载波相位测量原理及在GPS软件接收机上的实现
2014-08-15孙福余徐亚明邹进贵
孙福余,张 鹏 ,2,徐亚明,2,邹进贵,2
(1. 武汉大学 测绘学院,湖北 武汉 430079; 2. 精密工程与工业测量国家测绘地理信息局重点实验室,湖北 武汉 430079)
一、引 言
商用接收机一般属于硬件接收机,具有较完备的定位功能,并且能够输出精确的载波相位测量值以供后处理软件解算出高精度的定位结果。但硬件接收机灵活性较差,不方便软件升级,也不能满足室内、城市峡谷等特殊场合的定位需求。软件接收机将信号处理模块用软件来实现,不仅可以测试新制式的卫星信号和更先进的定位算法,而且其灵活的软件构架可以根据需求输出更多的有效信息,具有重要的研究价值。
当前的软件接收机大多采用伪距(又称码相位)测量值计算定位结果[1],米级的定位精度限制了软件接收机在大地测量、精密工程测量、精细农业等精密定位领域的应用。因此,在软件接收机上实现载波相位测量值的精确输出吸引了研究人员的关注[2]。
本文详细分析了载波相位测量值输出的基本原理和在软件接收机上的实现过程,并通过和商用接收机输出的载波相位测量值的对比验证了采用软件接收机输出的载波相位测量值的稳定性和高精度。
二、载波相位测量值输出基本原理
卫星信号位于射频频段,需要借助于载波调制。载波信号在其传播路径上的不同位置有着不同的相位值,如果能精确地测量出传播路径上两点间载波的相位差异,那么这两点之间的距离就可以被推算出来。载波相位测量值的定义为“接收机收到的载波信号的相位与载波信号初始发射相位的差值”。即可以将载波相位测量值Φ表示为整数载波周期数N(简称整周数)和小数周数值φ之和的形式,即Φ=N+φ。式中,φ可以近似由接收机跟踪模块得到,而精确的整周数N可以通过整周模糊度解算方法求得,如LAMBDA方法[3]。
假设t1时刻卫星处于位置1,而此时的载波相位测量值为Φ1=N+φ1,而在t2时刻卫星运行到了位置2。由于在卫星的运动过程中,接收机持续跟踪卫星发送的载波信号,所以N保持不变,那么t2时刻的载波相位测量值可以表示为Φ2=N+φ2。令Δφ=φ2-φ1,可以得到Φ1和Φ2的关系为
Φ2=Φ1+Δφ
(1)
卫星和接收机之间距离的变化也会改变接收信号的频率,产生多普勒频移fD(t)。根据频率和相位的内在关系,对fD(t)的积分会得到该时间段内的载波相位测量值的变化量Δφ,简称积分多普勒[4]

(2)
