大截面矩形隧道掘进机新型后推进系统的设计与应用
2014-08-01沈培坚
沈培坚
(上海市机械施工集团有限公司,上海 2 00072)
0 引言
众所周知,矩形断面隧道比圆形断面隧道更能充分利用结构断面,合理的形状分布能减少土地征用量和地下掘进面积,有利于降低工程总体造价[1],被广泛应用于城市的地下人行通道、综合管廊等市政隧道工程中。在矩形隧道建造中,大都采用矩形隧道掘进机成套设备,其中的后推进系统是掘进机在施工中推进的关键设备[2]。掘进机通过后推进系统中的液压油缸顶伸来产生向前掘进的动力。由于各种形式的小口径掘进机本体受后顶作用力面积较小,所用推进液压油缸数量少,较易控制。而大截面(6 m×4 m以上)矩形隧道掘进机(以下简称掘进机)不同于其他形式的小口径掘进机,因其大截面、大宽度矩形的特点,使掘进机在初始以及在以后的各个掘进阶段会受到各个方向的作用力,特别是受后推进左右两边的顶力影响比较大,通常容易形成水平方向的左右偏差,控制比较困难。
上海陆家嘴中心区域地下空间项目工程,分别建造4条(6 m×4 m)地下矩形通道来连接上海中心、国金中心、金融大厦、环球大厦和地下空间区域等地下部分,形成一个共同的地下空间。由于项目四周都是高楼大厦,地面道路均是主干道,地质情况复杂,始发井设置与施工难度较高。工程需要采用不设接收井在封闭空间内掘进机进洞,以及在狭小始发井内采用掘进机斜向出洞等用于特殊环境下的矩形隧道建造技术。这种工况不仅增加了掘进机作业的难度,也加大了后推进系统左右两边偏差控制的难度,如果后推进系统不能起到有效的控制作用,将会引起掘进机推进轴线发生偏差,影响掘进机的准确进洞。所以,在施工措施中,后推进系统对于确保工程的实施将起到关键性的作用。
近年来,国内外已有许多关于矩形隧道掘进机的施工、进洞、风险分析及应对措施的相应研究成果。文献[3]介绍了3.3 m ×2.5 m 矩形顶管机顶推力对施工的影响;文献[4]研究了矩形顶管斜向出洞的设计、施工要点;文献[5]通过对大断面矩形顶管始发常见风险进行分析,做出了防止栽头和扭转姿态的应对措施;文献[6]叙述了顶管掘进机液压油缸同步伸缩控制技术;文献[7]探讨了变频驱动技术在电机控制中的应用。以上相关文献在论述后推进系统对控制掘进机斜向出洞的左右偏差控制的作用与重要性方面比较少,叙述后推进系统液压油缸同步伸缩控制相对于斜向出洞的施工需求针对性不够,对变频电机直接应用于后推进系统液压控制未作详尽描述。