城市机载LiDAR测图平台研究与实现
2014-08-15王磊
王 磊
(广州市城市规划勘测设计研究院,广东 广州 510060)
一、引 言
随着广州市新型城市化发展实现大跨越、国家中心城市功能全面增强,以及城乡一体化建设飞速发展,城市规划特别是郊区与乡村的规划凸显重要和紧迫,对地理数据的快速获取和现势性要求也越来越高。目前,采集大比例尺数字线划图的技术手段主要依靠大量的外业数据采集和人工分析处理工作,已明显无法满足大面积、快速、高精度产品的生产需求。激光雷达(light detection and ranging,LiDAR)技术集激光测距技术、计算机技术、惯性测量单元(IMU)、差分定位技术(DGPS)于一体,其在三维空间信息的实时获取方面产生了重大突破,为获取高时空分辨率地球空间信息提供了一种全新的技术手段,使传统的人工单点数据获取变为连续自动数据获取,使数据处理的自动化、智能化成为可能。
目前对LiDAR 数据处理的大部分研究集中于数据的滤波和分类,而针对不同地形条件的自适应性、自动化算法仍处于初步探讨阶段[1]。本文以广州市从化测区机载LiDAR 系统1∶2000、1∶5000地形成图为例,研制机载LiDAR测图平台,并在从化测区1985 km2的1∶2000、1∶5000地形图测制中得到实际应用。
二、机载LiDAR获取后数据特征
LiDAR测图系统所包括的数据主要有数字正射影像(DOM)、数字表面模型(DSM)、数字高程模型(DEM)、分类的激光点云(point cloud)。
1. 数字正射影像
数据主要特征如下:
1) 地面分辨率:1∶2000的为0.2 m,1∶5000的为0.5 m;数据格式为*.tif;分幅尺寸:1∶2000 的为1000 m×800 m(四周需外扩20m重叠区域),1∶5000的为2000 m×2000 m(四周需外扩100 m重叠区域);影像定位,DOM数据起始点为左上角像元中心点对应的广州平面坐标。
2) 数据的栅格坐标位于像元中心点,影像值是每一个栅格中心代表的值;影像色彩模式为24位(比特);影像无噪声、污点、划痕。
