海洋工程中多浮体系统的水动力研究综述
2014-08-11杨建民徐亮瑜
许 鑫, 杨建民, 李 欣, 徐亮瑜
(上海交通大学海洋工程国家重点实验室, 上海 200240)
海洋工程中多浮体系统的水动力研究综述
许 鑫, 杨建民, 李 欣, 徐亮瑜
(上海交通大学海洋工程国家重点实验室, 上海 200240)
随着深海油气开发和海洋大型装备的发展,多浮体系统越来越多地被使用。这些系统在波浪中存在着较为复杂的水动力干扰现象,在某些局部波浪会发生放大或遮蔽,从而使得其浮体间相对运动和受力的预报变得十分困难,因此对该问题的研究变得十分必要。该文对目前海洋工程中较为常见的多浮体系统进行了介绍,并就国内外在多浮体系统的水动力方面的研究进行了系统的阐述,包括水动力干扰理论研究、数值模拟研究以及模型试验研究等方面,最后对该课题未来的研究方向提出建议。
多浮体;水动力;相互作用
0 引言
近年来, 随着深海资源的开发和利用,以及海洋工程大型装备不断地更新和完善,涌现出大量的多浮体结构。在这些多浮体系统中,存在两个或多个浮体,且它们之间的间距较小,从而使其周围水动力相互作用变得十分显著。多浮体系统在波浪作用下,每个浮体对波浪的作用同时也会对其他浮体造成影响,某些局部波浪会发生放大或遮掩,浮体周围流体的运动变得十分复杂,尤其是浮体之间狭窄水道中流体发生共振时,非线性和粘性的作用非常明显,使得预报其浮体的相对运动和受到的流体作用力变得非常困难。
为了解决上述难题,需要对多浮体系统进行深入地探索,研究多浮体在波浪中的水动力相互作用,以及在其它联结机构或装备下的耦合作用,在此基础上可对作业过程进行准确预报,最终为实际施工作业提供指导。
1 常见多浮体系统简介
目前海洋工程中常见的多浮体系统主要有:FPSO(浮式生产储卸油平台,Floating Production Storage and Offloading Units)与穿梭游轮的原油外输系统、FLNG(浮式液化天然气生产装置,Floating Liquefied Natural Gas)与LNG(液化天然气船)的外输系统、浮式平台浮托安装系统、多个起重船联合起吊作业系统、海上超大型浮体以及钻井平台与内置浮力罐耦合系统等。
1.1 油气外输系统
油气外输系统是最为典型的海洋工程多浮体系统,由生产船体、外输船体、外输设备以及连接缆系组成,是FPSO或FLNG整个生产系统中很重要的部分。FPSO由于其良好的机动性、移运性和结构稳定性等优点,且具有较大的抗风浪能力,被广泛地应用于海洋石油勘探开发之中。FLNG是近年来发展的一项新技术,可以在气田附近的生产储卸装置上直接完成天然气的预处理、液化、储存及卸货,简化气田的开发过程,具有投资低、建造周期短、便于迁移的优点。
目前FPSO和FLNG外输方式主要可以分为:旁靠(如图1所示)和串靠(如图2所示)两种[1]。以原油外输为例,旁靠外输方式是将穿梭油轮的一舷系靠在FPSO的侧舷进行外输作业,通过系泊缆将外输油轮固定在FPSO一侧。此时FPSO与油轮两舷非常接近,中间仅间隔几米,常用橡胶护舷来吸收能量避免由于碰撞引起的船体损坏。串靠外输方式即一前一后的串联式外输方式,将油轮艏部通过系泊大缆连接在FPSO的艏部,两船间距一般为60 m~100 m。外输系统两船间的相对运动以及两船间缆系、靠垫上受力是设计中考虑的重要指标。