传统的后推进系统存在的问题是:液压油缸整体同步伸缩控制方式在应对斜向出洞左右顶推力差异较大的工况时,左右偏差控制比较困难;在操作上设立单独控制台,与掘进机主机分开工作,使施工作业不协调;在控制上采用单片机作为控制主机,抗干扰性差,故障率高,不易调试与扩展;在液压系统方面,传统控制响应速度较慢,影响纠偏效率,且结构复杂、故障较多等。为此,本文以上海陆家嘴中心区地下空间开发项目为背景,着重开展对掘进机新型后推进系统创新设计,来有效地解决上述存在的难题。研究的技术创新措施包括:采用液压油缸左右侧分别同步伸缩控制技术,将能充分克服掘进机斜向出洞时左右顶推力差异较大的难题;设计把后推进系统操作与控制功能融入掘进机主控系统的方案,省去单独控制台,使操控协调、直观简便;用PLC替代单片机控制来为施工轴线纠偏提供保障,降低系统故障率,更便于调试与升级;将采用变频电机直接控制液压定量泵技术,能保证偏差控制可靠、响应快速,既节能又优化液压系统结构。本文还将对新型后推进系统的监控系统和实际施工操作进行详尽论述。
1 系统构架
掘进机新型后推进系统的总体构架设计涵盖了控制系统、操作系统、液压系统和监控系统等。系统结构示意如图1所示。
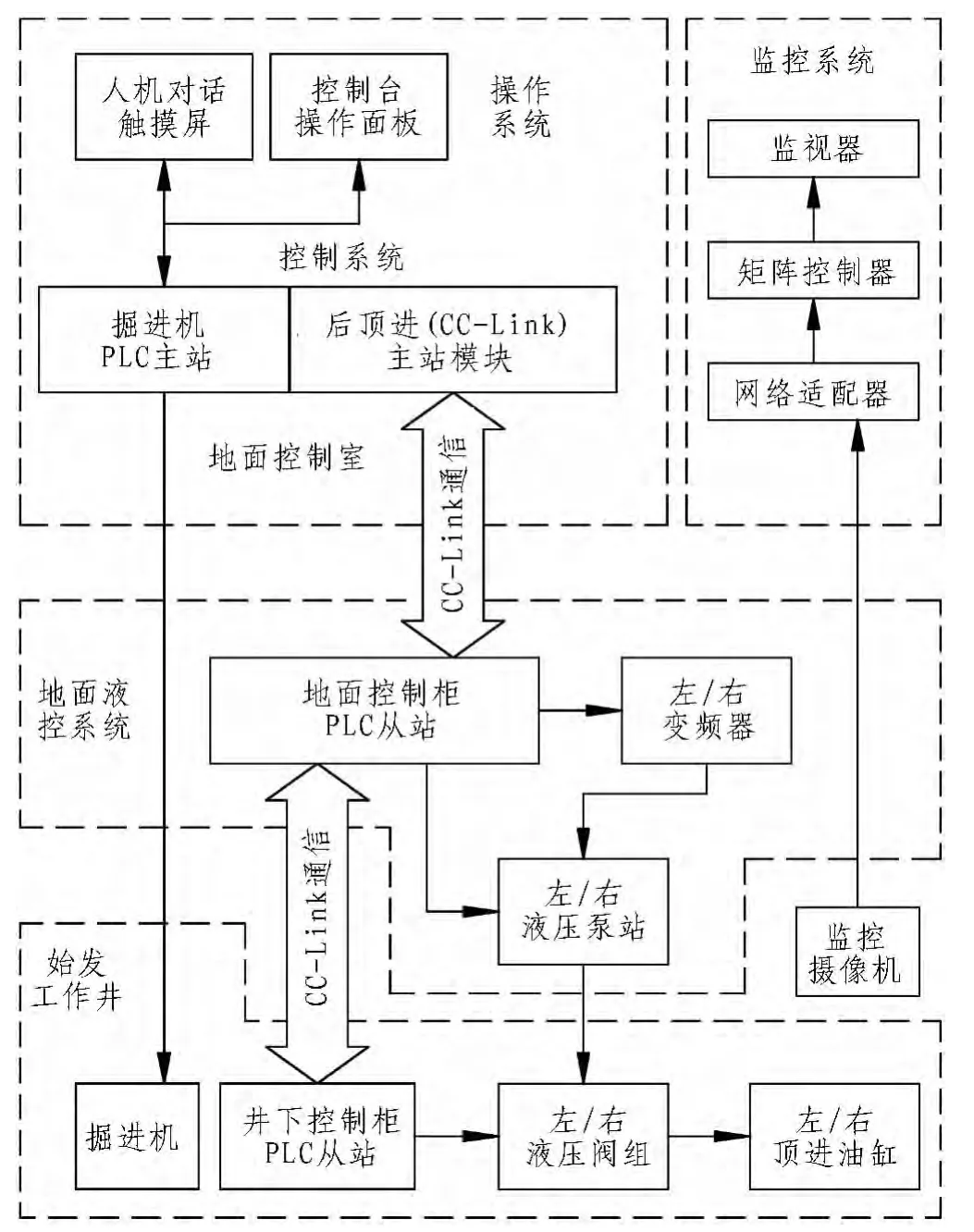
图1 系统结构示意图Fig.1 Structure of rear propulsion system
2 系统工作原理
系统后推进油缸组设计为左右两侧分别同步控制形式,使两边油缸能各自分别灵活作业。采用计算机PLC控制技术,可在控制室确定手动或自动模式工作,在人机对话触摸屏、操作面板上发出控制指令,PLC主站将信息通过CC-Link网络传递到各个 CC-Link子站。由地面控制柜CC-Link子站来控制左右2台变频器驱动液压系统泵站工作,使左右两侧后推进油缸伸出带动顶铁、混凝土管段向前推进掘进机,并通过左右两侧井下控制柜的CC-Link子站来控制左右两侧后推进油缸的液压阀组。系统各类传感器通过对水平方向左右两侧后推进油缸的伸出行程、速度和压力检测,以及全站仪的推进轴线测量,经过综合分析、运算处理来解决左右两侧后推进油缸的行程偏差控制问题,同时对两侧后推进油缸推进压力与速度进行作业同步控制,保持压力均衡,以实现施工轴线处于有效控制范围内的目的。系统控制原理如图2所示。
3 系统技术方案
3.1 控制系统
3.1.1 结构