2. 地面表面模型
数据主要特征如下:地面分辨率为1 m;数据格式为*.bil;分幅尺寸为1000 m×800 m;数据存储,应由起始格网点起,按从西向东,由北向南的顺序排列;空白区域在所获取高程数据源出现局部中断的情况下使用,位于空白区域的格网应赋予高程值-9999(对空白区的处理有记录)。
3. 数字地面模型
数据主要特征如下:地面分辨率,1∶2000的为1 m,1∶5000的为2.5 m;数据格式为*.bil;分幅尺寸,1∶2000的为1000 m×800 m,1∶5000的为2000 m×2000 m;数据存储,应由起始格网点起,按从西向东、由北向南的顺序排列;空白区域在所获取高程数据源出现局部中断的情况下使用,位于空白区域的格网应赋予高程值-9999(对空白区的处理有记录)。
4. 点云数据
点云是在同一空间参考系下表达目标空间分布和目标表面光谱特性的海量点集合。激光雷达系统扫描获取的数据,从严格意义上讲,包括位置、方位/角度、距离、时间、强度等各种数据。但实际应用中,人们接触和使用的是与具体时间及发射信号波长一一对应的点坐标及强度等。与城市LiDAR测图平台影像数据相比,点云数据在内容、形式等方面具有很多自身的特点。数据主要特征如下:点密度,1∶2000的为1~4个/m2,1∶5000的为1/4~1个/m2;数据格式为*.coo(包含x、y、z、颜色RGB、反射强度F等信息)。
三、城市LiDAR测图平台主要功能
城市LiDAR测图平台基于笔者所在单位原有1∶2000、1∶5000成图模板与数据标准,并采用功能模块化的方式开发,快速搭建可供实际生产的应用系统,大大缩短了开发交互式测图软件的开发周期和作业员的培训周期,同时保证了软件系统的质量。城市LiDAR测图平台主要功能见表1。
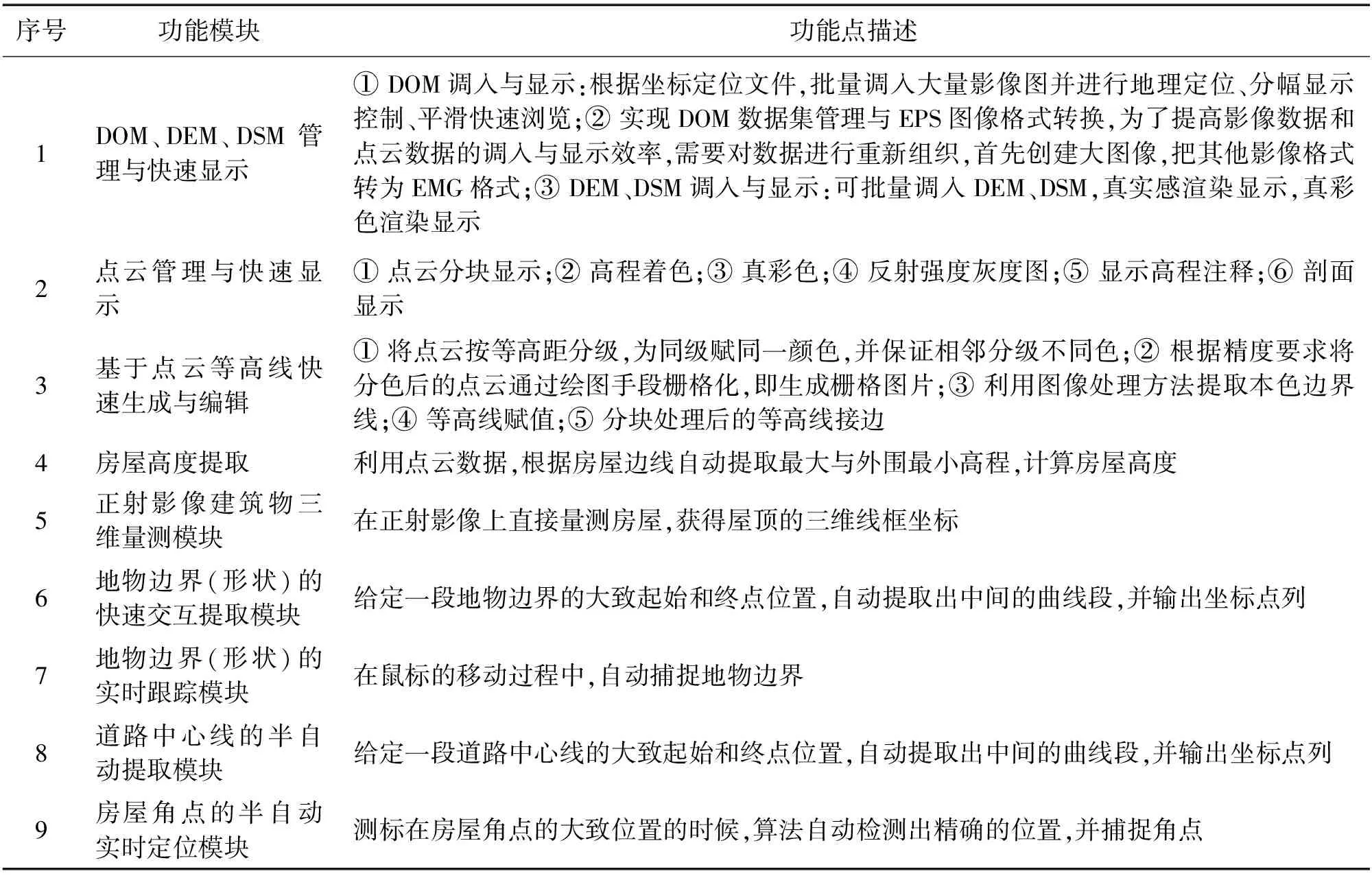
表1 城市LiDAR测图平台主要功能
四、关键技术与实现
1. 海量点云管理与快速显示