图1 旁靠外输系统 图2 串靠外输系统
1.2 海上安装中的多浮体系统
海上安装是海洋油气开发中不可缺少的一项技术,具有高风险、高附加值的特点,并伴随着海上平台数量的大幅扩张和尺寸的不断增大,成为海洋工程领域关注的热点。在安装作业中,整个系统包括工程作业船、平台、安装组块等多个浮体耦合作业,也是一种较为常见的多浮体系统。
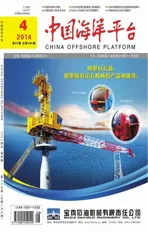
对于各类固定式平台和浮式平台上层模块的安装,通常有浮吊(如图3所示)和浮托(如图4所示)两种方法。浮吊法是使用大型的起重船将上部模块从运输驳船上整个吊起再放到平台下部结构上,目前在中小型平台安装中使用广泛。有时由于上部模块过大而超出了起重能力,需要使用多个起重船同时起吊作业。另一种方法称之为浮托法,是一种较新的大型组块安装方式,将安装的组块由运输驳船进入安装位置,使上部模块位于平台下部结构正上方,等待系泊稳定就位后通过驳船的升降设施将组块质量转移到平台下部结构上。一般对于导管架平台、半潜式平台使用单个驳船浮托安装,而重力式平台、Spar平台则通过两艘驳船完成安装。
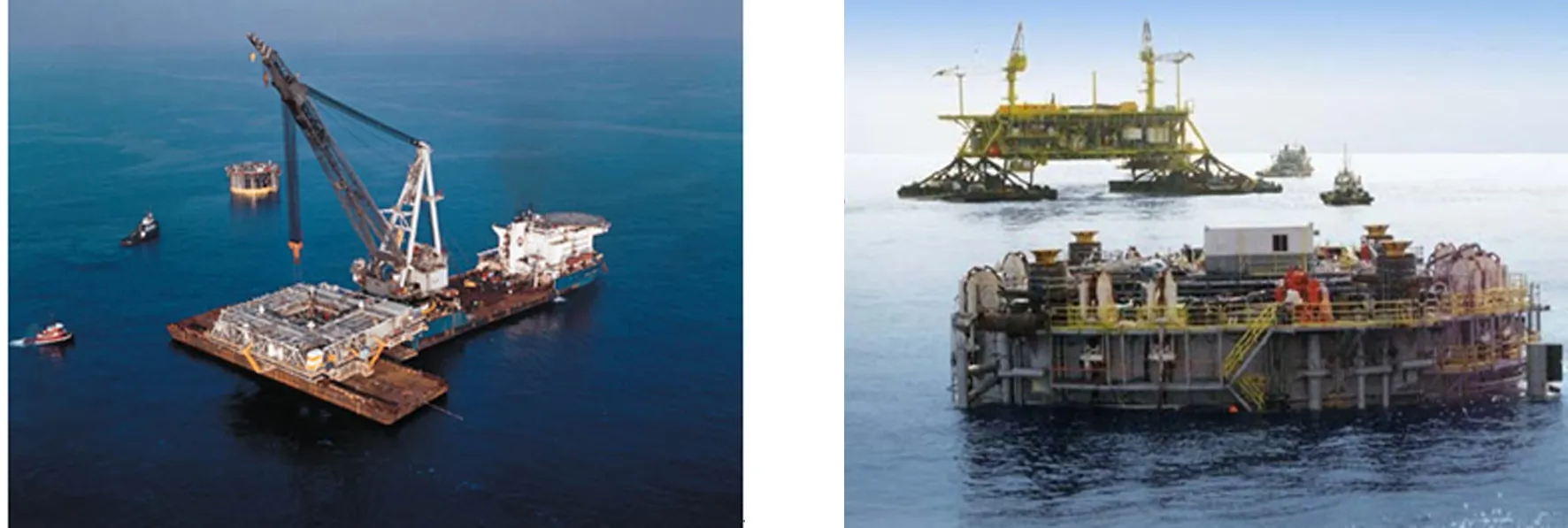
图3 浮吊法安装 图4 浮托法安装
1.3 海上超大型浮体系统
随着陆地资源的逐渐枯竭,超大型海洋浮式结构物(VLFS ,Very Large Floating Structure)被越来越广泛地使用,用来进行海洋空间利用和海洋资源开发。常见的VLFS有海上移动式基地(MOB),海上储油仓库(如图5所示),海上机场(如图6所示)和海上避风港等。超大型海洋浮式结构物通常由很多个浮体组成,每个浮体长达几百米甚至几千米,其间距一般很小只有几米。预报VLFS在海上的运动以及其间距对多个浮体的影响也离不开多浮体水动力的研究。

图5 移动式海上储油基地 图6 海上机场
2 国内外多浮体水动力研究概况
2.1 多浮体干扰的理论研究
多浮体水动力干扰理论研究主要是关注浮体间水体的运动以及对浮体作用力和运动的影响。它的发展是以单体水动力理论为基础,但也存在特殊性和复杂性。
最早关于多浮体水动力的研究始于20世纪六十年代,主要基于二维的切片理论。Ohkusu[7]1969年采用Ursell的多极展开法将原单个圆柱升沉运动的经典求解方法发展到两个圆柱体的水动力计算,得到了很好的效果。随后Ohkusu[8]又采用二维切片方法研究了船体在另一个结构物周围的摇荡问题,研究结果表明,小浮体在大浮体迎浪与背浪情况下的水动力响应有所不同,存在着较为明显的波浪遮蔽效应。Kodan[9]1984年将Ohkusu的方法推广并应用于两个平行细长体在斜浪中的水动力干扰问题,计算结果与试验结果相比较,证明了在无航速情况下采用切片方法预报两体干扰问题是有效的。Fang和Kim[10]1986年采用二维切片法预测斜浪中两船前进的水动力耦合运动,假定某单船运动而另一艘不动的物面边界条件,分别计算两船自由漂浮的附加质量和阻尼系数,最终得到两船在波浪中的运动,研究结果表明,考虑耦合的两船运动和单船情况完全不同,并且两船时横摇幅值较单船显著减小。