地面控制部分,由控制室、掘进机主站PLC(三菱A2US1)、后推进 CC-Link网络主站模块(三菱A1SJ61BT11)、地面控制柜和 CC-Link子站(三菱AJ65SBTB1-32DT、AJ65SBT-64AD、AJ65SBT-62DA)、2套驱动变频器(富士变频器FRN30G11S-4、电抗器DCR4-30)和CC-Link通信电缆等组成,形成地面控制构架。PLC主站与CC-Link主站通信模块见图3。地面控制柜、CC-Link子站和变频器见图4。AJ65SBT-64AD、AJ65SBTB1-16T 型)、激 光 距离(Baumer:OADM 12型)和压力传感器(PT124B-210型),包括CC-Link通信电缆等组成,形成井下控制构架。井下控制柜、液压阀组和CC-Link子站见图5。
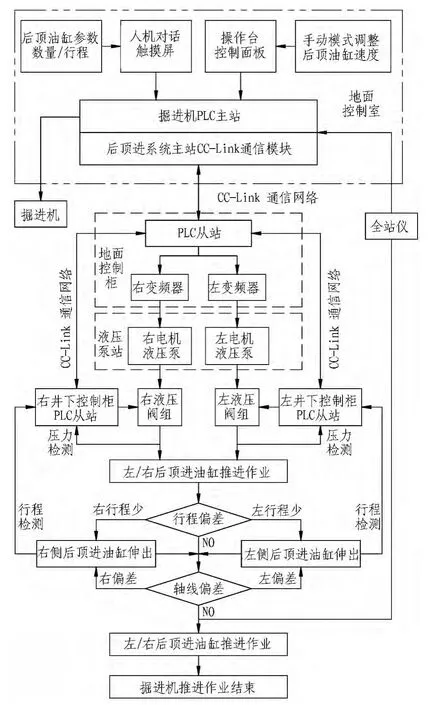
图2 系统控制原理示意图Fig.2 Control principle of rear propulsion system

图3 PLC主站与CC-Link主站通信模块Fig.3 Communication module of PLC master station and CC-Link master station
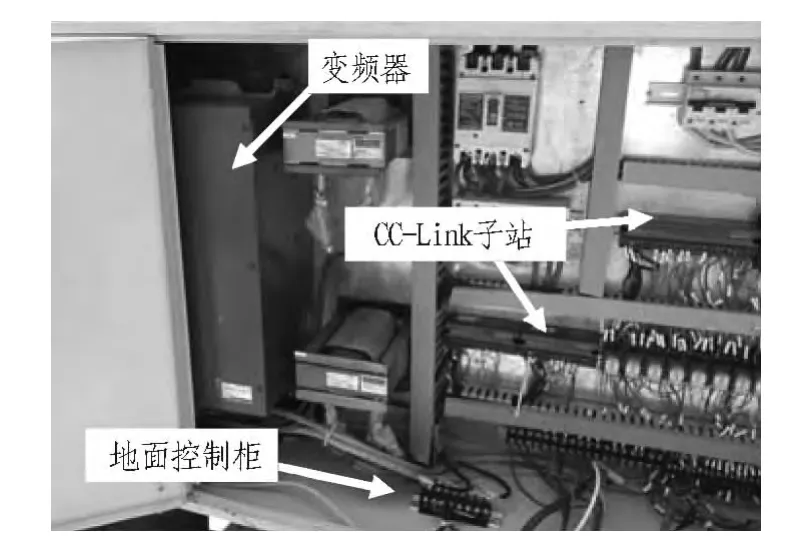
图4 地面控制柜、CC-Link子站和变频器Fig.4 Ground surface control cabin,CC-Link subsite and inverter

图5 井下控制柜、液压阀组和CC-Link子站Fig.5 Underground control cabin,hydraulic valve group and CC-Link subsite
3.1.2 原理与特点
控制系统是后推进系统的大脑与神经,故设计了采用PLC可编程控制器来作为整套控制系统的核心。PLC具有系统功能强、可靠性高等一系列优点,解决了传统单片机控制存在抗干扰能力差、故障率高、不易调试与扩展等问题。系统由掘进机PLC主站组合后推进专用CC-Link网络主站模块构成工作主站,二级网络采用CC-Link形式,是一个可同时进行控制和信息传递的高速现场总线[8]。与地面、井下的控制柜中的CC-Link子站构成局域网控制。由主站对各个子站进行作业指令的发送、数据传输采集和运算处理。
系统创新地借用了掘进机PLC主站(传统方法都是分别设控制系统),在主站机架上插入用于后推进控制的CC-Link主站模块,将后推进控制功能融入掘进机的控制系统,使2套系统合二为一,节省了1套后推进控制PLC硬件系统(见图3)。