点云数据的特点之一就是数据量非常大,一个普通的工程文件中就可多达数亿点。在点云数据描述与显示环节进行优化,采用无损压缩技术、虚拟缓存技术、动态筛选技术,实现海量点云的高效加载与显示,解决了超大点云数据的存储与显示效率问题,如图1所示。
1) 无损压缩技术:在保证三维坐标数据精度的前提下,将用常规方法描述的点云数据压缩掉80%,使得每百兆存储空间点云高达千万点,有效地解决了海量点云的存储问题。
2) 虚拟缓存技术:将其分块保存在以本地硬盘为载体建立的缓存中,显示时从缓存中动态读取,用后释放。虚拟缓存与内存兼容性好,读写速度快,在海量点云数据高速显示过程中起到了关键作用。
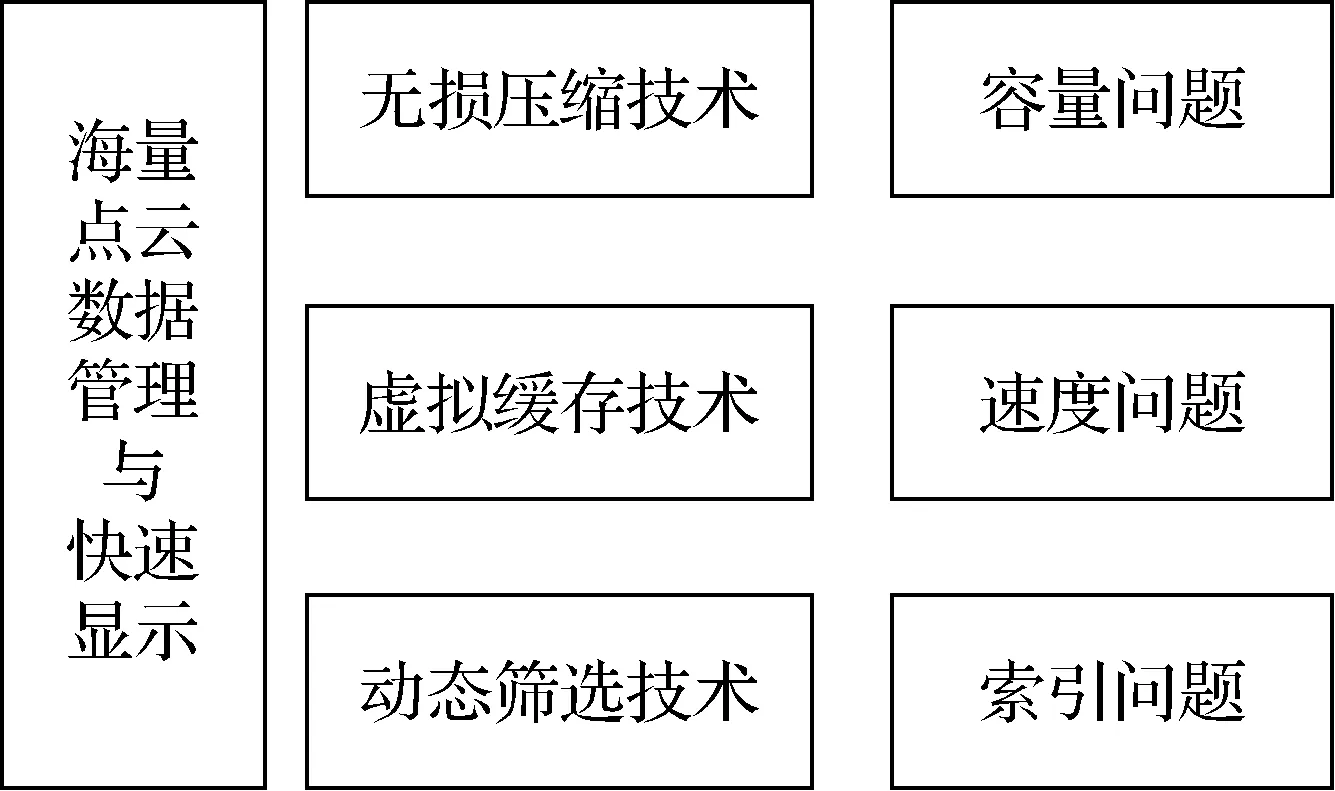
图1 海量点云数据管理与快速显示机制
3) 动态筛选技术:点云数据在同一窗口超过一定数量后(如100万点),其细节是显示设备无法表现或人眼分辨不出的,系统根据这一特点对同一窗口超大数据量显示时刻动态筛选,即在限定数量阀值内按空间平均分配的原则抽取一定的比例数据,避免数以亿计的点同时显示现象,从而提高显示性能。
2. 基于点云图像栅格化的等高线快速生成
基于点云(地面)提取等高线是工程实践中的主要需求之一,但由于点云数据量大,使得通过点云数据构建三角网、再基于三角网追踪等高线这种通常应用于常规矢量的处理方法在处理点云的过程中效果不理想或根本无法使用。本系统采用栅格的方法成功地解决了海量点云等高线自动生成这一生产难题,如图2所示。

图2 等高线快速生成机制
基本原理如下:将点云按等高距分级,并为同级赋同一颜色,保证相邻分级不同色;根据精度要求将分色后的点云通过绘图手段栅格化,即生成栅格图片;利用图像处理方法提取本色边界线;等高线赋值;分块处理后的等高线接边。由于图像处理成熟,实践中应用广泛,EPS通过点云栅格化方法,成功地将基于点云生成等高线问题转换为基于图像提取色块分界线问题;又由于点云栅格化过程中,绝大多数噪声已经被过滤掉,从而保证了等高线光滑、柔顺,如图3、图4所示。