随着水动力理论研究和计算机硬件的发展,研究方法从二维的切片理论发展到直接的三维数值模拟。Van Oortmerssen[11]1979年推广了Faltinsen提出的三维势流理论的面元法,使用其中一个物体不动另一个物体自由运动的物面条件,分别计算了无航速下圆柱与方盒的相互干扰水动力系数并与模型试验结果进行比较,结果对比较好。Loken[12]1981年同样采用面元法分析了波浪中多个邻近船体的运动,并计算波浪慢漂力,在共振区域外取得了很好的结果,但在共振周期附近计算值远远大于试验值。
1986年Kagemoto和Yue[13]在已知每个物体的绕射势的基础上,通过精确代数方法叠加计算得到多模块组成的结构在波浪下的绕射势,这种方法称为波浪交互理论,此方法能够大大提高计算效率,适合计算浮体数目较多的情况,但是一般只适用于无交叉垂直投影的阵列。1987年Mavrakos和Koumoutsakos[14]基于这种方法与近似特征函数进行展开,采用一种准确的分析公式计算一致速度势。
高阶的边界元方法的应用,大大提高了计算精度。2005年S.Y.Hong[15]使用高阶边界元法(HOBEM)计算多浮体在频域下的水动力参数,同时开展了相应的模型试验。结果表明,高阶边界元法得到的运动和慢漂力能够更好的吻合实验结果。但是,当浮体间距非常小时,因为间隙水体发生共振导致计算结果过大从而难以预报;此共振现象最剧烈情况发生在首迎浪,并随浪向从船首向船侧的移动而减弱。
随着计算机的进一步发展,出现了直接的时域求解方法。2010年S.Y.Hong[16]使用有限元法直接求解时域Laplace方程,得到多体水动力干扰时域结果,并与模型试验结果对比,发现时域有限元方法和实验结果的吻合程度明显优于频域的高阶边界元方法和普通边界元法。但此种方法计算速度慢,不便于做长时间的时域模拟。2010年Lu[17]使用有限元法求解二维N-S方程,并使用CLEAR-VOF方法模拟自由表面,对一个由三个矩形浮体旁靠的系统进行研究,计算小间隙中流体的运动,得到小间隙中的波数与前人已发表的结果一致,并且计算得到浮体的水平作用力。
此外,对多浮体系统的水弹性分析与流固耦合方面,也有一些学者做过不少研究。2002年沈庆等[18]对于铰联结系泊多浮体系统, 将其作为铰联结无根树系统, 用多刚体力学休斯顿方法进行了运动学分析。选定广义速率后用其表达出多浮体系统的各种有关运动量。进而使用多刚体力学的Kane方程, 并补充以必要的运动学约束关系, 导出了求解系泊多浮体系统各浮体质心位移和摇荡角位移的动力学方程组。最后归结为可求解各项位移、角位移幅值和相位的复数线性代数方程组。陈徐均等[19]引入浮体势流流固耦合理论和多刚体力学的凯恩方法对浮基多刚体系统进行动力分析。在分析中考虑入射规则波的影响和上部作业物体进行回转作业、升降作业的影响,建立了浮基多刚体系统的运动方程,讨论了浮基多刚体系统运动方程在三类情况下的求解途径。
2.2 多浮体干扰的数值模拟研究
在水动力干扰理论研究的基础上,国内外学者们开展了大量的数值计算研究。以下主要从频域水动力分析、时域耦合分析、二阶波浪力计算、阻尼的考虑和修正等方面归纳阐述。
2.1.1 频域水动力系数计算
