基于半经验模型的水深反演及不同水深范围的误差分析*1
2014-08-30许海蓬马张靖宇
许海蓬马 毅,梁 建,张靖宇
(1.山东科技大学 测绘学院,山东 青岛 266590;2.国家海洋局 第一海洋研究所,山东 青岛 266061)
基于半经验模型的水深反演及不同水深范围的误差分析*1
许海蓬1,2马 毅2*,梁 建2,张靖宇2
(1.山东科技大学 测绘学院,山东 青岛 266590;2.国家海洋局 第一海洋研究所,山东 青岛 266061)
基于半经验遥感模型,开展广东省雷州湾SPOT-5影像不同水深范围的遥感反演及误差分析,给出不同模型对应的最佳水深范围和不同水深范围的最佳反演模型,结果如下:红光单波段模型、红光-绿光双波段模型、绿光-红光-近红外三波段模型均在2~5 m水深范围内反演误差最小,分别为16.7%,13.2%和17.1%。0~2 m水深范围内,红光-近红外双波段模型反演误差最小,为34.3%;2~5 m水深范围内,红光-绿光双波段模型反演误差最小,为13.2%;5~10 m水深范围内,红光-近红外双波段模型反演误差最小,为19.3%;10~20 m水深范围内,三波段模型反演误差最小,为31.5%。
遥感;水深反演;误差分析;雷州湾
水深遥感反演模型主要包括物理模型[1-2]、半经验模型[3-7]和统计模型[8-10]。三种模型中,半经验模型既具有物理意义,又具有计算简便的优点,因而得到广泛的应用。
水深半经验遥感模型的反演误差分析是其结果能否投入使用的前提,国内外很多学者开展相关研究。例如:基于Landsat-TM数据,分析了主成分分析、多元线性回归等四种反演方法的绝对误差[11];针对中等浑浊度水体,基于SPOT影像开展了反演误差分析[3];将Landsat和SPOT两种不同源、不同空间分辨率影像的水深反演误差进行比较分析[4],开展针对半经验模型水深遥感反演的误差分析[5,12];还有学者开展基于Landsat数据的底质分区、比值、线性和指数等模型的反演误差分析[13-14]。然而上述工作对于不同水深范围的反演误差分析,还没有开展相关的研究。
基于半经验遥感模型,以广东省雷州湾SPOT-5影像为例,依据海图等深线的设置,开展0~2,2~5,5~10和10~20 m四个不同水深范围的反演误差分析,并且在此基础上,分析不同水深范围的最佳反演模型和不同模型对应的最佳水深范围。
1 研究区及数据源
1.1 研究区
雷州湾位于广东西部雷州半岛东侧,为湛江市、海康县、徐闻县共属,雷州湾北邻湛江港,南至徐闻县,是广东省重要的水上交通要道。湾宽约40 km,最大水深30 m,面积1 690 km2,岸线长度240 km,周边工业发达,沿岸耕地众多,盛产甘蔗、木薯和菠萝等。

图1 研究区域图示Fig.1 Location of the study area
1.2 数据源
研究使用的是SPOT-5遥感影像,获取时间为2006-11-03T11∶06∶16(北京时间),其设置有空间分辨率为10 m的绿光、红光和近红外等波段,研究区多光谱影像如图2所示。水深测量数据使用的是海军航保部公开出版的1∶120 000海图,以300 dpi进行数字化扫描,如图3所示。

