舰船消磁设备软件功能改进设计*
2014-07-25徐杰
徐 杰
(海军驻桂林地区军事代表室 桂林 541002)
舰船消磁设备软件功能改进设计*
徐 杰
(海军驻桂林地区军事代表室 桂林 541002)
在以往舰船消磁设备软件功能基础上,论文新增电源模块数量增加或减少时的均流计算、三相电源和电源模块异常情况的报警与处理等功能,大幅改进消磁设备的软件功能,实现了消磁设备的高度智能化。
消磁设备; 软件功能; 改进设计
ClassNumberTP391
1 引言
某新型消磁设备,属于研制的最新一代智能型消磁设备[1~2]。在以往舰船消磁设备软件功能的基础上,本文新增电源模块数量增加或减少时的均流计算、三相电源和电源模块异常情况的报警与处理、三相电源和负载电流传感器电压传感器的状态自检等功能,大幅改进消磁设备的软件功能,实现了消磁设备的高度智能化[3~4]。
2 硬件框图及功能说明
消磁设备硬件框图如图1所示,整个监控模块中,一共采用四块ARM嵌入式系统(LPC1768芯片)进行数据处理,其中主用(ARM1)、备用(ARM2)监控模块各一个,用于接收处理CAN1发送的控制信息及返回消磁电源的状态信息,具有互相监控的功能;主备用切换开关(ARM3)用于判断主用(ARM1)、备用(ARM2)的状态,切换到工作正常的监控模块上;ARM4用于测量绕组电阻值和电感值以及接收以太网信号(预留接口),通过CAN总线与ARM1、ARM2连接[5~8]。
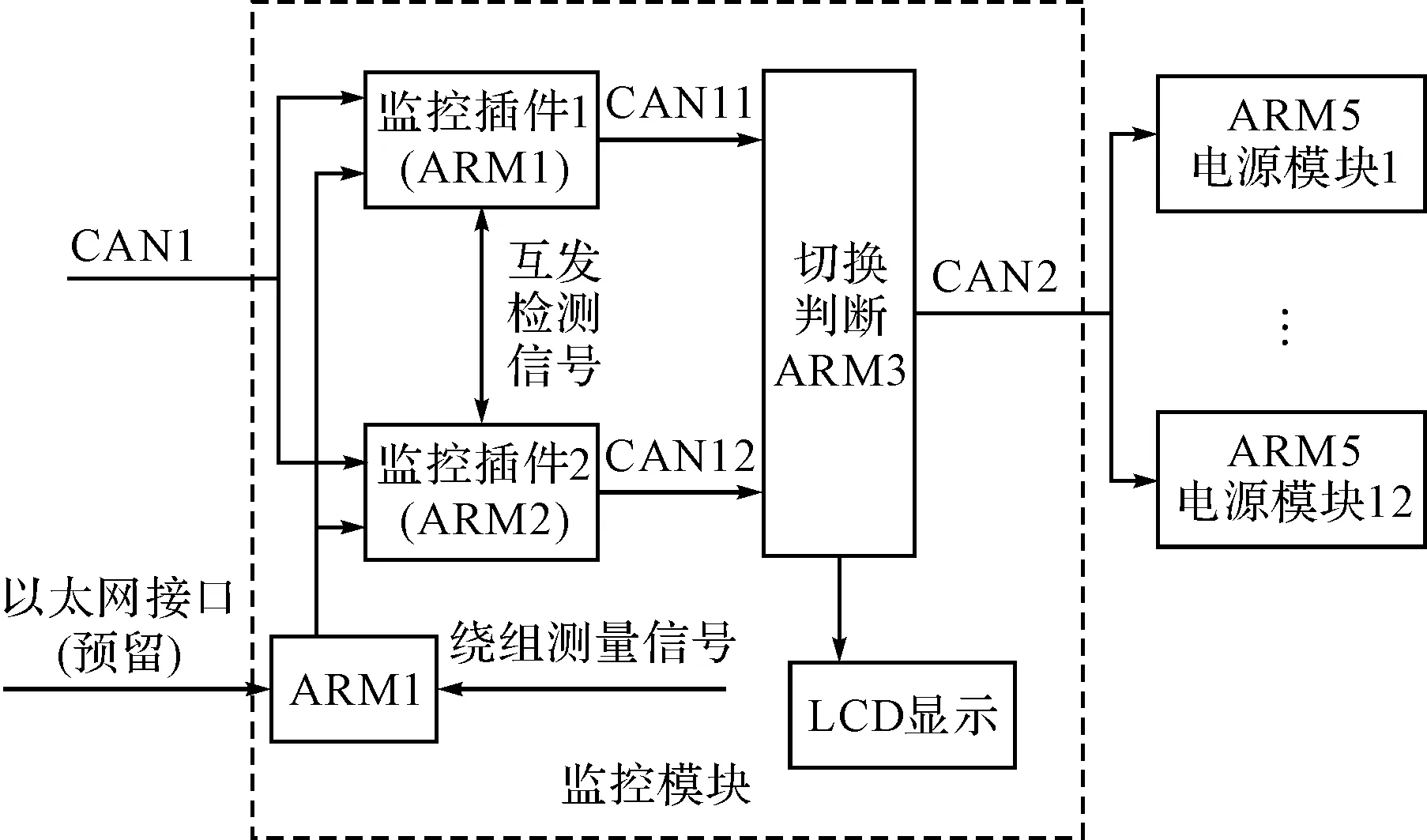
图1 硬件框图
四组12个电源模块中,每一个电源模块由ARM5接收CAN信号控制信号,通过D/A转换,输出模拟控制信号控制电源模块的电流,并返回电源模块状态信息。
3 监控模块软件设计说明
3.1 ARM1、ARM2功能说明
1)输入电源检测功能
