一种基于LiDAR数据的建筑物自动提取方法
2014-08-15史文中
郝 明,史文中,张 华
(1. 中国矿业大学 环境与测绘学院,江苏 徐州 221116; 2. 香港理工大学 土地测量与地理资讯系,香港 999077)
一、引 言
基于遥感数据自动提取建筑物和建筑物的三维重建是当前研究的热点[1-4]。利用人工提取方法从高分辨率遥感影像中提取建筑物耗时长、费用高,而利用计算机自动提取建筑物则会受到建筑物阴影及“同谱异物”现象的干扰,导致自动提取结果精度偏低。机载激光扫描测高(light detection and ranging, LiDAR)技术的蓬勃发展,为建筑物的提取和三维重建提供了新的数据源和方法,并取得了较好的效果。
LiDAR技术是激光扫描测距系统、惯性测量系统(inertial measurement unit, IMU)、动态差分全球定位系统(GPS)、成像系统和计算机的集成,能够快速获取高精度的地物和地面三维信息,并存储为海量的点云数据,具有全天候和大面积作业的优点。近年来,国内外学者对基于LiDAR数据的建筑物提取作了大量研究。文献[2]利用马尔可夫随机场(RMF)模型根据建筑物的形状、面积、空间关系和熵4部分能量进行基于LiDAR数据的建筑物提取;文献[3]利用多相水平集方法对建筑物屋顶进行分类,并提取屋顶形状,进而得到更精确的建筑物轮廓;文献[5]根据灰度共生矩阵计算的纹理特征,对规则化后的数字地表模型(DSM)进行建筑物的提取,以区分建筑物与树木;文献[6]和文献[7]将LiDAR数据与高分辨率遥感影像结合进行建筑物的提取,充分利用LiDAR数据的高度信息和影像的光谱信息,取得了较好的效果;文献[8]利用形态学滤波、区域增长和边缘探测等方法综合提取建筑物。研究发现,在一些传统算法中需要设置建筑物的最小和最大高程值[4, 9],当地形存在较大起伏或呈现阶梯状时,容易导致建筑物遗漏。针对该问题,本文提出一种基于层次(由粗到细)的建筑物提取方法。
二、试验方法
本文的试验方法流程如图1所示。主要包括:① LiDAR数据的预处理,即对点云数据重采样,生成DSM;② 利用迭代自组织数据分析(ISODATA)算法根据高度信息对DSM进行聚类;③ 在聚类结果基础上依次利用建筑物面积、地面高度差和梯度信息进行建筑物信息的初步(粗)提取;④ 最后基于空间邻域关系对粗提取到的建筑物进行精处理。

图1 由粗到细的建筑物提取流程图
1. 点云数据预处理
为进行建筑物的提取,首先要对LiDAR点云数据进行空间插值生成规则网格的DSM。文献[10]对12种不同的插值方法(最近邻插值、克里金插值、多项式回归和移动均值等)进行了研究,结果表明最近邻插值对间断保存信息是适用的,且建筑物的原始高度可以较好地保存在插值后的DSM中,准确提取建筑物不连续性。本文采用最邻近插值方法对原始点云数据进行插值生成2 m分辨率的网格DSM,作为后续处理的基础数据。
2. ISODATA算法聚类
ISODATA是一种动态聚类算法,得到了广泛应用[11],本文用其对DSM进行聚类。