图2 SPOT-5卫星影像(R4G3B2组合)Fig.2 SPOT-5 satellite image

图3 海图数据Fig.3 The data of chart
2 数据预处理
2.1辐亮度转换
原始影像的灰度值(DN值)是没有任何量纲的数字表达形式,只有将其转换为传感器入瞳处的辐射亮度值或温度值等等,才可以进行遥感应用。本研究结合影像元数据中的增益(Gain)和偏置(Bias)信息,应用SPOT-5辐亮度转换公式,如式(1),对原始图像的灰度值进行转换,计算出辐射亮度值。
L=DN/Gain+Bias
(1)
式中,L为传感器的入瞳辐射亮度值;DN为图像的灰度值;Gain,Bais分别为图像的增益和偏置值。
2.2 几何校正
几何校正包括:多光谱遥感影像和扫描海图的几何校正。
1)多光谱遥感影像采用实地采集的亚米级控制点开展几何校正,考虑到研究区域相对比较平坦,采用二次多项式校正模型开展,独立检验点均方根误差为1.8像素;
2)海图经扫描数字化后,采用海图上的经纬网交叉点开展逐格网几何校正,独立检验点均方根误差为1.1像素。
2.3 潮汐校正
根据影像获取时间,结合附近港口—湛江港的潮汐信息,通过查找2006年潮汐表,确定当时潮高值是324 cm。潮汐表的潮高基准面和海图的理论深度基准面一致,均为平均海平面下180 cm。因此,影像获取时的水深等于海图上的水深值加上当时的潮高。
3 水深遥感反演模型
水深遥感反演采用的是Lyzenga提出的半经验遥感模型[6]:
Li=Lsi+CiRbie-fkiz
(2)
式中,i为波段号;Li为传感器的入瞳辐亮度;Lsi为深水区的传感器入瞳辐亮度;Ci为太阳辐照度在大气和水体界面的传输系数;Rbi为底质反射率;f为几何光程长度,一般情况下,取常量值2;ki为漫衰减系数;z为水深。
基于上述表达式,得出线性关系式:
(3)

上述线性关系式,即是本研究水深半经验反演模型的理论依据。
4 水深遥感反演试验
4.1 水深控制点选取
对照海图标示的水深值,查找影像各波段对应像元的辐射亮度值,提取水深控制点,分布如图4所示。

图4 水深控制点分布图Fig.4 The distribution of bathymetry control points
4.2 大气校正
大气校正采用暗目标法,但通常人为主观的选择图像的暗目标会对结果造成很大的误差。本次研究中,采集多个暗目标点,主要是排除或降低人为主观因素等造成的误差。
4.3 反演模型参数计算
本研究中,使用SPOT-5影像绿光、红光、近红外波段建立3个单波段模型、3个双波段模型和1个三波段模型,利用提取水深控制点的属性信息(影像各波段辐射亮度值和水深),对水深遥感反演模型的参数进行回归,结果如表1所示。

表1 单波段、双波段和三波段组合的回归参数Table 1 The regress parameters for the single band,the double band and the three band models
注:空白表示无数据
4.4 水深遥感反演结果
将得到的回归参数,代入反演模型,得出反演结果,如图5所示。
5 误差分析
计算反演水深的平均相对误差,结果如表2所示,不同水深范围的平均相对误差如图6所示。