1999年Inoue[20]使用三维源汇法,计算了FPSO与LNG旁靠状态下的一阶波浪力、附加质量和阻尼系数,并使用远场积分Newman近似方法得到平均慢漂力,并与模型试验结果对比。通过对比运动的RAO和时例发现,纵摇和垂荡的运动与实验结果吻合较好,但横摇和首摇运动由于未考虑粘性阻尼的影响与实验结果相差较大,横荡和纵荡运动由于二阶低频力难以预报也与实验结果相差较大。
谢楠、郜焕秋[21]1999年使用三维线性理论计算两个浮体在波浪中的水动力参数并与实验结果对比,说明了程序的可靠性。结果还表明:如果两个相距较近的浮体漂浮在波浪中,作用在每个浮体上的流体动力将与仅有单个物体的情况不同。由于相邻物体的遮蔽效应及波浪反射的影响,作用在其中一个物体上的波浪力也会变化。此外,由于相邻物体的辐射波作用,另一个物体也会受到附加的辐射力。
2000年Teigen[22]研究了TLP平台和驳船旁靠状态下的水动力干扰,同样使用三维线性势流理论计算水动力参数,并与不考虑相互干扰的结果进行比较。研究表明,在某些局部出现波浪增大或遮蔽的现象,一阶波浪力和慢漂力对于另一个物体的存在影响显著;考虑水动力耦合与未考虑耦合的结果相差较大,因此研究两体之间的水动力干扰是非常必要的。
陈徐均等[23]使用频、时域混合法预报多浮体结构在波浪中的运动响应,并根据确定不规则波的跨零频率,用频域法求解浮体的水动力系数,适时求解非线性锚链力等外力,方程求解时引入动力有限元中的增量平衡方程。利用该方法预报了由 6个单体组成的中空浮动结构对波浪的运动响应,并与试验结果进行了比较,数值结果与试验数据具有较好的吻合程度。陈徐均等[24]使用三维线性势流理论对小间隙多浮体系统的水动力进行计算研究,得到浮体的运动和受力,并分析浮体间距对水动力参数的影响,得到水动力系数的变化幅度随着浮体间距离增大而变小;随着浮体间距的变化,水动力系数极值的出现具有明显的规律,相邻的极大值(或极小值) 的间距为半个波长或一个波长。
滕斌、何广华[25]采用半解析的比例边界元法求解浮箱直接相互作用水动力参数,结果和边界元方法比较基本一致,此方法比边界元方法的计算时间节省很多。
朱仁传[26]基于三维频域势流理论,采用数值模拟方法计算了具有小间隙的圆筒形和箱形浮体、并列箱形等多浮体系统的波浪力和水动力相互作用的附加质量和阻尼系数等,分析了间隙对多浮体系统的水动力性能的影响,结果表明,无论是波浪力还是浮体间相互作用的水动力系数在某些频率上都存在着强烈的共振现象,但共振无法准确预报。
2.1.2 时域耦合分析
研究多浮体系统,除了关注浮体间水动力干扰作用以外,还要研究多浮体间的水动力和浮体间其它连接机构的耦合作用。一般这些连接机构对浮体运动的影响都是非线性的,所以通常都采取时域非线性耦合分析方法。
目前对时域耦合分析研究主要集中在工业界,即对实际工程的时域模拟,尤其是针对FPSO-Shuttle或FLNG-LNG船旁靠或串靠的外输系统的模拟最为多见。
1999年Inoue和Islam[20]通过时频转换方法将频域水动力参数转换成时延函数代入时域运动微分方程,计算不规则波作用下的运动和受力,最后与模型试验结果对比。结果表明,横摇和首摇运动由于未考虑粘性阻尼的影响与实验结果相差较大,横荡和纵荡运动由于二阶低频力难以预报也与实验结果相差较大。