(1)
式中,μc是c类的中心。在迭代过程中允许类的分裂、合并和删除。误差平方和在迭代中减小,直至达到收敛标准。
本文在ENVI软件中执行ISODATA算法,对DSM数据进行聚类,需要预先设置控制参数,包括类别数目C、允许迭代的最大次数I、一个类别中样本的最少数目M、误差平方和e、类间距离D和每次允许合并的类别对数L。
3. 建筑物粗提取
在完成对DSM距离影像的聚类之后,首先根据建筑物的最大和最小面积对各类进行选择,初步选出一些面积符合建筑物特征的备选目标Oi,同时超过最大面积的目标认为是地面Gi,并利用这一假设进行下一步提取。
在此基础之上,利用高度信息,计算备选目标Oi与其最近的地面G之间的高差hi
hi=Hi-HG
(2)
式中,Hi和HG分别为备选目标Oi和距其最近的地面G的平均高度。若hi小于设定的阈值,则认为备选目标Oi不是建筑物。基于高差的方法代替了传统的设置建筑物最小高度的方法,在一定程度上避免了由于地形起伏较大引起的建筑物错误提取。
最后根据DSM的坡度信息,对备选目标作进一步提取。计算备选目标的平均坡度值,并与设置的坡度阈值比较,如果大于坡度阈值,则认为备选目标是建筑物,否则为非建筑物。经过上述处理,完成建筑物的粗提取。
4. 建筑物精处理
基于粗提取到的建筑物信息,根据DSM距离影像像元之间的空间8邻域信息,如图2所示,对提取的建筑物内部的小洞进行填充,对粗提取建筑物进行精处理。

图2 空间8邻域关系示意图
三、试验结果
该试验以徐州某大学校园的LiDAR数据为例,大小约为1.2 km×1.3 km。经过最近邻插值后生成2 m分辨率的DSM距离影像,如图3所示,大小为596像素×651像素,最低和最高处分别为29 m和118 m。
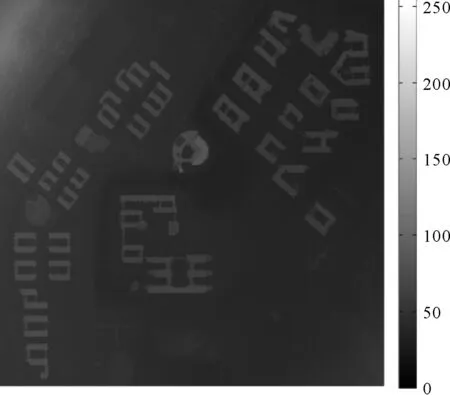
图3 最近邻插值后生成的DSM
在ENVI软件中执行ISODATA算法,对DSM距离影像进行聚类,初始参数设置如下:最小类别数为5,最大类别数为10,允许迭代的最大次数为20,一个类别中的最少数目为50,类间距离为10,每次允许合并的类别数为2。经过迭代,DSM距离影像最终被聚为10类,如图4所示。
依据聚类结果,依次对每类进行建筑物的粗提取。首先设置建筑物的最小和最大像素数目分别为25和2500,提取的备选目标如图5所示。可以看出,建筑物被提取的同时,也有一些山体、树木和高坡被提取出来。此外,面积大于2500像素的目标认为是地面,并记录下来,为高差阈值提取建筑物提供地面信息。

图4 ISODATA算法聚类结果

图5 面积阈值提取的备选建筑物
在此基础之上,判断备选建筑物平均高度与距其最近地面的平均高度之差,若小于设定的阈值,则认为备选目标是地面;反之则认为是建筑物,接受后续处理。本文中设置高差阈值为3 m,处理后的结果如图6所示。从图中可以看出,原来建筑物内部的区域已被去除。

图6 高差阈值提取的备选建筑物
建筑物粗提取的最后一步是根据备选建筑物的坡度信息判定其真实性。图7为试验区的坡度图,最小值为0,最大值为89,本文设置坡度阈值为40。提取的结果如图8所示。