主用监控模块与备用监控插件完成自检后,对四路三相输入电源状态进行检测,根据四路三相输入电源状态检测电路的信号变化,对四路三相输入电源进行缺相、欠压、过压的判断,并进行相应处理,具体方法如下:
当A相断,A11是1.6V,B11是3V;
当B相断,A11是3V,B11是1.6V;
当C相断,A11是1.6V,B11是1.6V;
欠压时,A11输出低于2.7V,B11输出低于2.7V;
过压时,A11输出高于3.18V,B11输出高于3.18V。
发生过压、欠压故障时,控制继电器断开该路电源模块供电电路。
缺相时,对控制仪发来的控制信号进行处理(低于额定控制信号的0.7倍时,直接输出,高于额定控制信号的0.7倍时按额定控制信号0.7倍输出),处理后,通过CAN总线送出。
2)输出电流均流计算功能
把电流数值除以电源模块数M,得到每个电源模块控制信号,再以CAN总线方式发送给电源模块。
在实现电源模块数增加或减少(出现故障)情况下,通过判断具体情况分别按以下方式处理。
(1)当电源模块数量增加时,监控系统首先根据增加模块的插槽号,将原有M个模块编为一组,新增加模块为一组。原来模块的控制量逐渐减小,增加的第M+1模块,其控制量从0逐渐增加,最后达到平均分配,实现M+1总分配。根据原电源模块标识地址与新增加电源模块地址不同,把不同命令值,通过CAN2总线,分别传送给M+1个电源模块。
(2)当电源模块出现故障时,须重新配置(均分)电源模块的控制信号。如一组M个电源模块中某个电源模块出现故障,电源模块数从M减小到M-1,控制量从总量的1/M逐渐增加到1/(M-1),通过CAN2总线,分别传送给该组中各个电源模块。
以上通过数字处理后,各电源模块通过CAN2总线接收命令,通过D/A转换为模拟信号,控制电流放大电路,实现大电流输出。
3)CAN1中断子程序
ARM1、ARM2都包含了CAN1中断子程序。
