基于机器视觉的非接触式液位测量方法研究
2014-08-02刘琼伟沈继忱
李 静 刘琼伟 王 璐 沈继忱
(东北电力大学,吉林 吉林 132012)
为保证工业生产的安全性,需对石油、化工厂中成千上万的储罐进行液位在线检测。考虑到温度、压强及化学性质等因素,罐体常处于非敞口状态。对该类储罐液位的测量根据传感器是否接触待测液体可分为接触式和非接触式两种方法。由于采用接触式测量时需要传感器与待测液体直接接触,在测量易燃、易爆类液体时有可能由于传感器放电而存在安全隐患,因此在这些应用场合,必须使用非接触式传感器。目前应用较多的是超声波测距,该方法具有测量精度高、安全性高等优点,但存在受到不均匀温度场的干扰及测量介质不均匀时测量误差较大等不足。
利用图像传感器与计算机图像处理算法相结合的技术方法可以克服上述难题。文献[1]中提出了利用激光三角测量原理和角位移同步跟踪来提取液位图像的方法,并构建了斜三角系统、角位移跟踪系统及多光源系统等多种测量模型。徐驰等提出以CCD摄像机采集的液位和钢尺图像为基础,通过钢尺刻度识别、钢尺刻线和液位识别三大识别模块完成液位高度测量,根据液位高度反馈控制电机带动CCD相机跟随液位,实现实时自动跟踪测量[2]。杨秀君提出对采集的容器内液面图像采用积分投影法判断液位线,并通过Hough变换、链码跟踪+曲线拟合对液面高度实现精确定位,从而得到液面的高度[3]。白莹提出基于像素点位置和面积的两种液位测量方法,并对液位晃动进行了分析和验证[4]。
利用计算机图像识别技术,建立适用性强、处理效率高的液位测量模型,实现液位的精确读取具有实际工程意义。笔者建立了一种基于CMOS传感器的封闭式罐体液位在线测量模型。利用微功率激光源和图像传感器搭建非接触式液位测量实验系统,以光源反射和光源同步跟踪为基本原理,利用激光三角测量法和CMOS成像技术,结合准确的图像处理算法来获得液位。
1 液位测量系统组成①
以计算机、CMOS图像传感器、激光发射器及密闭实验罐体等构成液位测量系统。图像传感器采用沃乐网络摄像头,焦距f=4.8mm,成像分辨率640×480,采用USB2.0接口,即插即用。采用微功率可聚焦激光源,波长为650nm,功率不高于5mW(可避免存在的安全隐患)。罐体采用储水罐,外接有刻度的连通器。
2 液位测量原理
笔者构建多光源线段液位测量系统模型,实验装置安装示意图如图1所示。

图1 液位测量实验装置安装示意图
设罐体高度为H,基准线距罐底高度为L1,液位面与基准线(用于基本标定点)间距为h。图像传感器和可聚焦激光灯分别以固定夹角λ和φ安装在罐体顶部两侧。激光三角液位测量原理如图2所示。

图2 激光三角液位测量原理
如图2所示,由聚焦激光源发射激光,在液位面形成点N,并通过图像传感器接收。假设光路穿过液位的延长线与罐底交于P点,与图像传感器透镜距离设为PQ,N垂直于PQ,交点为M。由图像传感器与罐体水平面夹角为λ,激光源与水平面夹角为φ,故∠NPQ=λ-φ。假设NM投影到成像平面上偏离原点为d1,则根据成像原理可知:
(1)
式(1)中f为焦距,点N、M之间的距离d为:
d=[(h+L1)cscφ]sin(λ-φ)
(2)
传感器透镜与交点M间距离为MQ=S:
S=Hcsc(180°-λ)-dcot(λ-φ)
(3)
由式(1)~(3)可知:
(4)
为了方便标定实验装置参数,定义A=hsinφsec(λ-φ)cscλ,B=ftan(λ-φ),因此式(4)可简化为:
(5)
定义C=A-λ,D=Bλ,则式(5)可变形为hB-Cd1+D=-hd1。
在标定实验初始参数时需要在不同液位采集n个数据,即:h=h1,h2,…,hn,由此可得其在成像平面上的偏移量相应为:d=d1,d2,…,dn,因此:
MX=P
(6)
其中:
(7)
(8)

(9)