2001年Buchner B[27]运用频域计算得到的水动力参数对FPSO和LNG旁靠进行时域模拟,并在横向运动上增加线性阻尼项修正,最后与模型实验结果相比较。结果表明,两船间隙处的波面升高远超过实验值。首迎浪时,横向的运动相比于实验较大,通过在横向运动上增加线性阻尼可以有效修正横向的低频运动。
2005年Inoue[28]使用时域耦合方法模拟了一艘VLCC和一艘服务船旁靠状态时在风浪流作用下的运动,波浪作用通过频域的水动力参数求得,风力和流力通过OCIMF (1977)给出的经验公式得到,此外还考虑两船直接的靠垫作用以及各自的锚链和系泊缆的影响。
2009年Hong[29]对一艘FPSO与LNG终端船的旁靠系统在不规则波浪下进行时域模拟。FPSO采用单点系泊,两船之间通过系泊缆和弹性护舷联接,时域模拟时考虑护舷的非线性刚度,其中水动力参数通过频域计算软件WAMIT得到,通过时频转换将频域水动力参数转成时域,并代入时域运动方程,得到两船分别的运动结果和锚链上受力,并与模型试验相对比,结果表明,在波频运动方面对比较好,低频运动方面还存在一些差别,低频力的模拟还需要改进。
2.1.3 二阶波浪力的预报
研究多浮体水动力干扰,衡量相互之间的影响,仅仅线性理论分析是不够的,研究表明,在间距较小时二阶波浪力发挥的作用不可忽略。目前在计算二阶波浪漂移力方面,被广泛使用的方法是近场法和远场法。近场法由Ogilvie[30]1983年提出,是直接通过湿表面上的压力积分得到,它可以分别得到每个浮体上6个自由度方向受到的波浪漂移力,但是计算复杂,需要计算湿表面上的速度势和水线面附近的相对波高,且计算精度对网格的要求较高。远场法由Maruo[31]和 Newman[32]提出,是通过动量守恒的原理在无穷远处的控制面上积分得到,这种方法计算简单且精度较高,但是只能计算3个水平运动自由度方向的漂移力,且只能得到整个多浮体系统受到的漂移力。Chen[33]针对多浮体二阶波浪力的计算提出一种新的中场法,它是通过在每个浮体附近内建立一个控制面,该控制面联系近场和远场的边界条件,最终在此控制面上积分得到波浪漂移力,这种方法同时具备了近场和远场的优点,既可以计算每个浮体上6个自由度方向的受力,又可以保持较高计算精度。
Inoue[34]使用远场方法对FPSO和LNG的旁靠和串靠情况在不规则短峰波下的波浪漂移力进行了计算,并与模型试验相对比,结果较为可靠,但由于是远场法,不能得到每个船体上的波浪漂移力。Kashiwagi[35]针对旁靠的两个船体,使用高阶边界元方法计算速度势,并分别使用近场积分和远场积分方法求解二阶慢漂力,将近场积分得到的每个浮体上的慢漂力求和后与远场积分得到的结果比较,吻合较好,同时与模型试验结果相比较,同样也吻合良好,充分证明了近场积分方法的可靠性。Malenica[36]使用中场积分方法对一条矩形船体和一条Wigley船体的旁靠系统求解其二阶慢漂力,并与模型试验结果相对比,结果吻合良好,证明了中场积分公式的可靠性。
2.1.4 阻尼的考虑和修正
