基于激光陀螺的变形测量系统方案设计*
2014-08-10马驰新刘素珍
马驰新 刘素珍
(92941部队95分队 葫芦岛 125001)
1 引言
舰船甲板变形[1]的原因包括三个方面:一是由于舰艇载荷的变化导致重力分布发生变化;二是温度变化、舰船钢板疲劳和结构变化;三是平台运动过程中收到海浪冲击、武器发射产生的冲击,导致平台挠曲。其主要影响是造成用户设备所处地域安装的导航设备或武器装备的水平、方位基准与舰船主惯导部位的水平、方位基准[2]间出现偏差,直接影响试验和使用效果。舰船变形对惯性导航系统海上试验影响很大,但其破坏作用主要发生在被试惯性导航系统中具有零位基准的设备安装基座和测量设备安装基座的局部变形。基于激光陀螺原理的变形测量系统就是为消除其对试验的影响而设计的。
2 激光陀螺工作原理
激光陀螺是一种光学陀螺,通过光波频率差测量角速度,是一种新型的惯性器件[3]。把一个光学频率的振荡器组装成一个激光器[4]。可用3面镜子构成三角形的光路。如果在光路的任何一点上产生一条光束,它便可以沿着这条闭合光路船舶,一次在每个镜面处反射,然后又回到起始点。当返回的的光束与发出的光束相同时,便会发生持续的光学震荡。两条这样的光束独立形成,一条顺时针方向行进,另一条逆时针方向行进。当敏感器在惯性空间里固定不动时,两条光束具有同样频率,当敏感器绕垂直于光束平面的轴线旋转时,两条光束光程发生变化。光程较长的光束频率降低,另条光束频率提高,从而是每条光束频率变化能够维持激光器运行所需的谐振条件。
光程微小变化导致频率的微小变化,差拍频率Δv表达式为

式中,A为腔体面积;Ω为敏感器旋转速率;c为光速;L为周长。
激光陀螺就是通过测量正反两束光之间的频率差来实现对输入转速的测量[5]。
3 形变测量的原理
基于激光陀螺具有高精度的角位置测量能力,通过三个相互正交安装的激光陀螺构成的组合体(LGU)可精确测量出不同位置的角度矢量。利用两套LGU输出的角度矢量的差值中包含的运动平台形变角的特征,采用左右顾及方法对产值信息进行处理,即可获得运动平台的形变大小和基准失准角。船体角变形测量方法的基本原理是两套LGU对同一船体角运动矢量进行测量,通过比较两套系统输出的角度测量值的差异,得到船体变形和相互之间的坐标关系,测量原理如图1所示。

图1 角变形测量原理图

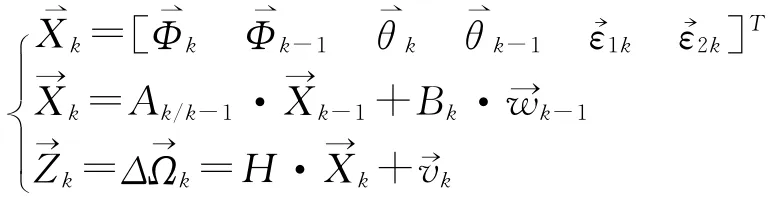
→φ为总变形角矢量,→ε1和→ε2分别为激光陀螺测量误差角速度矢量。通过引起角变形模型和激光陀螺的误差模型,可得到如下的Kalman滤波方程。
4 系统设计
基于激光陀螺的变形测量方法的基本思想是基于激光陀螺具有高精度的角位置(优于0.1″)测量能力,通过三个互相正交安装的激光陀螺构成的组合体(LGU)可精确测量出所在位置的三维角度矢量,利用两套LGU分别精确测量出不同位置的角度矢量。由于这两套LGU输出的角度矢量的差值中包含了运动平台变形角的特征,因此采取最优估计方法对这个差值信息进行相关处理[6~7],即可获得运动平台的变形角大小和基准失准角。
4.1 变形测量系统组成
变形测量系统由两套LGU(Laster Gyroscope Unit,由三个相互正交安装的单轴激光陀螺构成的激光陀螺组合体的简称)、三组外部电源、两部计算机、GPS天线和时统模块组成。
4.1.1 惯性测量单元(IMU)设计
惯性测量单元包括三个二频机抖激光陀螺、三个石英加速度计、数据采集板、温控板和支撑架等,用于敏感载体三维线加速度和加速度,并采集陀螺和加速度计的输出等;电子线路单元包括旋转控制板和电源模块。
IMU设计为可独立拆装的独立组件,可通过四个螺钉与系统底板固联,电气接口设计为一个可拔插多芯接插件与系统电气部分相连。在舰船上进行更换维护时,只需松开四个螺钉、拔掉接插件即可取下IMU。
IMU内部分成两大部分,即台体和支架。其中台体用于安装激光陀螺和加速度计,支架用于支撑台体,台体和支架之间通过橡胶减振器连接,从而隔离惯性元件与外部环境之间的噪声互扰。此外在支架内侧表面还可设置密闭的磁屏蔽材料,将惯性元件与外部磁干扰环境隔离。
为使安装误差标定[8]和维修更换有基准,IMU支架外侧有供定位用的水平和方位基准靠面。
4.1.2 时统模块

