 km为CTx与CRx的最短距离.当CTx沿着d7方向运行时,CTx与CRx的距离逐渐增加.CTx与PRx距离变化趋势也是如此.CTx的发射功率随着运动距离的改变而改变.当考虑PRx的干扰,CTx会存在禁发区,图5中实心点表示的即为CTx的禁发区域.

图5 采用功率控制算法发射功率和干扰功率对照
图6表示的是CTx采用不同功率控制算法时的总能量值.本图假设CTx以速率ϑ=50 m/s匀速沿着d3方向运行,运动距离Δh=8 km.假设在这段区间内,认知用户不会对授权用户造成干扰.固定步长功率控制算法是采用文献[21]中算法,假设认知用户功率分为1500级步长(0~1500),认知用户根据接收门限(不通过基站下行SACCH信道控制)自动选择不同级别发射功率.图中显示了固定步长功率控制算法和APC-DV算法的总能耗,当采用固定步长功率控制算法时,由于受功率级别的限制,用户需要在不同固定功率上保持,虽然已经增加了步长的级数(步长级数越多,功率控制越精确,节约能耗),但也存在能耗浪费.由上图可以看出,当Δh=3 km时,APC-DV算法与采用固定步长的功率控制算法相比节约能耗已经达到20%.而且随着Δh的增加,APC-DV算法节能效果更加明显.

图6 不同功率控制算法下CTx总能耗
图7中假设CTx的初始坐标为(0,0),PRx的坐标为(-4,4),CRx的坐标为(3,4).假设CTx从原点以10 m/s的速率出发,每1 km停4 s,CTx首先从(0,0)位置出发,先到达(0,1)位置并停留4 s然后继续按照箭头方向运动,最后回到(0,0)点,运动轨迹如图7所示.

