CPSO优化FLS-SVM应用于山区地形的GPS高程拟合研究
2014-08-15刘新新郑远攀
甘 勇, 刘新新,郑远攀
(1. 郑州轻工业学院 计算机与通信工程学院,河南 郑州 450002; 2. 郑州师范学院,河南 郑州 450044;3. 应急平台信息技术河南省工程实验室,河南 郑州 450002)
一、引 言
目前国内应用于各种领域的高程数据是基于1985 国家高程基准的正常高,而SRTM则是采用基于EGM96 高程基准的正高,因此,对高程转换的研究就自然成为SRTM数据应用的基础。根据研究可知,大地高与正常高间的关系表示为:H大=H正+ξ=H正常+N。其中,H大表示大地高;H正表示正高;ξ表示大地高与正高之间的高程异常。除数据本身大地高测量误差外,高程异常是制约正常高精度的关键。
求解高程异常的常用方法主要是利用GPS联测方法来拟合高程获得的。传统的求解方法主要有多项式拟合法、曲面拟合法、多面函数拟合法[1]等。由于这些方法都存在不同程度的人为参与,影响了模型的精度,近年来一些学者基于原有理论基础提出了基于神经网络及其改进算法[2-3]的高程拟合算法、支持向量机等算法。神经网络算法的应用虽然模型简单、易学习,但算法收敛速度慢,易陷入局部最优;虽然有学者也作了改进,消除了局部最优状态,但整体拟合精度没有显著提高。1995年基于结构风险最小化的支持向量机模型[4-5]的首次出现受到了众多学者的关注,它不仅在解决小样本、非线性及高维模式识别中表现出许多特有的优势,同时克服了神经网络过拟合、局部最优等问题,是继神经网络之后的又一研究热点。
周理含[6]将最小二乘支持向量机(LS-SVM)引入GPS高程拟合领域,简化了计算复杂度,提高了拟合速度,但向量机参数的选择存在人为的不确定性。汤凯煌[7]考虑了山区地形起伏对拟合精度的影响,提出基于地形改正的GPS高程异常曲面拟合方法,虽然减小了因地形起伏引起的精度影响,但曲面拟合方法适用于样本数据较大的情况,对于较小样本拟合精确度较低。
本文在众多学者研究结果的基础上提出一种应用于地形起伏较大山区的考虑地形改正在内的CPSO优化FLS-SVM的GPS高程拟合方法。该方法引入模糊思想构成模糊最小支持向量机模型(FLS-SVM),通过CPSO优化选择核函数参数,可减少人为参数选择不确定性对精度的影响,并通过地形改正减少地形起伏引起的精度降低情况。
二、最小二乘支持向量机原理及模糊理论的引入
最小二乘支持向量机[6-8]是在1999年由Suyken和Smola正式提出的基于SVM改进的一种模型。它承接了支持向量机训练过程中结构风险最小化原则,采用等式约束代替不等式约束作为损失函数,代替传统支持向量机中的二次规划方法,解决了SVM 在样本数目多时计算速度慢、复杂、收敛精度低等二次规划问题。
给定一个有M个训练样本的数据{(xi,yi),i=1,2,…,M}表示n维向量,且(xi,yi)∈Rn×R,其中xi为样本输入数据,yi为样本输出数据。通过非线性映射,将输入数据向量空间映射到高维特征输出数据向量空间构建最优超平面。根据结构风险最小化原则,最小二乘支持向量机的最优表示函数为