Inoue[37]在使用线性势流理论求解FPSO-LNG旁靠系统在波浪中的受力和运动时,发现船体横摇运动在某些频率上出现过分的夸大,经分析是由于未考虑粘性阻尼的原因,通过在势流阻尼上增加粘性阻尼的修正能够得到较好的结果,并能与试验结果吻合。此外,在预报间距非常小的两个船体运动时发现,间距中自由液面附近的流体在某些频率上非常不真实地剧烈振荡,从而导致二阶力传递函数(QTF)随之失真。针对这个问题,Huijsmans[38]在浮体间距的自由液面上增加刚性盖子的边界条件,类似于去除不规则频率的方法,在数值上去压制间距中自由液面的升高,最终使得QTF结果趋近真实。Newman[39]使用广义模态的阻尼方法来减小间距自由液面升高和QTF结果。Fournier和Chen使用拟理想流体假设,在自由表面边界条件上增加耗散项,相当于在自由表面处增加了阻尼盖,通过调节耗散系数来控制自由表面升高,从而控制QTF数值,通过试验验证效果较为显著。Pauw使用了Chen的方法对4 m间距的FPSO-LNG系统进行研究,将耗散系数取值从0.01到0.05,分别计算波浪漂移力,在共振频率处差异明显,足以说明耗散系数的作用和敏感性,最后通过试验来确定了耗散系数的大小。
2.3 多浮体干扰的模型试验研究
除了理论和数值的研究方法,还可以通过模型试验的方法来研究多浮体水动力作用。目前诸多的多浮体模型试验大多来自于实际工程项目,通过模型试验能够更好地验证数值计算的结果,优化数值计算模型。但是专门从机理上去研究多浮体水动力干扰特性的试验研究并不多。
S.Y.Hong研究锚泊状态下的FPSO和LNG旁靠和串靠两种系统(如图7、图8所示),分别进行规则波和不规则波试验,测得运动和相互作用力。结果表明,串靠时波浪的遮蔽作用对低频运动的影响较为显著,对波频运动影响不明显,另外串靠间距变化的影响较小;旁靠时船体间相互干扰不仅存在于低频运动,在波频部分也有剧烈的影响。Gerrit de Boer和 Buchner B通过模型试验对阻尼进行了更深入的研究,分别针对LNG和FPSO的旁靠以及LNG与座底式混凝土平台旁靠(如图9、图10所示),分别选取旁靠间距3 m、6 m、9 m,水深为15 m和25 m,进行静水衰减运动实验测得固有周期和阻尼系数。测量结果表明,阻尼随着水深的增加而增加;随间距的增加,变化则不够明确,纵荡阻尼随间距的增加稍稍增加,横荡阻尼随间距的增加稍稍减小,而横摇纵摇阻尼变化无明确趋势。

图7 串靠系统的模型布置 图8 旁靠系统的模型布置
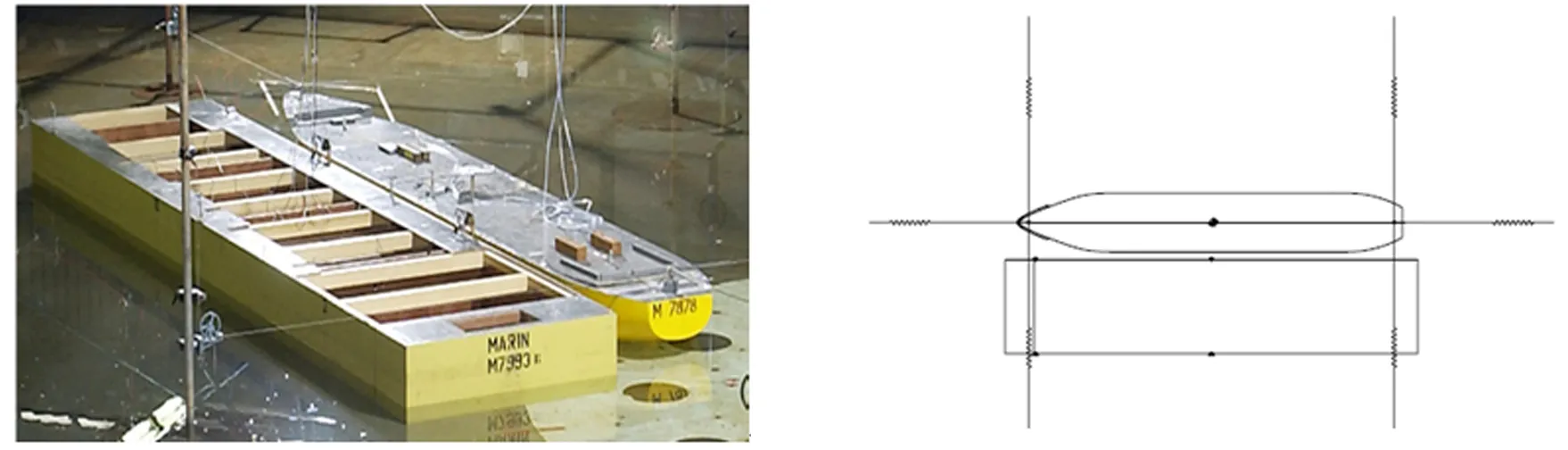
图9 FPSO外输模型试验 图10 模型试验的系泊弹簧布置
3 结语
多浮体系统的水动力干扰是目前国内外海洋工程领域研究的一个热点问题,已有诸多研究工作者对此做过研究。该文分别从理论研究、数值模拟以及模型试验方面分别阐述,其中数值模拟部分包括频域的水动力参数计算、时域耦合分析、二阶波浪漂移力分析和粘性阻尼的考虑与修正。但目前仍然存在诸多未解决的难题,例如对于较小间隙内流体的强非线性运动的直接模拟,间隙内流体运动发生共振时的波面升高计算,以及粘性力在水体共振时发挥的作用等。
随着理论分析、计算机性能和试验技术越来越成熟,多浮体的研究应考虑从线性理论向非线性理论、频域分析向直接时域分析、无粘流体计算向粘性流体计算等方向发展,试图发展更完善而有效的理论和数值方法。此外,模型试验研究应更多关注多浮体水动力干扰的机理性研究,试图为理论基础提供有力指导。
[ 1 ] 王强.FPSO串靠外输时的多浮体系统响应分析[D]. 哈尔滨: 哈尔滨工程大学, 2010.