系统通过优化设计,使结构合理、功能齐全、控制安全可靠,实现了后推进系统与掘进机主机共同远程控制和操纵。具有报警和连锁功能,能对各电机和控制回路进行必要的保护,配合触摸屏实时显示系统的工作状态及故障状态[9],发挥监控和信号指示等作用。
3.2 操作系统
3.2.1 结构
系统由操作台、操作面板、2台光洋GC-56LC型10″彩显触摸屏、通信电缆与地面控制柜操作面板等组成,形成操作构架。由于将后推进控制功能结合进掘进机的主控系统,所以传统的后推进单独操作台就省略了,技术优势明显。传统后推进系统独立操作台与现操作台如图6所示。

图6 传统后推进系统独立操作台与现操作台Fig.6 Conventional independent console Vs current console
3.2.2 原理
在作业前,可在触摸屏上设置控制模式(手动或自动、联机或脱机),选择所需要工作的后掘进机油缸,在操作面板上启动左右泵站工作。操作界面示意如图6所示。
在推进时,可确定手动、联机模式工作,由操作人员根据工作轴线的偏差、后推进油缸的行程差和压力值,在操作面板上进行左右两侧后推进油缸推进速度的手动调节,联机模式使掘进机与后推进系统有相关逻辑连锁关系。在自动模式工作时,则由系统根据设定的初始速度自动推进,同时根据采集的掘进数据,自动进行推进控制。
在管段安装时,需采用手动、脱机模式工作,即掘进机与后推进系统解除连锁关系,由后推进系统单独进行相关安装及辅助工作。
地面控制柜操作面板有手动与自动2种操作模式。本地模式时,主要是用于液压泵、变频器安装后的调试以及故障检修和维护时的手动操作。地面控制柜操作面板如图7所示。远程模式时,则由PLC进行远程控制。
3.3 液压系统
3.3.1 结构
系统把液压泵站安置在地面始发井边,把16个液压油缸分成2组安装在导轨上,每组各8个。油缸为等推力油缸,行程2 500 mm,推力2 000 kN。系统由液压油缸组、液压泵站(油箱、油压表、油位表,30 kW工作电机、定量泵与电磁阀组等)和压力传感器、液压管路,以及安装在后推进油缸组边上的油缸液压控制电磁阀等构成。后推进油缸和液压泵站如图8所示。
创新地把系统左右两侧液压油缸组的驱动液压系统各自分开独立设计,在液压结构上予以彻底分开,可充分应对左右两侧顶推力差异较大的工况,排除了相互间的控制干扰。系统采用2套液压泵、电磁阀、电机、变频器和井下液压阀组,实施分别同步驱动控制。其液压原理如图9所示。
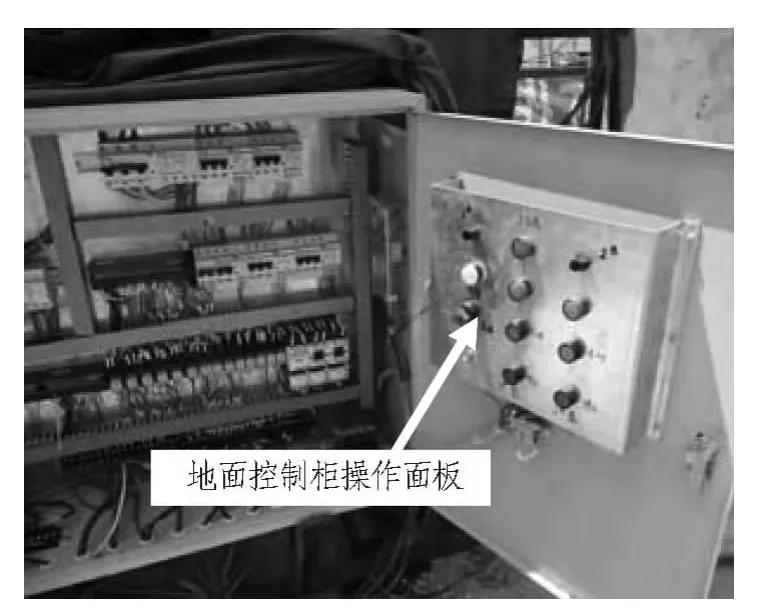