式中,目标函数的两项分别表示模型的泛化能力和精确度;w为权向量;ξi为模型松弛因子;b为模型偏差;γ为可调参数,可调节控制J(w,ξ)函数。引入Lagrange函数乘子αi(i=1,2,…,n)后的等式约束目标函数为

由KKT等式条件,上述函数求解可得
消去变量w和ξi,可得方程组
式中,Ω=[Ωi,j]n×n是一个n阶对称矩阵。根据Mercer条件,可知Ωi,j=yiyjφ(xi)Tφ(yj),又根据核函数K(xi,xj)=φ(xi)Tφ(xj),即可将目标函数转化为最小二乘支持向量机非线性模型

由上可知,正则化参数γ和核参数σ的确定是影响LS-SVM模型计算的基础。同时为解决LS-SVM对于孤立点过于敏感的问题,将模糊思想[10]引入到LS-SVM中,对样本进行模糊化处理,即为每个样本引入模糊隶属度μi,则目标函数模型方程组表示为
由此可知,引入模糊思想的LS-SVM模型中模糊隶属度即表示了样本对回归拟合贡献的程度,是影响模型精度的因素之一。
三、山区局部地形改正方法
传统的高程拟合方法[3]只适用于高程异常变化较小的平缓地区,不适用于高程异常变化剧烈的山区地带。本文考虑到地形起伏对高程拟合精度的影响,将局部地形改正方法应用于地形起伏较大的山区地带,奠定了后期高程拟合的基础。
由于高程受到地球重力场模型、平均重力异常和数字高程模型的影响[11],将高程异常影响因素表示为
ξ=ξGM+ξΔg+ξTC
式中,目标函数项分别表示为重力场模型、重力异常和地形起伏对高程的影响。如果以20 km波长为界来考虑,高程异常可表示为
ξ=ξ0+ξTC
式中,ξ0和ξTC分别表示高程异常的中长波项和短波项。中长波项由重力场模型和重力异常构成,一般较为稳定,可忽略不计,短波项是由地形起伏引起的,因此需要对地形进行局部改正。将周围地形起伏点的扰动位进行叠加求得该点地形起伏对高程异常精度的影响值[11],即
式中,Tc为扰动位的影响;r为重力值;r0为格网点和待求点间的距离。
四、混沌粒子群优化FLS-LVM参数的山区GPS高程拟合
高程拟合模型建立流程图如图1所示。
1. 移去局部地形改正
本文根据“移除-恢复”法,由SRTM DEM数据[7]计算出参与拟合点的地形改正ξTC。鉴于高程异常值影响因素中的中长波项一般比较稳定,对高程异常精度没有太大影响,本文只考虑短波项的影响,即首先需要移去高程异常值中的短波项,即f(x)=ξ-ξTC,获得预处理样本集;然后并对样本集进行有效处理,划分不同的训练集和测试集组合样本。
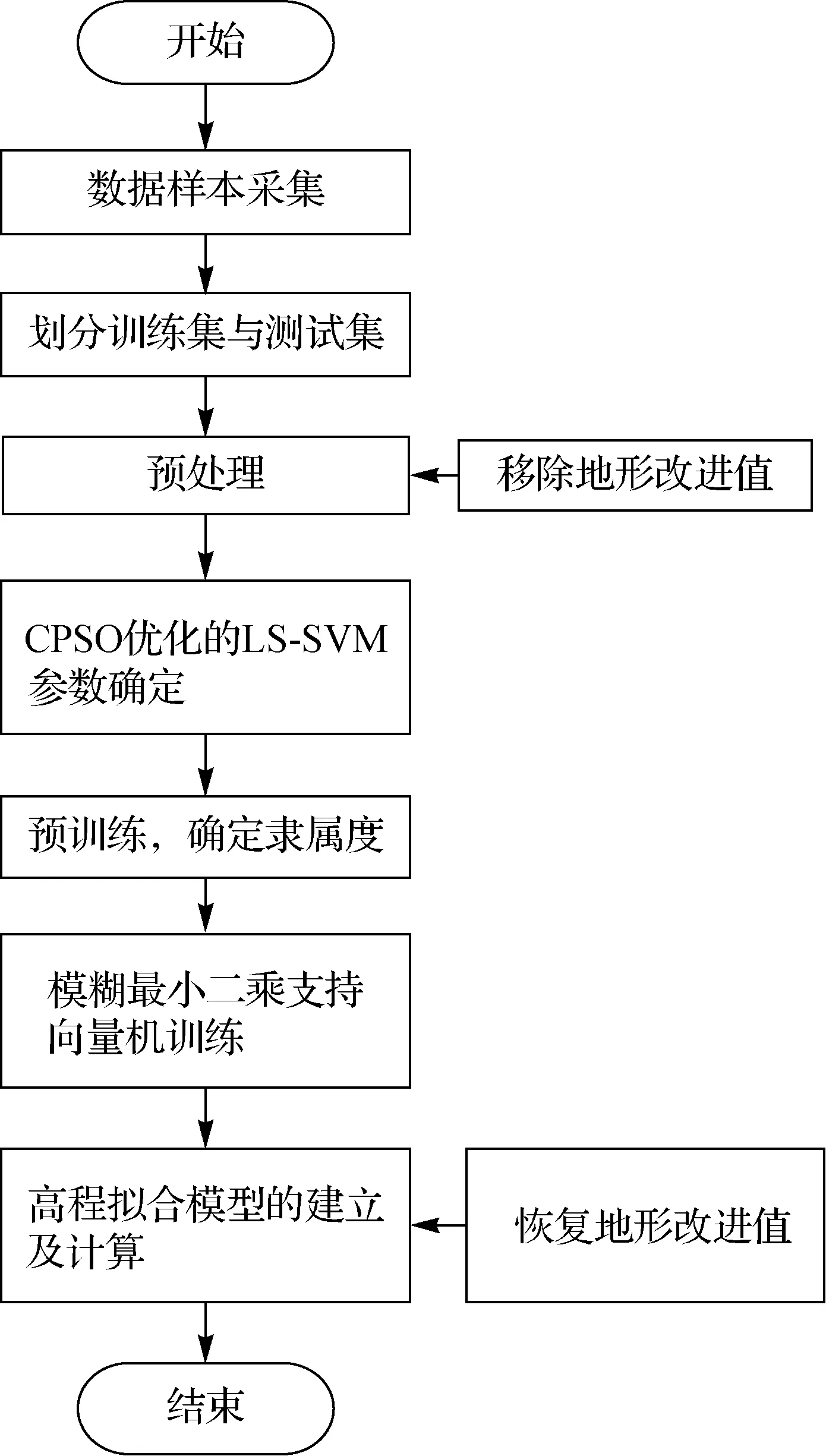
图1 高程拟合模型流程图
2. CPSO应用于LS-SVM的参数选择
LS-SVM作为SVM的一种改进模型,也是一种自学习算法模型,其性能主要依赖于学习机的参数选择,因此,提高其学习和泛化能力成为目前LS-SVM应用的主要研究问题,正则化参数γ和核参数σ是提高模型学习和泛化能力的重要指标。