图7 试验区坡度信息
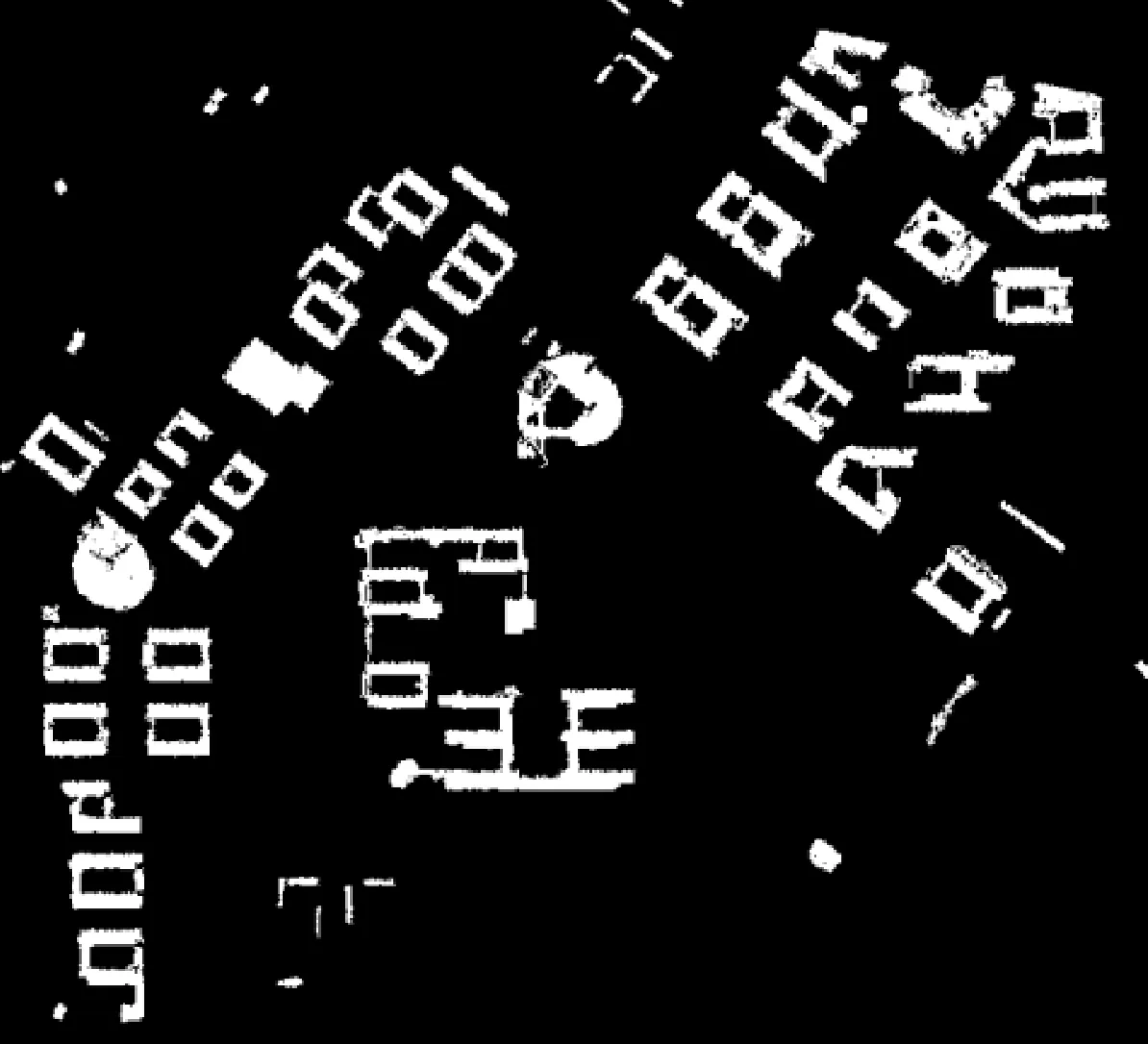
图8 坡度阈值提取的建筑物
最后根据DSM距离影像的空间8邻域关系,对提取的建筑物进行填充,最终的提取结果如图9所示。