图7 地面控制柜操作面板Fig.7 Operation panel of control cabin at ground surface
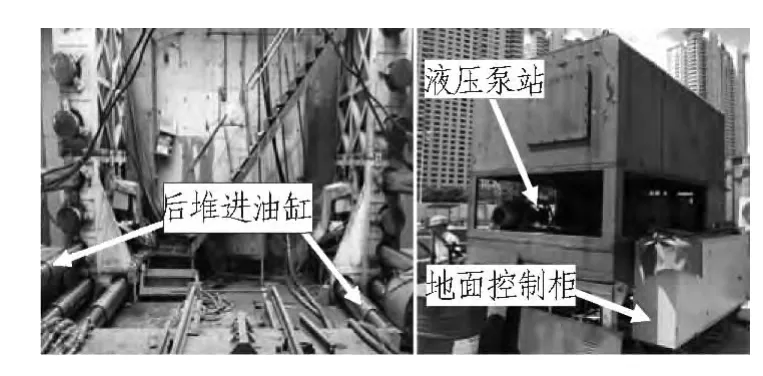
图8 后推进油缸和液压泵站Fig.8 Hydraulic cylinders and hydraulic pump station of rear propulsion system

图9 液压原理图Fig.9 Principle of hydraulic system
3.3.2 原理与特点
系统工作时,由地面控制柜中的2台变频器驱动液压泵站中的工作电机与液压定量泵,通过改变2台变频器的输出频率,来分别对2台液压定量泵的转速进行控制,进而达到对2路液压输出流量的控制,使左右两侧的后推进油缸组的推进速度分别得到有效的控制。同时由2台井下控制柜通过液压控制阀组对左右两侧后推进油缸组进行伸缩数量的控制。实现了后推进油缸组左右两侧分别同步推进的控制,解决了传统系统只能整体同步控制而无法有效应对左右推力差异较大的难题,具有较大的技术创新优势。
系统采用独特的变频器直接控制电机驱动液压定量泵的技术,使系统控制极为可靠、伸缩响应迅速,效果好,还省去了价格昂贵的液压变量泵、比例阀和比例放大器。传统液压泵站的设计,都将液压控制阀组安装在站内,每根油缸需要2根工作油管,共需要16根工作油管从地面传输到井下。而本系统采用了CC-Link控制模式,液压控制阀组可从泵站内转移到左右两侧后推进油缸组边,由井下控制柜通过CC-Link子站直接进行控制,这样地面的液压泵站只要通过4根液压管路(二侧各1根进油管和回油管)即可抵达井下的液压控制阀组,使整个液压系统结构简单合理,既便于安装和调试,又节约了大量的材料与费用,具有节能降耗的优点。传统液压构件与现液压构件的对比如图10所示。
3.4 监控系统
系统配备4路摄像机,1台大屏幕彩色显示器,1台视频矩阵切换器,1套网络适配器。系统具有井下后推进油缸组、掘进机、井上和场地图像传输与共同显示功能,显示画面可进行相互切换,保证对施工的作业场面监控。特别是在后推进油缸组两侧设置了网络摄像机,不但能使控制室进行实时监控,还能借助网络向指挥中心传送图像信号[10]。显示器、视频矩阵切换器和网络适配器如图11所示。
系统观察范围较大,可满足整个施工区域的监控,并且可适应各种复杂的环境条件。
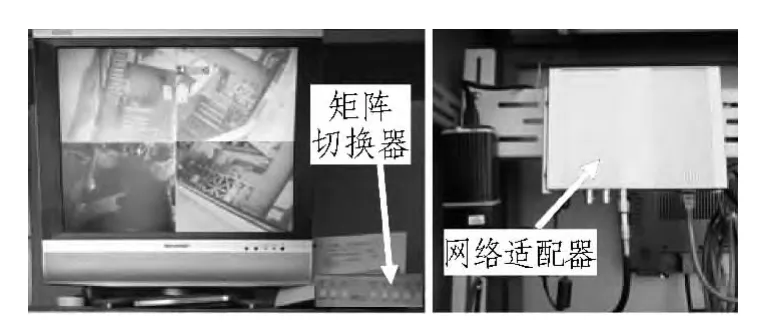