(1)以最高优先级处理CAN发送的命令信号,根据协议,提取:电流值、启动信号、停止信号。对电流信号均流处理后,分别以CAN11和CAN12送出。
(2)均流处理中,根据先运行的电源模块数量,中断子程序及时调整均流方案,在电源模块数量发生变化后,保证均流后信号的软切换(无跳变切换)。具体程序流程图如图2所示。
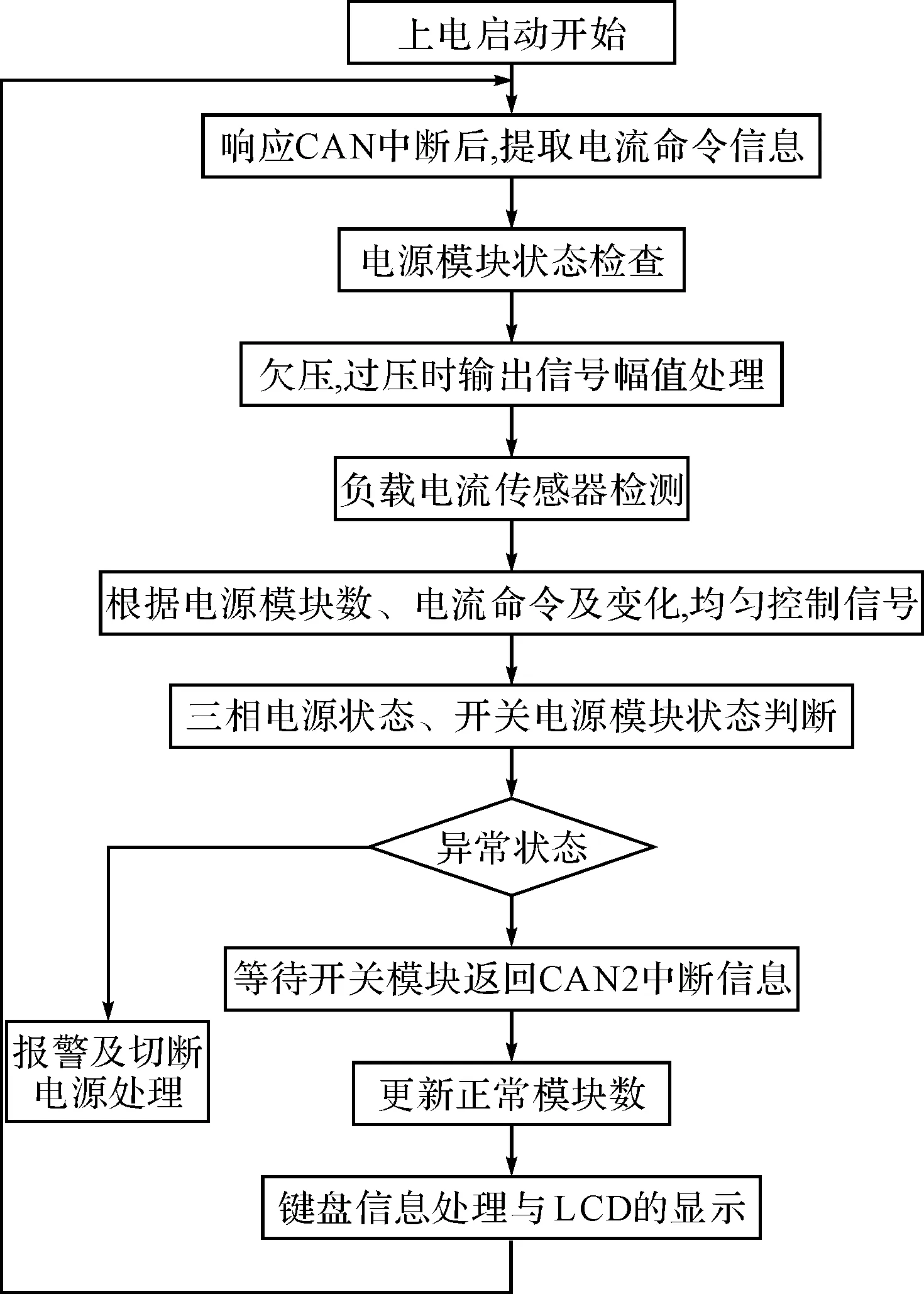
图2 CAN1中断子程序
4)其它功能
(1)可通过键盘及LCD显示屏进行操作,设置过压、欠压报警门限、每路电源模块数量及更改密码。
(2)手动、自动运行的切换,手动运行时,可设置输出电流值。
(3)主监控与备用监控是同时并行工作,在每个程序循环中,主监控与备用监控各自发给对方确认信号,表示自己正常循环工作。
(4)根据接收到的对方确认信号,判断对方工作是否正常,置复相应的标志位。
具体程序流程图如图3所示。
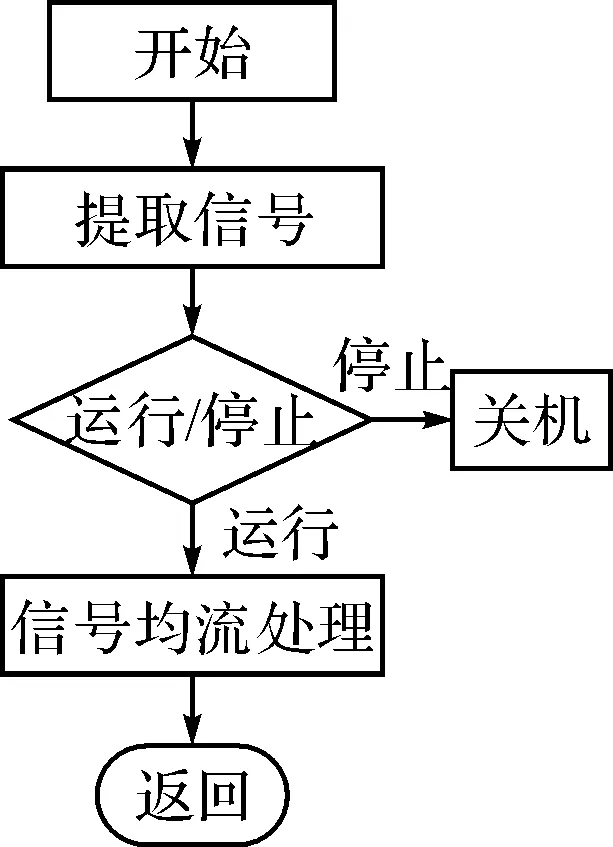
图3 ARM1、ARM2主程序
3.2 ARM3切换功能说明
1)以CAN2总线形式,监控模块与各电源模块交流数据和传递电流控制命令,把电源模块状态信息上传给监控系统,以便监控模块对故障进行处理。
2)各电源模块(12个)按照插入控制柜中位置对应地址标识,接收监控系统发来的对应数据。
3)各个电源模块将状态信息和电源的位置(ID地址)一起上传给监控模块。
4)ARM3根据两个监控模块的运行状态,对主监控模块ARM1和备监控模块ARM2分别输出的CAN11和CAN12数据的标志位进行判断切换。将均流处理后的数据通过CAN2发送给电源模块,并以较低优先级,从CAN2总线接收电源模块返回的状态信息。
上述过程由ARM3完成,ARM3对前端传送过来的信息进行识别、判断并提取正确信息发送给后端电源模块[9~10]。具体程序流程图如图4所示。