将式(2)代入式(1)可以求得t2时刻的载波相位测量值。本节简要介绍了载波相位测量值输出的基本原理,下一节会结合软件接收机框架详细分析,要解决的核心问题是如何精确地输出fD(t)。在不影响理解的前提下,将连续时间信号fD(t)简单表示为fD。
三、载波相位测量原理
1. 射频信号下变频
在GPS软件接收机框架中,通常会采用混频电路将射频信号下变频到中频频段,在中频频段完成数字化,如图1所示。

图1 射频信号下变频处理流程
在图1中,fRF和fIF分别表示射频信号和中频信号的标称频率。接收机收到的射频信号的瞬时相位表示为θRF,而本地复制的载波信号由频率为fRF-fIF,相位为θmix的载波构成。混频后的信号经过低通滤波,构成了频率为fIF+fD,相位为θIF的中频信号,其中θIF=θRF-θmix。比较图1中的中频信号和射频信号的频率,不难看出多普勒频移分量fD并未改变。因此下变频操作并不会影响后续的载波相位测量值输出。
2. 载波跟踪环
经过采样后的中频数据会依次输入捕获和跟踪模块。捕获模块主要实现伪随机码和中频信号频率的初始捕获,并将较粗略的捕获结果提交给跟踪模块。跟踪模块由码跟踪环和载波跟踪环共同组成,其中码跟踪环由延迟锁定环路(delay lock loop,DLL)实现,作用是跟踪并剥离伪随机码;而载波跟踪环一般由锁相环(phase locked loop,PLL)完成,目标是完全剥离载波信号[5]。

本地复制的同向载波和正交载波分别与中频信号相乘,分别得到同向分量IP(t)和正交分量IQ(t),图2中的积分清除模块实现了低通滤波的功能。
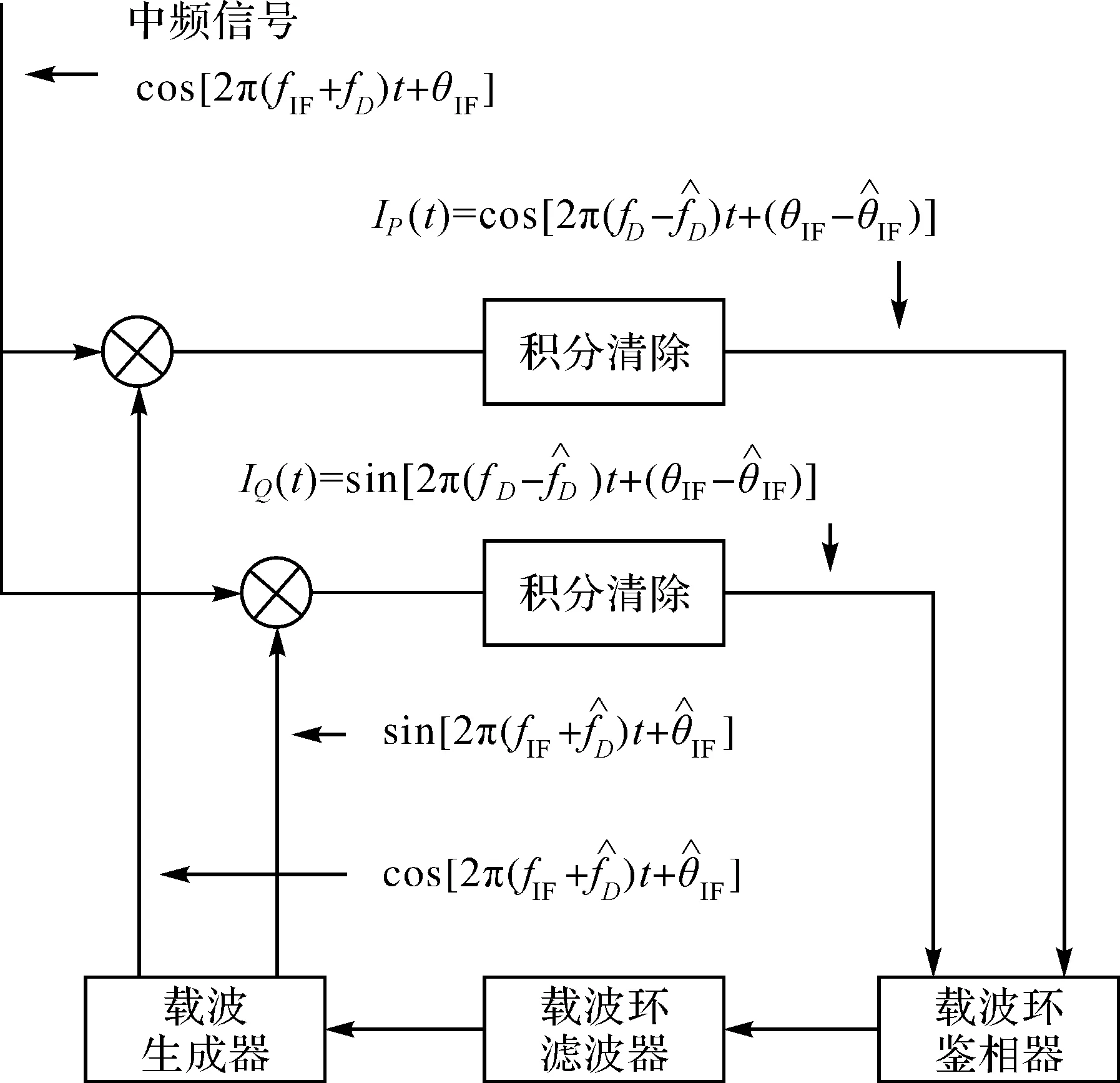
图2 载波跟踪环信号处理流程

3. 软件实现
以上分析的前提是中频信号和本地复制载波都是连续时间信号。但在软件接收机中,输入锁相环的中频信号和本地复制载波都是离散信号,锁相环的工作也完全由软件实现,因此锁相环的频率更新不再是实时进行的,而是有一个更新周期TPLL。只有在每个频率更新周期结束后,才会计算在该周期内中频信号和本地复制载波的相位差异,并以此为依据更新载波生成器的输出频率。
理论上,在第i个频率更新周期时间内,载波相位测量值的变化量Δφi可以表示为
Δφi=-fD(i)×TPLL+φe(i)
(3)
如果给定t1时刻的载波相位测量值Φ1,那么t2时刻的载波相位测量值Φ2可表示为
(4)
式中,m=(t2-t1)/TPLL,可视为在(t2-t1)时间段内包含的频率更新周期TPLL的个数。
四、测试结果