表2 水深反演结果的平均相对误差Table 2 The relative average errors of bathymetry inversion results
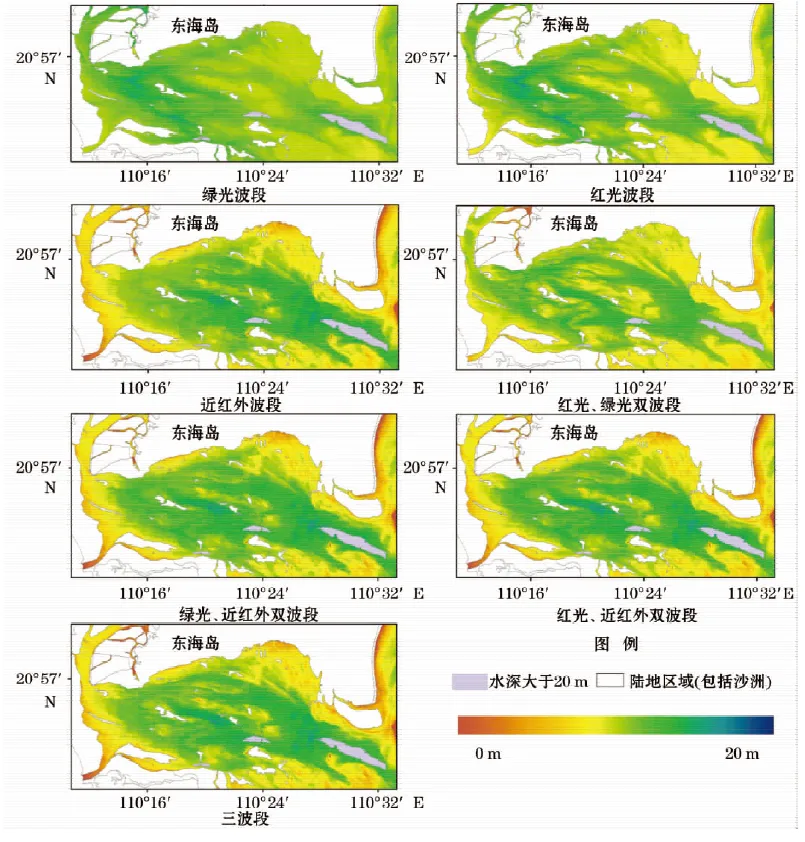
图5 不同波段模型的水深反演结果Fig.5 The bathymetry inversion results from the models with different bands
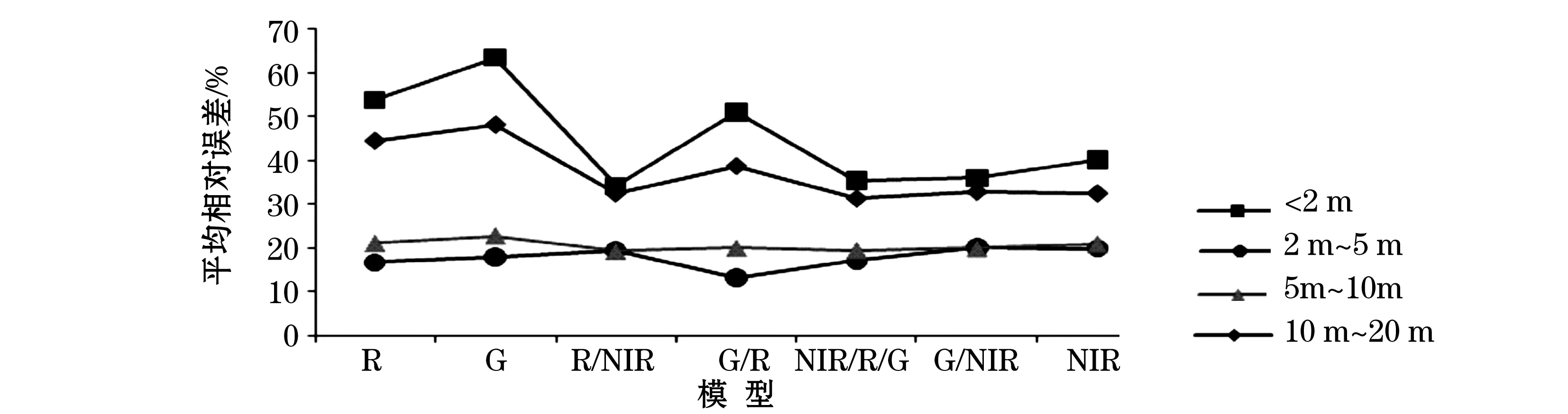
图6 不同水深范围的平均相对误差Fig.6 The relative average error of different water depth range
红光单波段模型、红光-绿光双波段模型、绿光-红光-近红外三波段模型均在2~5 m水深范围内反演误差最小,分别为16.7%,13.2%和17.1%。原因分析如下:2 m以浅的区域位于波浪破碎带,其水深遥感反演易受其影响,且波浪会导致水体中泥沙含量增加,这样一来,光在水表面的反射和水体中的散射可能导致反演误差的增大;另一方面,由于水深较浅,底质信号在总信号中占了很大比例,也会导致反演误差的增大。5 m以深的区域返回的信号较弱,影响了水深遥感反演模型的结果。
0~2 m水深范围内,红光-近红外双波段模型反演误差最小,为34.3%;2~5 m水深范围内,红光-绿光双波段模型反演误差最小,为13.2%;5~10 m水深范围内,红光-近红外双波段模型反演误差最小,为19.3%;10~20 m水深范围内,三波段模型反演误差最小,为31.5%。各水深范围的反演误差最小对应的均是双波段模型或三波段模型,一定程度上说明双波段和三波段模型可以排除底质和环境等因素的影响。
6 结 论
本研究基于半经验遥感模型,以广东省雷州湾SPOT-5影像为例,结合海图等深线设置,开展0~2,2~5,5~10和10~20 m四个不同水深范围的反演误差分析结果表明:0~2 m水深范围内,红光-近红外双波段模型反演误差最小,为34.3%;2~5 m水深范围内,红光-绿光双波段模型反演误差最小,为13.2%;5~10 m水深范围内,红光-近红外双波段模型反演误差最小,为19.3%;10~20 m水深范围内,三波段模型反演误差最小,为31.5%。此外,4个不同水深范围内,2~5m反演结果最佳,平均相对误差最小,为13.2%。
[1]LEE Z P,CARDER K L,MOBLEY C D,et al.Hyperspectral remote sensing for shallow waters[J].Applied Optics,1998,37 (27):6329-6338.
[2]YANG D T.Detection of Seagrass in optical shallow water with Quickbird in Xincun Bay of Hainan province,China[J].International Workshop on Imaging Systems and Techniques,2011,5(5):363-368.
[3]LAFON V,FROIDEFOND J M,LAHET F,et al.SPOT shallow water bathymetry of a moderately turbid tidal inlet based on field measurement[J].Remote Sensing of Environment 2002,81:136-148.
[4]刘善伟.浅海水深遥感反演与海岸线判绘方法及其系统集成研究[D].北京: 中国科学院研究生院,2011.
[5]曹瑞雪,张 杰,孟俊敏.利用TM图像数据计算海水深度模型——以双子礁和黄河口水域为例[J].海洋科学进展,2004,22: 65-70.
[6]LYZENGA D R.Passive remote sensing techniques for mapping water depth and bottom features[J].Optical Society of America,1978,17 (3):379-383.
[7]PHILPOT W D.Bathymetric mapping with passive multispectral imagery[J].Optical Society of America,1989,28 (8):1568-1578.
[8]STOVE G C.Use of high resolution satellite imagery in optical and infrared wavebands as an aid to hydrographic and coastal engineering[C]∥Proceedings conference on Electronics in Soil and Gas.London:1985: 509-530.