图2 时统单元组成框图
时统模块包含GPS接收机,主要作用测量设备提供速度数据、位置数据、秒脉冲和时标信息。利用授时GPS组成时统分系统,时统分系统主要由高稳定度晶振、对时线路、分频及计时电路、延时调整线路、输入输出接口电路等组成。具体原理框图如图2所示。
铷原子频标输出的信号经放大整形处理后,进入分频链进行分频,得到1Hz的秒信号,秒脉冲信号与授时GPS接收机输出的秒同步信号进行对准。1Hz的秒信号通过对时校时处理,得到与授时GPS同步运行的时钟秒信号,该时钟秒信号进入单片机进行时间计数,得到年月日时分秒的时间信号,1KHz信号经过24bit计数器得到毫秒信号。输送给数据处理系统计算机的数据为:年月日、时分秒、秒信号及毫秒信号等。主要技术指标如下:
GPS对时误差 ≤1μs;
B码对时误差 ≤10μs;
计时电路最大延时误差 ≤30ns;
延时调整范围 1~999999μs。
4.2 技术方案
由于主惯导与子惯导[9]安装于不同甲板,两者的安装位置之间存在甲板变形,为正确评价局部基准的技术指标,使用变形测量系统测量子惯导的安装基座与主惯导设备安装基座之间的变形。其中LGU1在捷联安装于主惯导设备旁边,LGU2捷联安装于子惯导设备旁边。数据录取装置同步录取子惯导设备的姿态、位置及速度信息,主惯导的姿态、位置及速度信息,GPS时间信息。设备安装示意图如图3所示。

图3 设备安装示意图
4.3 主要战技指标
≤25″(RMS)。
5 变形测量系统测量精度实验测试
5.1 测试方案
以某型测量船作为搭载试验平台,利用光学变形监测系统作为参考基准检验激光陀螺自主变形测量系统精度。两套LGU分别安装于联合基座上。利用GPS时统模块实现时间同步,利用数据处理计算机实时接收LGU输出的单个基座的角度变形量,通过数据处理与计算得到联合基座的相对变形量。光学监测系统[10]主要包括发射模块、接收模块和光学通道,发射模块包括平行光管,接收模块包括CCD成像系统和数据解算单元。发射模块、接收模块和LGU一体安装于联合基座上,发射模块的平行光管敏感联合基座1的纵向和横向角度变化,接收模块的CCD成像系统接收平行光管发射的光线,通过成像计算后得到两个联合基座之间的角度变形量,与两套LGU解算得到的角度变形量进行比对,从而达到检验LGU测量角度变形量精度的目的。LGU和光学监测系统安装示意图如图4所示。

图4 变形测量系统与光学标校系统安装示意图
5.2 测试结果
共进行了三个航次的试验,其中一个航次试验结果如图5所示。从对比结果可以看出,光学变形测量结果与自主变形测量结果基本一致。试验结果表明:激光陀螺变形测量系统的测量精度优于25″。

图5 自主变形测量与光学测量对比结果
6 结语
本文通过对甲板相对变形测量方法研究及系统设计,主要测量被试装备和测试设备之间的甲板变形,得到舰船航向和姿态信息真值。对于完成不同设备间的相对变形测量任务具有实际意义。
[1]郑梓祯,刘德耀,等.船用惯性导航系统海上试验[M].北京:国防工业出版社,2006:8387.
[2]中国惯性技术协会,中国航天电子技术研究院.惯性技术词典[M].北京:中国宇航出版社2009:112113.
[3]严恭敏,李四海,秦永元.惯性仪器测试与数据分析[M].北京:国防工业出版社,2012:35.
[4]刘元正,张明辉,张华伟,等.激光陀螺腔长控制镜改进设计[J].中国惯性技术学报,2013,21(2):235236.
[5]张天光,王秀萍,王丽霞,等.捷联惯性导航技术[M].北京:国防工业出版社,2010:8285.
[6]邓志红,刘亚辰,王清哲,等.转台角位置基准误差对激光捷联惯导标定的影响分析[J].中国惯性技术学报,2009,17(4):498504.
[7]杨晓霞,黄一.外场标定条件下捷联管道惯导系统误差状态可观测性分析[J].中国惯性技术学报,2008,16(6):551558.
[8]査月,李德彪,魏学通,等.基于联合基座的天文/惯性组合测量系统的静态标校方法[J].中国惯性技术学报,2007,15(6):756759.
[9]中国惯性技术协会,中国航天电子技术研究院.惯性技术词典[M].北京:中国宇航出版社,2009:174175.
[10]蔡迎波,李德彪.基于激光干涉条纹的联合基座相对变形测量方法[J].中国惯性技术学报,2011,19(1):122126.