图11 显示器、视频矩阵切换器和网络适配器Fig.11 Monitor,video matrix switcher and network adapter
4 实际施工操作
4.1 工程现场
始发井位于上海环球金融中心大厦边,掘进机向上海中心大厦方向斜向推进。后推进系统的施工布置结构如图12所示。
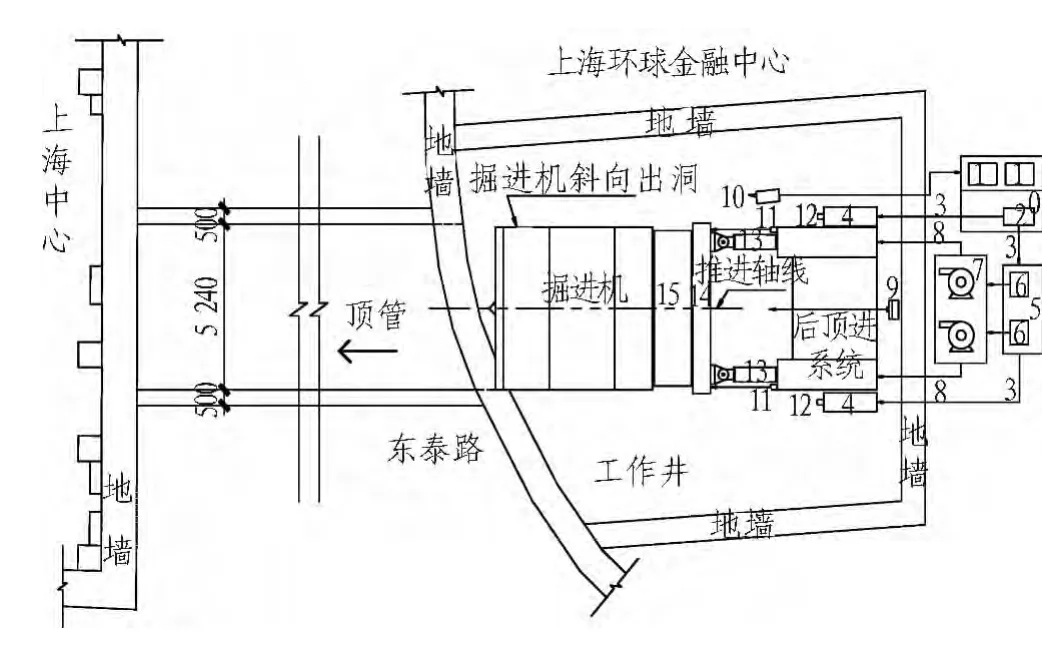
图12 施工布置结构示意图Fig.12 Layout of construction devices
4.2 后推进操作
系统在实际施工中,根据矩形隧道掘进的施工工艺,以及测量的掘进机工作轴线与左右两侧后推进油缸行程监测数据,结合掘进机控制界面、后推进装置操作触摸屏、操作面板和监控系统进行综合操纵控制。操作人员通过控制界面和操作台控制开关,进行作业数据输入,实施顶进、出洞、进洞、混凝土管节安装等施工。
4.2.1 控制界面
后推进操作的控制界面由泵站启动和作业操作这2个触摸屏界面构成。本设计开发了系统专用人机对话控制界面,比传统的机械式按钮操作方式提升了技术层次,使操作更加直观、方便,提高了作业效率和可靠性,降低了故障率。
4.2.2 主要控制操纵
1)推进准备。首先要按照施工作业指令,设定推进工作轴线参数,启动水泵、油冷却泵和风机工作,选择左右两侧需工作的后顶油缸的数量与位置,确定操作模式。
2)推进作业。在初始掘进时应采用手动操作模式工作。操作人员根据左右两侧后推进油缸行程偏差,手动调节后推进油缸的左右顶进速度。同时,要求顶进管段自始至终都要在测量工作的严格控制下进行[11],保持全站仪全程对轴线偏差的测量。要时刻观察后推进系统的液压推力、掘进机的推进工况、土压平衡变化状态,并通过视频监控系统察看后推进油缸实际的伸缩情况,合理地控制后推进油缸的推进速度与推力。
在自动操作模式工作时,需设定顶进初始速度,然后进行油缸的作业加载。系统将根据左右两侧后推进油缸行程偏差和轴线偏差,来自动调节后推进油缸的左右顶进速度。当PLC主站检测到掘进机的推进方向往左偏离轴线时,PLC便自动向左侧后推进油缸组的液压驱动变频器发出加大推进频率的输出指令,同时向右边后推进油缸的液压驱动变频器发出减小推进频率的输出指令。对左右两侧后推进油缸伸缩的速度与行程偏差进行同步修正,使掘进机本体逐渐向右靠近设计轴线,回归到正确的前进方向上。反之,则相反处理。同时,将根据土压平衡、液压推力和油箱温度等情况,自动作出速度的调整或停止作业等措施,使推进达到最佳的施工控制状况。
4.2.3 推进流程