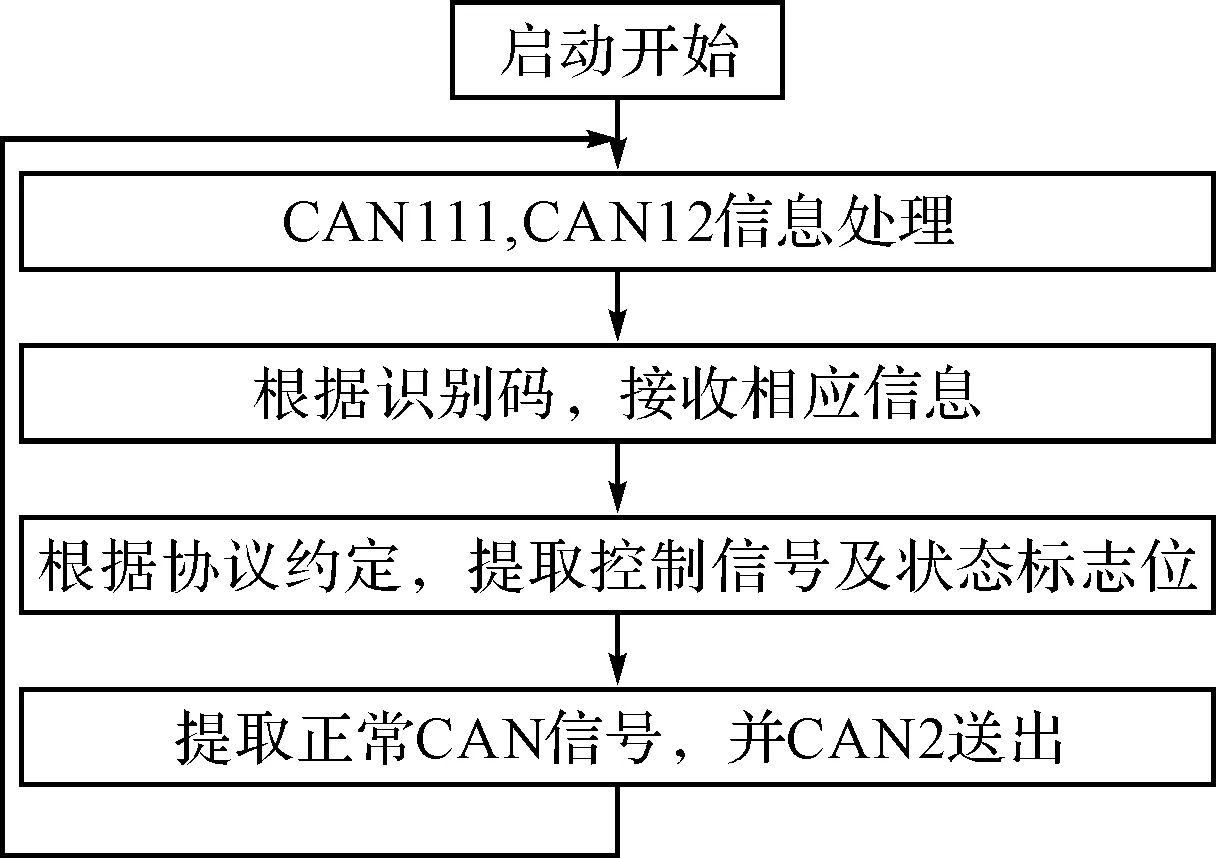
图4 ARM3主程序
此外,本设备中ARM4具有两个功能:测量绕组电阻及电感值及为以太网预留接口。
4 电源模块(ARM5)软件设计说明
1)主程序完成键盘的扫描,对该电源模块插入控制柜的插槽号和增益比例值进行记忆保存与修改处理,对输出电流和电压采样,对负载开路短路等进行分析。
2)从CAN2得到电流命令信号,处理后,通过D/A转换,得到模拟电流命令信号,控制电源模块的输出电流。
3)测量风扇口、散热器温度,并与设定值比较,如果温度过高,蜂鸣报警。
4)定时对输出电流进行采样,为电源模块和负载状态分析提供数据。
电源模块程序以及CAN2中断子程序流程图如图5所示。

图5 电源模块主程序
5 结语
在以往舰船消磁设备软件功能的基础上,国内研制的最新一代智能型消磁设备新增了电源模块数量增加或减少时的均流计算、三相电源和电源模块异常情况的报警与处理、三相电源和负载电流传感器电压传感器的状态自检等功能,大幅改进消磁设备的软件功能,实现了消磁设备的高度智能化。
[1]周耀忠,张国友.舰船磁场分析与计算[M].北京:国防工业出版社,2004:21-26.
[2]叶平贤,龚沈光.舰船物理场[M].北京:兵器工业出版社,1992:33-36.
[3]GJB 2786-96武器系统软件开发[S].
[4]GJB 5236-2004军用软件质量度量[S].
[5]郑宗汉.实时系统软件基础[M].北京:清华大学出版社,2002:35-60.
[6]李小群.进程间通信机制的分析与比较[J].计算机科学,2002,29(11):58-61.
[7]周之英.现代软件工程[M].北京:科学出版社,1999:17-19.
[8]姜启源.数学模型[M].北京:高等教育出版社,1993:31-35.
[9]樊昌信,张甫翎,徐炳祥,等.通信原理[M].北京:国防工业出版社,2001:14-15.
[10]胡培勤.Matlab在数字通信系统仿真中的应用[J].佛山科技技术学员学报,2007(7):24-26.
ImprovementDesignofSoftwareFeaturesofMarineDegaussingEquipment
XU Jie
(Navy Military Representative Office of Guilin, Guilin 541002)
Based on the past software features of marine degaussing equipments, this paper adds the average current calculation when power supply module increase or decrease, alarm and handling when three-phase sources and power supply module are unusual. It improves the software features of marine degaussing equipment significantly, and achieves the highly intelligent of degaussing equipment.
degaussing equipment, software features, improvement design
2013年10月28日,
:2013年12月1日
徐杰,男,硕士,工程师,研究方向:电磁环境及防护工程。
TP391DOI:10.3969/j.issn1672-9730.2014.04.049