图3 等高线快速生成
3. 基于正射影像建筑物三维量测
基于正射影像和密集三维点云,同步生成与影像对应的数字高程模型的方法,让二维影像上点的位置与该模型的三维坐标一一对应,从而精确获得对应点位的真实高程值和平面坐标。采用本方法无需观察立体影像对,在正射影像上就可以进行三维数字线画图和地物测绘。其原理与实施流程分别如图5、图6所示。

图4 等高线快速生成

图5 技术原理示意图
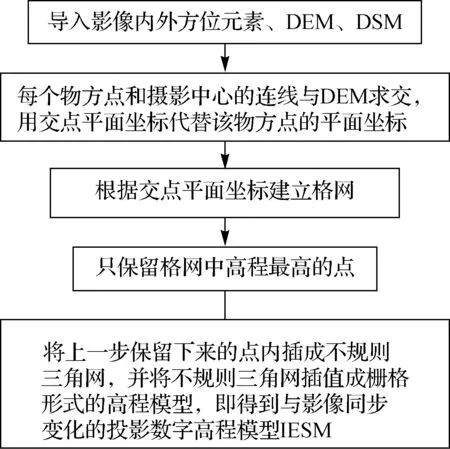
图6 技术实施的流程图
4. 基于正射影像地物自动与半自动提取
给定影像上线状目标的初值,可精确提取线状目标的形状。融合现有线划图测绘操作方式、影像上线状地物特征实时自动捕捉和提取、进行快速线划图测绘的技术实现了影像上线状目标人工引导下的半自动快速提取,提高了绘图精度与作业效率,如图7、图8所示。
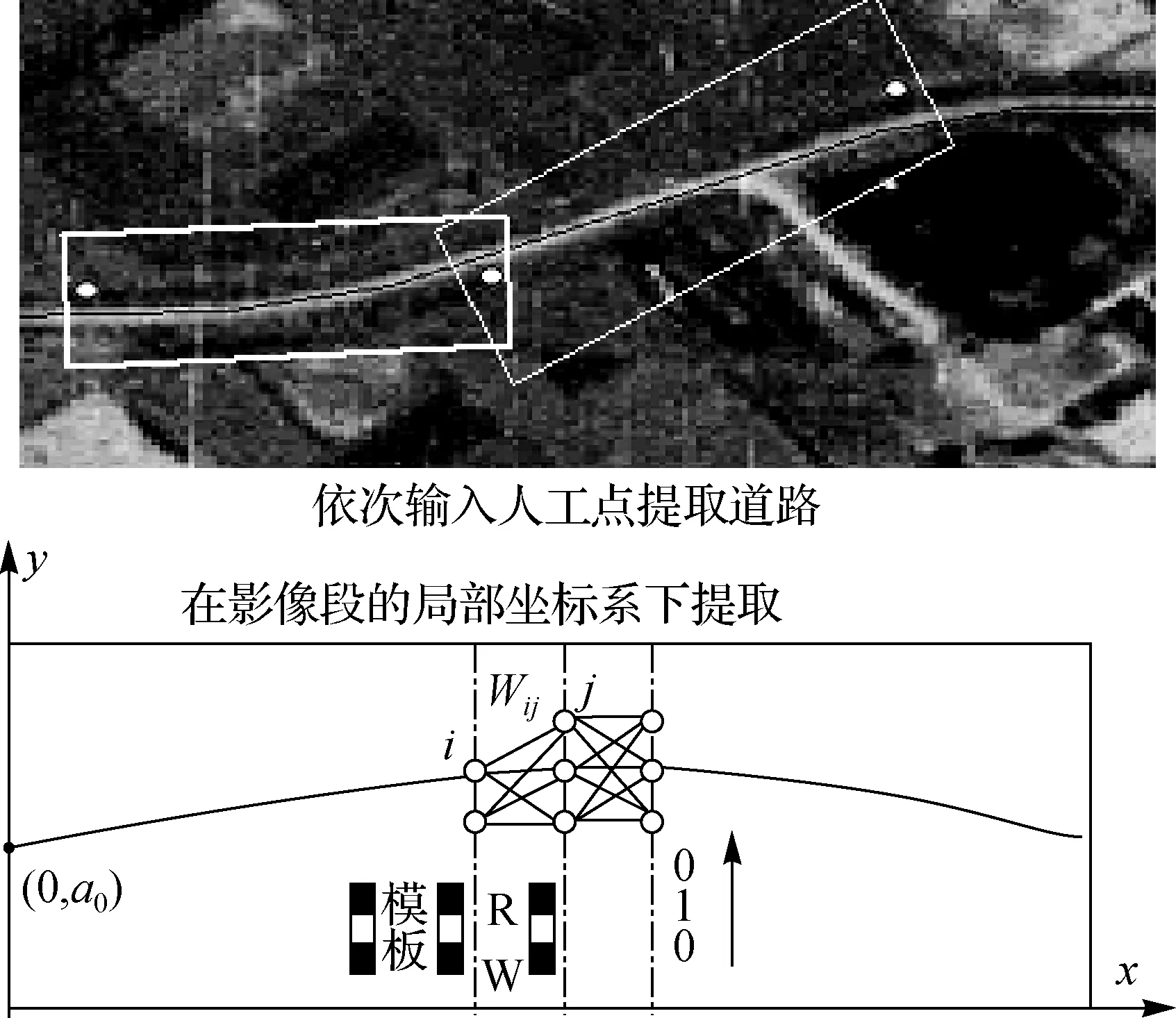
图7 基于二值模板匹配与优化计算的方法
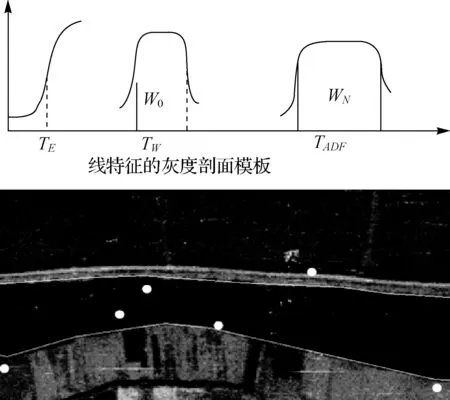
图8 基于自适应最小二乘模板匹配提取各段连续的抛物线
五、应用情况
基于城市机载LiDAR测图平台,本文完成了广州市从化1985 km2全域1∶5000地形图测图工作,开展了100 km21∶2000地形图测量试验与三维白模建立工作,在成果精度、图面表达等方面均取得了预期成果,实现了城市空间基础数据的快速获取、快速生产目标,实现了当年航测、当年生产目标。
整体上,本测图平台具有以下特点:
1) 高效便捷的数据组织管理:对海量点云、正射影像及原支持的地理信息数据批量快速加载及任意卸载,且多种数据融合于同一图面,省去了使用者频繁切换的麻烦,缩减了加载数据的等待时间,是提高作业效率的重要环节。
2) 方便、合理的数据显示控制:只需更改复选框内选择状态即能控制点云、DOM、地形图数据的隐藏显示,且对于点云可以按照高程变化设色显示、框选区域显示、剖面图显示等,有利于制图员对地形变化更好地把握。