在缩回全部后推进油缸后,将第1节管段吊下工作井,安装在掘进机后面,后推进油缸伸出开始顶进。当后推进油缸达到最大行程后,本节管段顶进结束。操作台手动操纵后推进油缸全速缩回,再吊入第2节管段,接着继续顶进。如此循环,直至顶完全程[12],把所有混凝土管段全部顶入矩形隧道完成施工。
4.2.4 实施效果
本系统于2013年7月和10月在上海浦东陆家嘴中心区,应用于连接上海中心和环球金融大厦之间,以及上海中心与地下空间区域的地下矩形通道斜向出洞的掘进施工中,取得了成功。系统还将继续运用于连接上海浦东陆家嘴中心区各个大厦之间的地下矩形通道掘进施工。
5 结论与探讨
1)大截面矩形隧道掘进机新型后推进系统是地下矩形隧道施工的核心设备之一,对于确保工程的顺利实施起到了关键性的作用。
2)在上海浦东陆家嘴中心区地下矩形通道工程中,针对采用掘进机斜向出洞的施工工艺特点,以及掘进机在掘进阶段受到左右方向作用力影响较大的特征,研制了适用于该施工工艺与相关工艺的后推进系统,对系统进行了技术创新设计,具有较强的实用性与可操纵性,在施工中得到了很好的实践应用。
3)本文研究的各项创新举措,与传统的研究相比,具有较大技术优势,充分体现出系统的先进性、实用性和可靠性。
4)本文的研究对类似工程和大截面矩形隧道掘进机的施工技术实践有着积极的推进和借鉴作用,并且同样适用于大直径圆形掘进机的施工作业。
5)目前系统推进液压油缸(同组)只能同时做伸或缩的操作,尚存在无法使同组油缸既有在做伸的动作,同时又有其他油缸在做缩动作的难题,影响了施工效率的提高;系统的控制方式还不够丰富;系统抗干扰性能力还不太强;研制成本偏高。这些问题都有待于进一步研究、讨论和解决。
[1]孙继辉.大断面矩形地下通道掘进施工设备与技术的研究[J].建筑施工,2007,29(4):225-229.(SUN Jihui.Study on tunneling construction equipment and technology for large section and rectangular underground passageway[J].Building Construction,2007,29(4):225-229.(in Chinese))
[2]葛金科,沈水龙,许烨霜.现代顶管施工技术及工程实例[M].北京:中国建筑工业出版社,2009.
[3]Fumihiko Matsumoto.矩形顶管机在长距离及弯曲顶管施工中的应用[J].非开挖技术,2011,6(3):19-24.