通用软件无线电外设USRP是科研领域较为通用的软件无线电平台。在项目组的前期工作中,已经在USRP平台上利用伪距测量值完成了米级精度的单点定位[1]。本文在其基础上进一步实现载波相位测量值的输出。USRP由子板和母板组成,子板主要完成射频信号到中频信号的下变频操作,而母板的主要功能是将处于中频频段的模拟信号通过采样变换为数字信号,并将得到的数字中频数据通过USB接口传递给计算机中的软件处理模块,由软件处理模块完成捕获、跟踪和载波相位测量值输出等功能。测试选择了型号为DBSRX的USRP子板,DBSRX可以处理的射频信号频率范围从800 MHz到2.4 GHz,涵盖了包括GPS在内的所有GNSS系统的信号频段。尽管本文的测试以GPS信号为例,但从原理上讲,本文介绍的载波相位测量原理和软件实现也适用于其他GNSS系统。
在载波跟踪环路中,笔者选择了二象限反正切函数算法来近似求解每一个更新周期TPLL内产生的相位差异分量φe(i)。环路滤波器采用二阶锁频环辅助的三阶锁相环,且锁相环的参数更新周期TPLL设定为1 ms。载波相位测量值输出的初始值由无模糊度的码相位测量值计算得到。
测试试验选择了零基线相对定位的测试方案,即将同一个GPS有源天线采集的信号通过功率分配器分别连接USRP和诺瓦泰商用接收机。零基线方案保证了在同一时刻,USRP和诺瓦泰商用接收机收到的射频信号强度、电离层延迟和对流层延迟等都是相同的,而相对定位可以消除大部分测量误差。测试方案如图3所示。测试地点在武汉大学测绘学院顶楼,测试开始时间为2012年10月17日9∶30。
测试首先将USRP输出的载波相位测量值与伪距测量值进行了对比。其中,载波相位测量值采用解算出的整周模糊度进行了修正。

图3 零基线相对定位测试方案示意图
图4和图5分别表示了在600 s的时间内,USRP输出的7号卫星和28号卫星的载波相位跟踪值和伪距测量值。在图4和图5中,载波相位测量值无论在稳定性还是在精度方面均远优于伪距测量值。
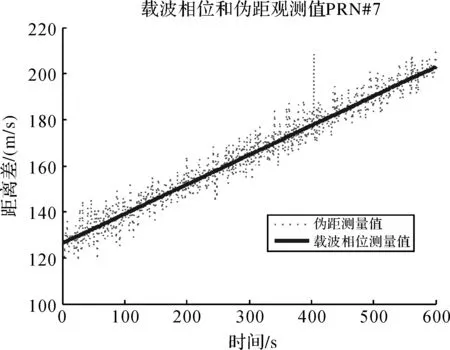
图4 7号卫星的载波相位和伪距测量值

图5 28号卫星的载波相位和伪距测量值
为了横向评估USRP输出的载波相位测量值的精度,笔者将USRP和诺瓦泰商用接收机输出的载波相位测量值进行三次差分运算。即两个接收机在同一时刻针对同一卫星的载波相位测量值进行差分,消除卫星时钟误差和大气延迟误差;然后,两台接收机在同一时刻对7号和28号两颗卫星的载波相位测量值进行双差运算,消除接收机的时钟误差;最后针对不同时刻的双差载波相位测量值再求一次差分,消掉双差整周模糊度[4]。