3) 快速的等高线生成:该软件能大面积由点云快速生成等高线,根据笔者使用其他软件的经验,该系统在等高线的生成方面具有操作简单、占用计算资源少、速度快、图面美观等优点。
4) 摒弃了立体测图的束缚:目前流行的数字摄影测图平台需要有经验的航摄测图员采用立体相对方式测图,该软件集成了建筑物投影差自动改正功能,使得地形图的测制可以在普通计算机上进行,而且操作简单,易于学会。
六、结束语
LiDAR技术是利用返回的激光脉冲获取探测目标高分辨率的距离、坡度、粗糙度等信息,其能够全天时、全天候地获取地面的高密度三维数据,是建立数字表面模型、数字城市模型等相关领域的新兴高新技术[2]。城市机载LiDAR测图平台作为“城市LiDAR生产技术体系研究与应用”课题的一部分,完善了笔者所在单位基础地理数据快速生产技术体系,不仅保证了1∶500—1∶5000数据生产标准的一致性,而且按照信息化测绘要求,形成了机载LiDAR数据生产、质量控制、成图输出、数据入库的一体化作业流程,探索了一个面向专业服务的快速测图技术路线,建立了LiDAR测图快速生产技术体系。
目前,国内机载LiDAR技术研究主要集中在前期的数据处理方面,而对于后期制图方面研究较少,城市机载LiDAR测图平台的研发成功,给城市测绘部门快速获取空间基础数据提供了一种思路,具有借鉴意义。
参考文献:
[1] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社, 2007.
[2] 刘春.激光三维遥感的数据处理与特征提取[M].北京:科学出版社, 2010.
[3] 徐祖舰,王滋政,阳锋.机载激光雷达测量技术及工程应用实践[M].武汉: 武汉大学出版社, 2009.
[4] 王磊.面向城市规划的空间数据库动态更新模型研究[J].测绘科学,2009,34(6):215-217.
[5] 王磊,代培林. 面向规划的MGE数据整理工作内容与方法研究[J].测绘通报,2010(6):54-56.