图7 CTx运动轨迹
CTx按照图7的轨迹运动时,功率控制算法需要考虑三方面问题:
1)CTx的发射功率不能对授权用户造成干扰;
2)CTx的发射功率要保证认知用户正常通信;
3)以上述两个条件为前提,CTx的能耗降为最低.
图8(a)为CTx功率控制曲线,图8(b)为CTx的发射功率对PRx造成的干扰曲线.当CTx的发射功率已经对授权用户造成了干扰,而且如果降低发射功率认知用户将不能正确接收到CTx的信息,所以此时CTx关闭发射.CTx在运动过程中随时更新位置信息,当CTx的发射功率可以满足认知用户接收的同时也不会对授权用户造成干扰时,CTx启动发射.
3 结 论
本文提出基于下垫式频谱共享的移动认知用户的功率控制方法.通过对多通信场景的分析,简化了物理模型.根据认知用户的移动性,公式化的分析了授权用户所受干扰与认知用户移动距离和运动矢量方向间的关系,实现了授权用户所受干扰的实时预测.本文以授权用户干扰容限和认知用户接收门限为约束条件,采用最小发射功率准则实时、高效的对认知用户的功率进行控制.本文提出的APC-DV算法与采用固定步长的功率控制算法相比能够节约能耗20%.
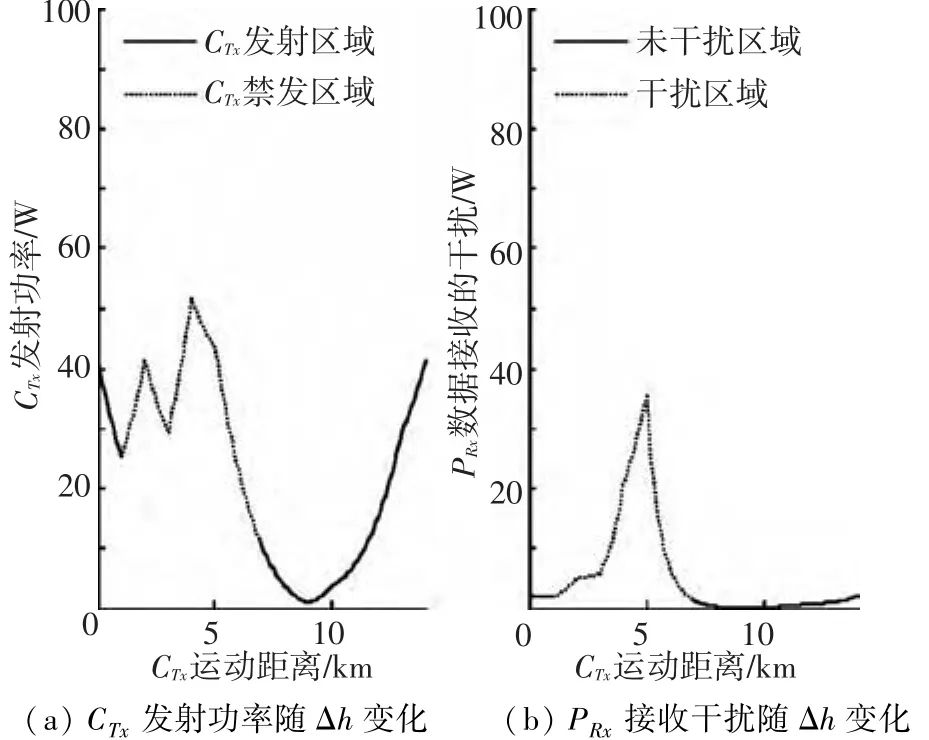
图8 CTx运动轨迹变化时功率控制曲线
[1]Federal Communications Commission.Facilitating opportunities for flexible,efficient,and reliable spectrum use employing cognitive radio technologies[R].Washington:FCC,2003:03-08.
[2]MCHENRY M A.NSF spectrum occupancy measurements project summary[EB/OL].http://www.sharedspectrum.com.2005-08.
[3]MITOLAJ.Cognitive radio:an integrated agent architecture for software defined radio[D].Stockholm:KTH Royal Institute of Technology,2000:45-48.
[4]HAYKIN S.Cognitive radio:brain-empowered wireless communications[J].IEEE Journal on Selected Areas in Communications,2005,23(2):201-220.
[5]QI Qu,MILSTEIN L B,VAMAN D R.Cognitive radio based multi-user resource allocation in mobile Ad Hoc networks using multi-carrier CDMA modulation[J].Selected Areas in Communications,IEEE Journal on,2008,26(1):70-82.
[6]NCEL J,REED J H,GILLES R P.Convergence of cognitive radio networks[C]//WCNC 2004:Proceedings of 2004 IEEE Wireless Communications and Networking Conference.Piscataway:IEEE Press,2004:2250-2255.
[7]ZHOU Pan,YUAN Wei,LIU Wei,et al.Joint power and rate control in cognitive radio networks:A game theoretical approach[C]//Proceeding of IEEE ICC 2008 China Forum.Beijing:The Organizing Committee of the 2008 World Communication,2008:3296-3301.
[8]WANG J,TAN Xuezhi,LIU Yutao.Power control algorithm based on game theory in cognitive radio networks[J].Science Technology and Engineering,2009,9(19):5680-5683.
[9]HOANG A T,LIANG Yingchang.Maximizing spectrum utilization of cognitive radio networks using channel allocation and power control[C]//IEEE Vehicular Technology Conference.Montreal:IEEEVTC-Fall,2006:1202-1206.
[10]HUANG JianWei,BERRY R A,HONING M L.Distributed interference compensation for wireless networks[J].Selected Areas in Communications,IEEE Journal on,2006,24(5):1074-1084.
[11]SARAYDAR C U,MANDAYAM N B,GOODMAN D J.Efficient power control via pricing in wireless data networks[J].IEEE Transactions on Communications,2002,50(2):291-303.
[12]KOSKIE S,GAJIC Z.A nash game algorithm for SIR-based power control in 3 G wireless CDMA networks[J].IEEE/ACM Transactions on Networking,2005,13(5):1017-1026.
[13]MACKENZIE A B,WICKER S B.Game theory in communications:Motivation,explanation,and application to power control[C]//IEEE Global Telecommun.Conf.Washington,DC:IEEE Computer Society,2001:821-826.
[14]李群,周亮,李武龙,等.GSM功率控制的几种场景运用[J].移动通信,2010(12):1-6.
[15]周丹.基于GSM系统的功率控制技术研究和实现[D].广州:华南理工大学,2011:24-47.
[16]SHI Y,HOU Y T.Optimal power control for multi-hop software defined radio networks[C]//26thIEEE International Conference on Computer Communications.Anchorage,AK:IEEE INFOCOM,2007:1694-1702.
[17]WANG Lichun,CHEN Anderson.Effects of location awareness on concurrent transmissions for cognitive Ad Hoc networks overlaying infrastructure-based systems[J].IEEE Transactions on Mobile Computing,2009,8(5):577-589.
[18]HOVEN N,SAHAI A.Power scaling for cognitive radio[C]//2005 International Conference on Wireless Networks,Communications and Mobile Computing.Maui:IEEE Computer Society,2005:250-255.
[19]JEON S W,DEVROYE N,VU M,et al.Cognitive networks achieve throughput scaling of a homogeneous network[J].IEEE Transactions on Information Theory,2011,57(8):5103-5115.
[20]廖勇,杨士中,陈徐洪,等.认知网络主用户吞吐量受限下的传输半径分析与仿真[J].电子与信息学报,2012,34(1):1-6.
[21]BEHZAD A,RUBIN I.Impact of power control on the performance of the ad hoc wireless networks[C]//IEEE International Conference on Computer Communications.Miami:INFOCOM,2005:102-113.