由于测试方案采用了零基线的相对定位,理论上根据三次差分运算的计算结果推算出的基线向量的长度应该为零,实际的结果如图6所示。经过三次差分后的测量值的均值确实在零附近,变化范围约为1 cm。由此可以验证USRP输出的载波相位测量值与诺瓦泰商用接收机输出的载波相位测量值具有同一等级的精度。
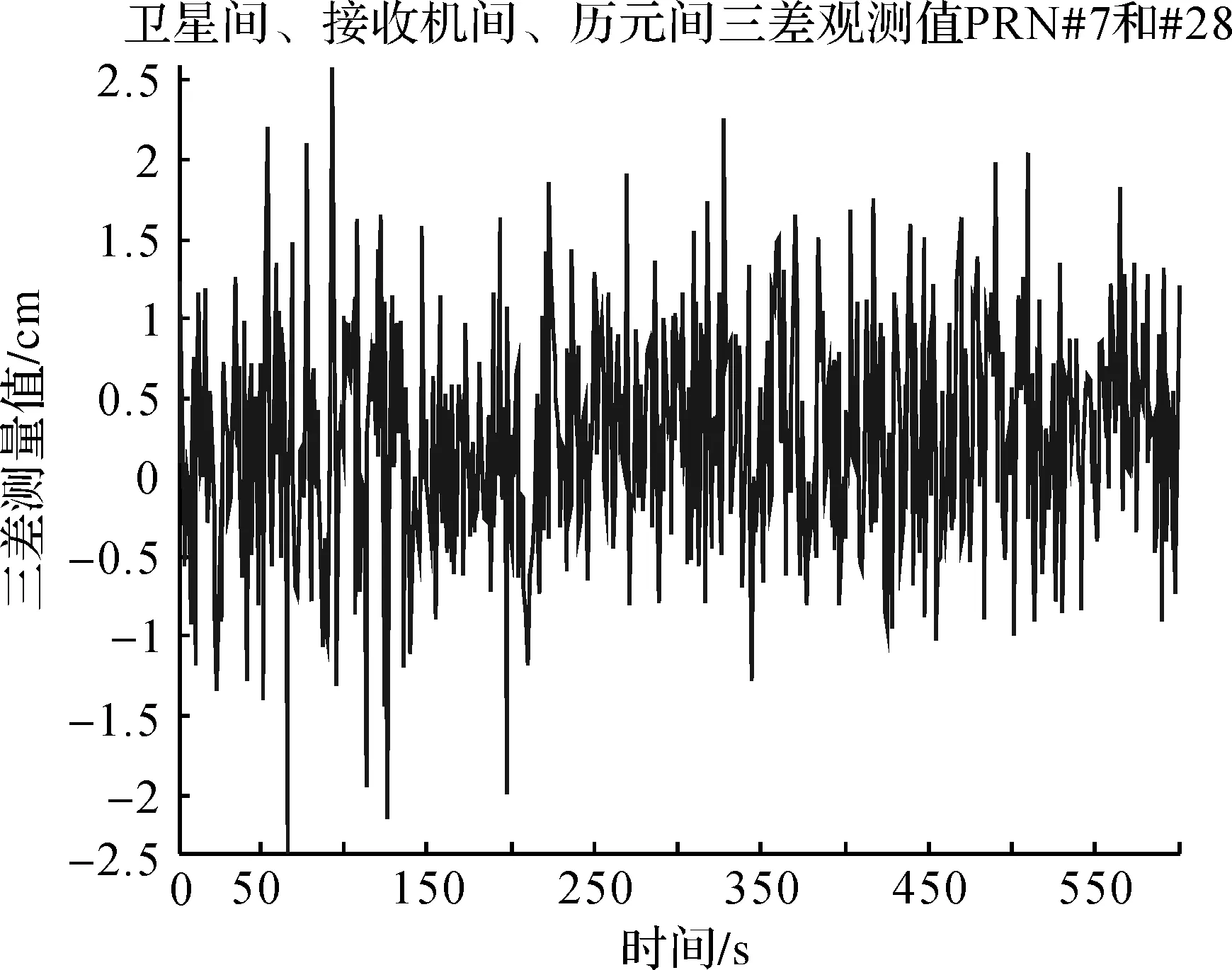
图6 7号卫星和28号卫星的三差测量值
五、结束语
本文介绍了载波相位测量的基本原理和在软件无线电平台USRP上的具体实现过程,并与硬件接收机输出的载波相位测量值进行了对比,证明了其具有较高的稳定性和精度。下一阶段,笔者会针对不同基线长度对定位精度的影响进行研究,并尝试采用多接收机天线进一步提高定位精度。
参考文献:
[1] 张鹏,孙福余,徐亚明,等.基于USRP平台的GPS软件接收机设计与实现[J].测绘通报,2012(11):55-58.
[2] PETOVELLO M,O′DRISCOLL C.Carrier Phase and Its Measurement for GNSS[J]. Inside GNSS, 2010 (7-8): 18-22.
[3] ERICKSON C. An Analysis of Ambiguity Resolution Techniques for Rapid Static GPS Surveys Using Single Frequency Data[C]∥Proceedings of the 5th International Technical Meeting of the Satellite Division of The Institute of Navigation. Albuquerque. NM:The Institute of Navigation,1992:453-462.
[4] 谢刚. GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[5] GARDNER F M. Phaselock Techniques[M].3rd ed. Hoboken,New Jersey:John Wiley & Sons. Inc,2005.
[6] MISRA P,ENGE P. Global Positioning System Signals, Measurements and Performance [M].2nd ed. Beijing: Publishing House of Electronics Industry, 2008.