目前常用的LS-SVM参数选择方法[9]有正交验证法、基于遗传算法的参数选择、基于粒子群算法的参数选择。传统的正交验证法虽然在一定程度上可以获得较好的泛化能力,但针对大样本参数选择会增大计算量;遗传算法在参数选择上具有自动性和大样本收敛速度快的优点,但存在算法操作复杂、易早熟收敛,影响了算法的有效性;粒子群优化算法虽然减少了遗传算法中的“交叉”、“变异”操作,算法简单易实现,收敛速度快,但易遭遇进化初期收敛速度快,后期收敛速度慢的收敛问题,从而陷入局部极值问题,并且在计算过程中还易遭遇维数灾难。因此,本文针对传统参数选择方法无法解决的问题提出了一种基于混沌粒子群的最小二乘支持向量机参数选择方法,通过选择参数γ和σ的最优组合来提高模型的学习和泛化能力。参数选择流程如下:
1) 对最小二乘支持向量机参数进行初始化设置并作归一化处理,设置最大迭代次数。
2) 进行混沌空间搜索。
3) 反归一化计算最小二乘支持向量机参数。
4) 将向量机模型输出值同历史最优值进行比较,如果当前值更优,则将该值替换原有的历史最优值;否则返回步骤1),重新进行计算。
5) 若满足迭代次数,输出搜索最优值;否则返回步骤1),重新搜索。
6) 将上述搜索结果作为粒子群初值,将空间中的每个粒子和整个群体中的粒子同历史最优位置进行比较,替换原有的历史最优位置并更新最优位置新参数。
7) 新参数建立新的向量机模型并输出模型最优值;否则返回步骤6),重新进行计算。
8) 若满足最终迭代次数,则停止搜索,输出最优向量机模型参数;否则返回步骤6)继续迭代。
3. 样本模糊隶属度值的确定
本文根据上述设定的训练集和测试集的不同组合样本,以及经过CPSO优化获得的模型参数进行最小二乘向量机模型预训练,根据样本预训练输出值与期望值间的关系确定隶属度值。

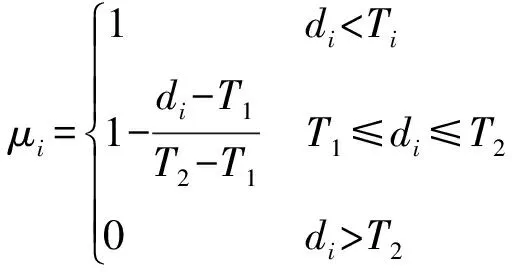
为使训练样本不受噪声或异常点的影响,令T1=σ,其中
4. 高程拟合模型建立及应用
假设高程异常为
ξi=Ha(Xi,Yi,Zi)
式中,(Xi,Yi,Zi)分别为GPS水准点坐标中的平面坐标和大地高坐标。
本文高程拟合模型以GPS水准点三维坐标(Xi,Yi,Zi)作为输入量,高程异常作为输出量,构成求解高程异常的非线性方程模型。此外,顾及山区地形起伏对高程异常拟合精度的影响,引入地形改正量构建高程拟合模型,根据“移除-恢复”法,可得高程拟合模型为
ξi=Ha(Xi,Yi,Zi)+ξTC
设Hi=(Xi,Yi,Zi),则模型表达式可转化为
ξi=Ha(Hi,ξTC)
考虑地形改正在内的最小二乘支持向量机模型即可由GPS水准点三维坐标和地形改正量作为模型输入向量,高程异常作为模型输出向量训练获得。应用到SRTM数据正常高获取中,由大地高与正常高间的关系表示H大=H正+ξ=H正常+N可知,SRTM正高数据叠加EGM96水准面即可获得已知点大地高,输入高程拟合模型即可获得SRTM数据已知点的正常高。
五、试验分析
选取成都黄龙起伏较大的山区地带10 km×10 km的区域范围, 最大高差为100 m, 布设20个GPS水准点样本,进行四级联测,并作归一化处理。
分别建立样本点编号,构建编号的样本点如图2所示。
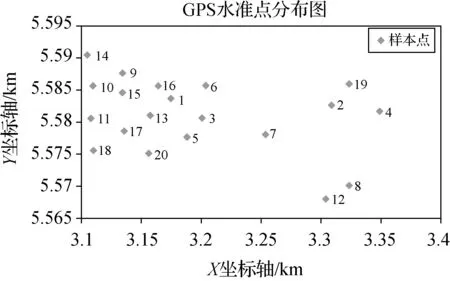
图2 样本编号点图
选取均匀的6、10、14个点作为样本训练集,剩余14、10、6个点作为测试集,构成3种不同的分组方案,分别应用于不同的训练模型中。表1为训练集与测试集的3种分组方案。