[4]黄斌.矩形顶管斜向出洞设计施工要点分析[J].建筑结构,2013(S2):126-128.(HUANG Bin.Annlysis on key design and construction points of rectangular pipe jacking oblique cave[J].Building Structure,2013(S2):126-128.(in Chinese))
[5]米晋生,肖正茂,黄威然.大断面矩形顶管始发的常见风险分析及应对措施[J].世界轨道交通,2012(7):52-53.
[6]贾朝阳.顶管掘进机液压油缸同步控制系统设计[J].煤矿机电,2007(5):31-33.(JⅠA Chaoyang.Design of synchronizing control system for hydraulic jack of pipejacking machine[J].Colliery Mechanical & Electrical Technology,2007(5):31-33.(in Chinese))
[7]王钰钢.浅谈变频器对变频电机的驱动[J].科技创新与应用,2013(23):132-133.
[8]刘羡伦,郭京波.分布式网络控制系统在盾构机上的应用[J].隧道建设,2011,31(S1):421-424.(LⅠU Xianlun,GUO Jingbo.Application of distributed network control system used in shield machine[J].Tunnel Construction,2011,31(S1):421-424.(in Chinese))
[9]孙多辉.可编程控制器PLC在矿用掘进机电气系统中的应用[J].数字技术与应用,2012(2):181.
[10]崔晓强.基于视频监控的施工现场信息化管理研究[J].建 筑 施 工,2013,35(2):148-150.(CUⅠXiaoqiang.Study on construction site information management based on video monitoring[J].Building Construction,2013,35(2):148-150.(in Chinese))
[11]韩选江.大型地下顶管机施工技术原理及应用[M].北京:中国建筑工业出版社,2008.
[12]葛春辉.顶管工程设计与施工[M].北京:中国建筑工业出版社,2012.