图9 最终提取的建筑物
四、精度分析
从图9中可以看出,校园的主体建筑物均被提取出来,并且位于山坡下和校园内低矮的建筑物也能被提取。但是由于面积、高度差和坡度等阈值的设置,不可避免地造成了一些面积较小或与地面高差较小的建筑物的漏提或错提,见表1。试验区共有93栋建筑物,漏提和错提的建筑物分别为4栋和3栋,有89栋建筑物被正确提取出来,总误差为7.5%,实现了高精度的建筑物自动提取。
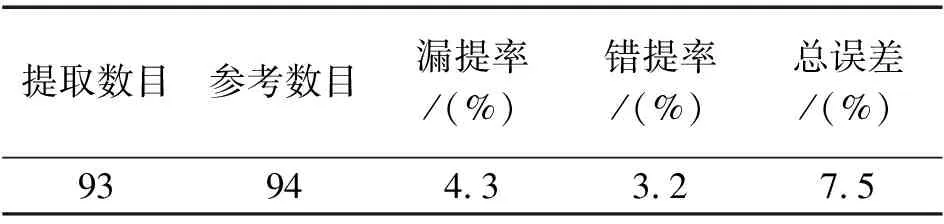
表1 建筑物提取误差统计
影响本文方法精度的因素主要是ISODATA聚类数目和面积、高差、坡度阈值的设置。在ISODATA聚类过程中,类别数目设置过多或过少都会影响建筑物聚类的完整性,降低提取精度。在设置面积、高差和坡度阈值时,如果设置的阈值不恰当,将造成建筑物的漏提或错提。因此最好对测区有些先验知识,或者经过多次试验调节这些阈值,以提高建筑物的提取精度。
五、结束语
针对LiDAR点云数据的特点,本文提出一种由粗到细的建筑物自动提取方法。试验表明,经过粗提取和精处理,绝大部分建筑物都能被准确地提取,能够满足三维建筑物重建的需要。特别是测区地形起伏较大时,可以避免传统方法中设置建筑物最小高度而引起的建筑物漏提现象。如果能结合测区的多光谱影像或原始GIS数据等其他信息,可以进一步提高建筑物的提取精度,这也是今后的研究方向。
参考文献:
[1] BALTSAVIAS E. Object Extraction and Revision by Image Analysis Using Existing Geodata and Knowledge: Current Status and Steps towards Operational Systems [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2004, 58(3): 129-151.
[2] APARECIDA DOS SANTOS G E, PORFRIO D P A. Extraction of Building Roof Contours from LiDAR Data Using a Markov-Random-Field-Based Approach [J].IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(3): 981-987.
[3] KIM K H, SHAN J. Building Roof Modeling from Airborne Laser Scanning Data Based on Level Set Approach [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2011, 66(4): 484-497.
[4] 冯甜甜, 龚健雅.基于 LiDAR 数据的建筑物自动提取方法的比较[J].测绘通报, 2011(2):21-23.
[5] 张皓, 黄艳, 杨洋, 等.基于 GLCM 纹理特征的 LiDAR 点云建筑物自动提取[J].测绘通报, 2010(11):31-33.
[6] 郝明, 邓喀中, 张华.基于遥感数据提取建筑物的主动轮廓改进模型 [J].中国矿业大学学报, 2012,41(5):833-838.
[7] SOHN G, DOWMAN I. Data Fusion of High-resolution Satellite Imagery and LiDAR Data for Automatic Building Extraction[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2007, 62(1):43-63.
[8] ZHANG K, YAN J,CHEN S C. Automatic Construction of Building Footprints from Airborne LIDAR Data [J].IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(9):2523-2533.
[9] 张小红. 机载激光雷达测量技术理论与方法[M]. 武汉:武汉大学出版社,2007:137-146.
[10] YANG C S, KAO S P, LEE F B, et al. Twelve Different Interpolation Methods: A Case Study of Surfer 8.0[C]∥Proceedings of the XXth ISPRS Congress.Turkey: Istanbul,2004.
[11] JAIN A K, MURTY M N, FLYNN P J. Data Clustering: A Review[J].ACM Computing Surveys, 1999, 31(3):264-323.
[12] TARABALKA Y, BENEDIKTSSON J A, CHANUSSOT J. Spectral-spatial Classification of Hyperspectral Imagery Based on Partitional Clustering Techniques [J].IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(8):2973-2987.