[ 2 ] Ye W, Luo Y, et al. LNG Floating Regasification Unit (FRU) Side-By-Side mooring analysis[C]. 24th International Conference on Offshore Mechanics and Arctic Engineering. Greece: OMAE, 2005-67117.
[ 3 ] Naciri M, Waals O, et al. Time domain simulations of side-by-side moored vessels lessons learnt from a benchmark test[C]. Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering. San Diego: OMAE, 2007-29756.
[ 4 ] 李达, 范模, 易丛等. 海洋平台组块浮托安装总体设计方法[J]. 海洋工程, 2011,(03): 13-22.
[ 5 ] 李金玉, 商辉, 陈刚等. 深水起重铺管船作业性能理论与试验研究[J]. 海洋工程, 2010, 28(04): 33-39.
[ 6 ] 崔维成, 吴有生, 李润培. 超大型海洋浮式结构物开发过程中需要解决的关键技术问题[J].海洋工程, 2000, 18(03): 1-8.
[ 7 ] Ohkusu M. On the heaving motion of two circular cylinders on the surface of a fluid [M]. Reports of Research Institute for Applied Mechanics, XVII, No.58, 1969: 167-185.
[ 8 ] Ohkusu M. Ship motions in vicinity of a structure[C].Proc. 1st Intl. Conf. on the Behaviour of Off-Shore Structures, Trondheim, BOSS ’76, 1976: 284-306.
[ 9 ] Kodan N. The motion of adjacent floating structure in oblique waves[C]. Proc. 3rd offshore mechanics and Arctic eng. conference, vol. 1.1984: 206-213.
[10] Fang M C,Kim C H. Hydrodynamically coupled motions of two ships advancing in oblique waves [J]. Journal of Ship Research, 1986,30(3):159-171.
[11] Van O G. Hydrodynamic interaction between two structures of floating in waves.[C]. Proc. Boss ’79. 2nd int’l conf. on behavior of offshore structure. 1979: 339-356.
[12] Loken A E. Hydrodynamic interaction between several floating bodies of arbitrary form in waves [C]. Proc. of int’l symposium on hydrodynamics in ocean engineering, NIT, 1981,(2): 745-779.
[13] Kagemoto H,Yue D K P. Interactions among multiple threedimensional bodies in water waves: an exact algebraic method [J]. Journal of Fluid mechanics. 1986,(166): 189-209.
[14] Mavrakos S A, Koumoutsakos P. Hydrodynamic interaction among vertical axis-symmetric bodies restrained in waves [J]. Applied Ocean Research, 1987,(9):3.
[15] Hong S Y, Kim J H, et al. Numerical and experimental study on hydrodynamic interaction of side-by-side moored multiple vessels [J]. Ocean Engineering, 2005, 32(7): 783-801.
[16] Hong S Y. Nam B W. Analysis of second-order wave force on floating bodies using FEM in time-domain [C]. Proc. of the 21st Int’l Offshore and Polar Engineering Conference, Beijing , ISOPE, 2010: 372-378.
[17] Lu L,Cheng L, et al. Numerical investigation of fluid resonance in two narrow gaps of three identical rectangular structures [J]. Applied Ocean Research, 2010, 32(2): 177-190.
[18] 沈庆, 陈徐均. 系泊多浮体系统流固耦合和浮体间耦合动力分析[J]. 中国造船,2002,43(02): 81-84.
[19] 陈徐均, 沈庆. 浮基多刚体系统动力分析[J]. 工程力学,2002,19(05): 139-143.
[20] Inoue Y,Islam M. Relative Motions of Multiple Floating Offshore Structures[C]. Proc. 18th offshore mechanics and Arctic eng. conference. Canada, OMAE, 1999.
[21] 谢楠, 郜焕秋. 波浪中两个浮体水动力相互作用的数值计算[J]. 船舶力学, 1999, (02): 7-15.
[22] Teigen P. Numerical aspects of multiple body hydrodynamics [C]. Proc. of the 12th Int’l Offshore and Polar Engineering Conference, Seattle, WA, USA, ISOPE, 2000,1(2): 165-173.