[9]HENGLE W V D.Multi-temporal water depth mapping by means of Landsat TM[J].International Journal of Remote Sensing,1991,12(4):703-712.
[10]SANDIDGE J C.HOLYER R J.Coastal bathymetry from hyperspectral observation of water radiance [J].Remote sensing of Environment,1998,65(3):341-352.
[11]LICEAGA-CORREA M A.EUAN-AVILA J I.Assessment of coral reef bathymetric mapping using Landsat Thematic Mapper data [J].INT.J.Remote Sensing,2002,23(1): 3-14.
[12]党福星,丁谦.多光谱浅海水深提取方法研究[J].国土资源与遥感,2001,4: 53-58.
[13]党福星,丁谦.利用多波段卫星数据进行浅海水深反演方法研究[J].海洋通报,2003,22(3):55-59.
[14]王晶晶,田庆久.基于TM遥感图像的近海岸带水深反演研究[J].应用技术,2006,6:27-30.
BathymetryInversionBasedonSemi-EmpiricalModelandErrorAnalysisofDifferentWaterDepthRanges
XUHai-peng1,2,MAYi2,LIANGJian2,ZHANGJing-yu2
(1.ShandongScienceandTechnologyUniversity,Qingdao 266590,China;2.TheFirstInstituteofOceanography,SOA,Qingdao 266061,China)
Remote sensing inversions of different water depth ranges and their error analysis are made for SPOT-5 image in the Leizhou Bay,Guangdong Province,by using a semi-empirical model.The best water depth ranges corresponding to different models and the best inversion models for different water depth ranges are presented.The results show that in the depth range from 2 to 5m,the red light single band model,the red-green dual band model and the green-red-near-infrared three band model all have a minimum retrieval error of 16.7%,13.2% and 17.1%,respectively.In the depth range from 0 to 2m,the red-near-infrared dual band model produces a minimum retrieval error of 34.3%.In the depth range from 5 to 10m,a minimum retrieval error of 19.3% is obtained by using the red-near-infrared dual band model.In the depth range from 10 to 20m,the minimum retrieval error from the green-red-near-infrared three band model is 31.5%.
remote sensing; bathymetry inversion; error analysis; Lei Zhou Bay
2013-08-27
国家科技支撑计划项目——远海岛礁地理信息监测关键技术研究与示范(2012BAB16B01-02)
许海蓬(1987-),男,硕士研究生,主要从事海岛海岸带遥感方面研究.E-mail:xuhaipeng307@163.com
*通讯作者,E-mail:mayimail@fio.org.cn(张 骞 编辑)
TP79
A
1002-3682(2014)01-0019-07