3 实验装置
该实验所采用的圆柱形储罐规格为:高60cm,顶部直径24cm,底部直径30cm。储罐壁外侧设有连通器可直接读取初始液位。安装模型如图1所示,假定初始测量液面高度为30cm,每升高0.5cm采集一张液面图像,实验一共采集20组数据。利用前10组做标定,其余10组数据验证本测量系统的精度。
3.1 液位面激光斑点中心提取
液位面激光斑点中心提取时,需要考虑:
a. 改变阈值对图像进行二值化。由于罐体内部光线较暗,在图像成像平面上可能存在液面反射和灰尘引起的漫反射干扰点。针对该问题需要对图像进行灰度直方图统计,通过改变阈值可有效减少干扰点,二值化后进行中心提取。
b. 对目标图像中值滤波降低噪声。由于图像边沿在光线反射等所形成的椒盐噪声和斑点噪声,故通过中值滤波可以使斑点外部轮廓不规则减弱。采用传统的3×3模板中值滤波可满足实验条件。
c. 激光斑形心提取。由于激光源采用可聚焦,降低了其在液位面交点的大小。基于激光束在液面的交点呈椭圆状,Gonzalez R C等提出从数理统计学的角度分析,并假设探测器噪声为泊松分布情况下,光斑图像的位置估值性能及其与光斑尺寸之间具有函数关系[5,6]。此外,冀芳提出了基于概率的圆拟合区域划分算法来检测类似圆的形心[7]。笔者综合两种结论,并结合本测量系统的实际情况,给出了一种光斑位置的估算方法,即对光斑提取边缘,得出光斑的边缘尺寸大小对由边缘构成的相对规则形状后提取形心。
3.2 系统标定结果和实验结果
利用采集前10组数据标定实验参数后,将所标定的数据与液位下降时的后10组数据进行比较,验证实验系统的准确性。连通器读数代表参考液位,P(I,j)代表激光斑点在摄像机成像平面上的形心坐标。连通器读数和液位实际高度见表1。
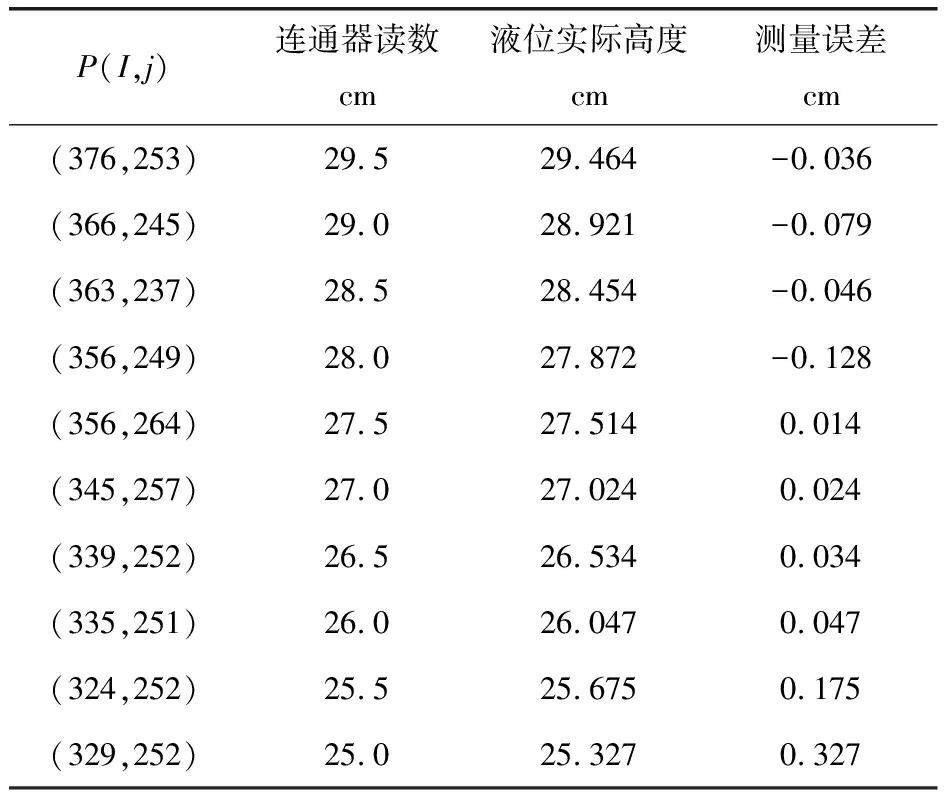
表1 连通器读数和液位实际高度
从表1中数据可知,该测量方法与实际液位有一定偏差,根据标准差计算公式可知所测液位的标准差S=0.1076。
4 结束语
笔者提出了一种新颖的基于图像处理技术的密闭式罐体非接触式液位测量方法。通过激光和图像处理技术,提高了测量精度,并利用实验平台验证技术方案的可靠性,该测量方法具有安全、精确及高效等优点,符合实际工程应用要求。由于实验装置安装固定,可避免较为繁琐的参数校正。此外,若利用高分辨率图像传感器可更进一步提高精确度。