表1 训练集与测试集分组方案
模型评价指标是用来检验预测效果优劣的度量,本试验采用均方误差(MSE)来评价模型的内符合精度和外符合精度,计算公式为
式中, 内符合精度中Δξ为参与拟合计算的已知点值和拟合值的差值,n为训练点样本个数;外符合精度中Δξ为测试点的高程异常拟合值与高程异常实际值的差值,n为测试点样本个数。本文按照上述3种分组方案应用于不同的训练模型中,训练结果见表2。

表2 不同方案不同模型评价图 mm
由表2可知,在已知样本数据较小的情况下,3种训练模型(方案1)精度都比较高,体现了最小二乘支持向量机在解决小样本方面的优越性。通过对LS-SVM不同算法的改进比较得知,无论是内符合精度还是外符合精度,无论是整体还是单个点,基于地形改正的CPSO-FLSSVM训练模型都体现了更高的精确度,适用于本课题的研究使用。
六、结 论
考虑地形在内的混沌粒子群优化方法、模糊理论及最小二乘向量机模型,结合本文算例,可以得出以下结论:
1) 结合混沌搜索的随机性和遍历性特点,以及粒子群优化算法的高效局部搜索能力,将混沌粒子群优化方法应用于最小二乘向量机模型的参数选择上,避免了人为参数选择的不确定性,并且防止了陷入局部最优问题。
2) 将模糊思想引入最小二乘向量机模型,增加模糊隶属度属性,来表示样本对拟合贡献的程度,解决了LS-SVM对于孤立点过于敏感的问题,使得对影响模型精确度的参数的调整更为全面和精确。
3) 考虑到地形起伏对拟合精度的影响,将局部地形改正方法应用于地形起伏较大的山区地带,提高了山区地带的高程拟合精度。
参考文献:
[1] 于小平, 杨国东,王凤艳,等. GPS高程拟合转换正常高的研究[J].测绘科学,2007,32(2):40-41.
[2] 尹爱明,张楚. 转换GPS 高程的BP 神经网络方法研究[J].测绘科学,2008,33 (6):78-80.
[3] 孔令杰,李捷斌, 陈伟. 基于遗传算法的BP神经网络在高程拟合中的应用[J].工程勘察,2010,38(3):61-64.
[4] 黄玉磊,高飞.支持向量机方法在GPS 高程转换中的应用[J].工程勘察,2007(11):64-65.
[5] 谢波,刘连旺.支持向量机在GPS 高程异常中的应用[J]. 测绘科学,2011,36 (1):172-174.
[6] 周理含. 最小二乘支持向量机在GPS 高程转换中的应用[J].工程地球物理学报,2010,7 (2):243-247.
[7] 汤凯煌.基于地形改正的GPS高程异常曲面的拟合[J].矿山测量,2008(1):35-37.
[8] 黄磊,张书毕,王亮亮,等. 粒子群最小二乘支持向量机在GPS 高程拟合中的应用[J].测绘科学,2010,35 (5):190-192.
[9] 朱树先,张仁杰.支持向量机核函数选择的研究[J].科学技术与工程,2008,8(16):4513-4516.
[10] 礼野.模糊支持向量机及其在故障诊断中的应用[D].沈阳:沈阳航空航天大学,2011.
[11] 张兴福,刘成.综合EGM2008模型SRTM/DTM2006.0剩余地形模型的GPS高程转换方法[J].测绘学报,2012,41(1):25-32.