[23] 陈徐均,孙芦忠,刘艇等. 频时域混合法求多浮体系统的不规则波运动响应[J]. 解放军理工大学学报(自然科学版), 2000,1(2): 43-46.
[24] Chen X J, Cui W C. New Method for Predicting the Motion Responses of A Flexible Joint Multi-Body Floating System to Irregular Waves [J]. China Ocean Engineering, 2001, (04): 491-498.
[25] 滕斌, 何广华,李博宁等. 应用比例边界有限元法求解狭缝对双箱水动力的影响[J]. 海洋工程, 2006, 24(02): 29-37.
[26] 朱仁传, 朱海荣,缪国平. 具有小间隙的多浮体系统水动力共振现象 [J]. 上海交通大学学报, 2008,42(08): 1238-1242.
[27] Buchner B A, Van D, et al. Numerical multiple-body simulations of side-by-side mooring to an FPSO [C]. Proc. of the 11th Int’l Offshore and Polar Engineering Conference, Stavanger, ISOPE, 2001: 343-353.
[28] Inoue Y. Numerical simulation on mooring performance of LNG-FPSO system in realistic seas[C]. Proc. 24th offshore mechanics and Arctic eng. conference, Halkidiki, OMAE, 2005.
[29] Hong Y P, Wada Y, et al. An experimental and numerical study on the motion characteristics of side-by-side moored LNG-FPSO and LNG carrier[C]. Proc. of the 19th Int’l Offshore and Polar Engineering Conference, Osaka, ISOPE, 2009: 172-179.
[30] Ogilvie T F. Second order hydrodynamic effects on ocean platforms [C].International Workshop on Ship and Platform Motion, Berkeley, USA 1983: 205-265.
[31] Maruo H. The drift of a body floating on waves [J]. Journal of Ship Research, 1960,(4): 1-10.
[32] Newman J N. The drift force and moment on ships in waves [J]. Journal of Ship Research, 1967, 11 (1): 51-60.
[33] Chen X B. Hydrodynamics in Offshore and Naval Applications-Part 1 [C].Keynote lecture at the 6th International Conference on Hydrodynamics, 2004: 1-20.
[34] Inoue Y. Numerical investigation of slowly varying drift forces of multiple floating bodies in short crested irregular waves [C]. Proc. of the 10th Int’l Offshore and Polar Engineering Conference, Seattle, WA, ISOPE, 2000: 174-182.
[35] Kashiwagi M, Endo K, et al. Wave drift forces and moments on two ships arranged side by side in waves [J]. Ocean Engineering, 2005, 32(5-6): 529-555.
[37] Inoue Y. Effect of viscous roll damping on drift forces of multi-body floating system in waves[C]. Proc. of the 11th Int’l Offshore and Polar Engineering Conference, Stavanger, Norway, ISOPE, 2001: 279-285.
[38] Huijsmans R H M, Pinkster J A,Wilde J J. Diffraction and radiation of waves around side by side moored vessels[C]. Proc. of the 11th Int’l Offshore and Polar Engineering Conference, Stavanger, Norway, ISOPE, 2001: 406-412.
[39] Newman. Application of generalized modes for the simulation of free surface patches in multi body hydrodynamics [M]. Wamit consortium report.
Review of the Research on Multi-body System Hydrodynamics
XU Xin, YANG Jian-min, LI Xin, XU Liang-yu
(State Key Laboratory of Ocean Engineering, Shanghai Jiao Tong University, Shanghai 200240, China)
With the exploitation of deep-sea oil and gas and development of marine large equipment, many multi-body systems are emerging at sea. Since hydrodynamic interaction between each body of the system is very complex, as well as shielding and exaggerating effect of wave motion appear in some areas, the simulation of relative motion and load between each body becomes more difficult. Hydrodynamics of multi-body system is becoming one of hot topics at present. Some common offshore multi-body systems are presented in this paper, and a comprehensive review is also introduced about the recent research on multi-body system hydrodynamics in the world, including theoretical research, numerical simulation and model test. Numerical simulation includes hydrodynamic interaction analysis between each body, coupling analysis in time domain, calculating the second order wave drift force, and modification considered viscous effect. The suggestions for further studies in this field are proposed as well.
Multi-body; hydrodynamics; interaction
2013-09-18
国家自然科学基金资助(50979057)。
许 鑫(1988-),男,博士生。
1001-4500(2014)04-0001-08
P75
A