水下目标识别技术的发展分析*
2014-07-25宋波
宋 波
(海军驻大连426厂军事代表室 大连 116005)
水下目标识别技术的发展分析*
宋 波
(海军驻大连426厂军事代表室 大连 116005)
水下目标识别技术在现代战争中发挥着越来越重要的作用。文章介绍了国外水下目标识别技术的发展历程以及装备的研制、改进情况,指出了在现代战争中发展水下目标识别技术的优势和重要性,重点探讨了几种水下目标识别技术的性能及其特点,最后论述了水下目标识别技术的发展动向与分析。
水下目标识别; 发展分析
ClassNumberTN97
1 引言
水下目标识别技术在军事上可用于侦察、布雷、灭雷和援潜救生等;在民用领域,它可应用于数据收集、海底头探测、海底考察、管道铺设、水下设备的维护与维修等。鉴于水下机器人的诸多重要的应用领域,其视觉分辨能力又是其执行各种任务、获取水下信息的重要途径,所以对水下机器人的图像采集,水下目标的图像处理与识别就显得越来越重要,是水下机器人能够正常工作的不可或缺的技术保障[1]。
2 水下目标识别技术
目标识别技术是智能化设备不可缺少的必备能力,是实现工程设备智能化和军事装备智能化的关键技术,也是在新形势下外军普遍采用高新技术条件下能打胜仗的重要前提[2]。
2.1 技术难点
要准确对水下目标进行识别,需要考虑方方面面的因素,首先要对待识别目标所处的水下大环境有一个充分了解。为了保证图像蕴含足够多的信息量,需要有稳定均匀的光源照射,但是因为水对于光源具有很大的衰减特性,所以在水下采集图像不能像在空气中那么简单。即使是在纯水中,不含任何杂质,图像的衰减现象也是很严重的。试验表明水这种传输介质对于光的衰减程度是光波长的复函数,它是由吸收和散射这两个互不相关的过程引起的,因此可以用指数形式描述光在水中传输时的能量衰减规律。
单色平行光束的照度可以用指数方程来表示:
I=I0e-cl
(1)
式(1)中,l为传输路程,I0为某水层的光量,c为衰减系数。
光在水中的衰减可用水中胶体粒子对光的散射组成和水对光的吸收衰减来表示,这样可以把c分为两部分:
c=m+n
(2)
m为体积吸收系数,n为体积散射系数,当海水比较清澈时,可以得到m=0.4c,n=0.6c。
此外,在水的散射作用下,水对光的吸收还具有选择性,这就给水下图像的采集带来了很大困难,图像质量常常不足够稳定,常会产生图像多重阴影、噪点加多和对比度下降等不利于处理的效果,给后续的图像处理带来了一定的难度。
2.2 目标识别的流程
一般来说,目标识别是在对图像目标进行预处理之后,选取一定的特征量加以识别和分类,然后输出结果。流程图如图1所示。

图1 目标识别的流程框图
从流程图中可以看出,一个图像处理与模式识别系统一般可分为两个主要部分。第一部分主要是对获取的图像信息进行加工、整理、分析、归纳,以去除冗余信息,提炼出能反映事物本质的特征,当然,去除和保留什么信息与采用何种方法进行判决有直接关系;第二部分主要是针对所采用的识别方法对预处理后的图像信息进行特征选取,然后把得到的特征量输入到所设计好的识别系统中,按照约定的规则进行目标的归类。最后是输出的结果,当然,最后得到的结果的品质与前面各个处理阶段的工作密不可分,所以力求每个处理环节都能达到科学、合理、完善。
2.3 图像处理
图像处理过程的前期工作和必经的过程是图像的预处理,通常对一幅图像的预处理可以有很多种方式。选取什么样的方法进行处理,要因图像和用途的不同而有所不同。一般来说,处理一幅图像应该根据预想的结果和关注的信息部分来选择预处理方法,而且通常处理方法的选择往往是几种方法结合在一起的,或者有先后顺序的讲究。图像处理过程如图2所示。
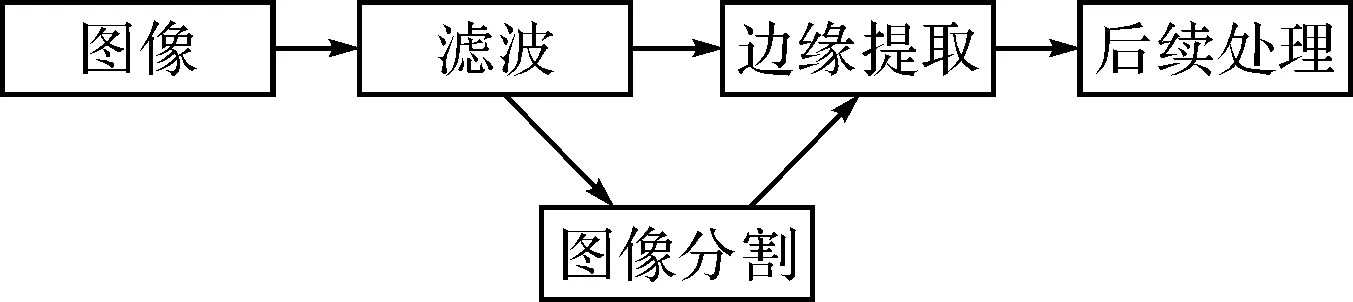
图2 图像处理流程
2.4 常见滤波方法
混淆在有用信号里的无用的会产生干扰的信号就是所谓的图像噪声,待处理的图像中一般都包含不同程度的噪声。图像噪声多数情况是随机产生的,因此具有分布和强度不规律的特点。这些噪声对以后的处理过程产生影响,致使图像失真,所以为了使图像被恢复到尽可能的接近真实,去噪处理对图像预处理而言就显得尤为重要。现阶段,图像噪声滤波方法较常用的有邻域均值滤波、高斯滤波、中值滤波、自适应平滑滤波、小波域滤波等。
1)邻域均值滤波。均值滤波是一种线性滤波方法,用这种方法对图像进行处理,其优点是分析简单、易于实现。均值滤波原理是用均值代替原图像中的各个像素值,是一种直接的空间域滤波方法。
2)高斯滤波。根据高斯函数的形状来选择权值的一种滤波方法被称为高斯滤波,该种方法也归属于线性平滑滤波。对于剔除服从正态分布的噪声,应用高斯平滑滤波器还是非常有效果的。
3)中值滤波。中值滤波(Medianfilter)方法有着非常广泛的应用,它基于排序统计理论,是一种非线性的去噪方法,该种滤波方法能够在一定范围内有效地抑制非线性噪声。
4)自适应平滑滤波。该滤波的算法思想是,利用预先设置好的一个局部加权模板与待处理信号进行迭代卷积,令加权系数在每次迭代卷积时随着不同的像素点进行改变,把它构造成像素点的梯度函数。同时设定一个恒定参数,使滤波器的加权系数对其具有依赖性,待处理图像的最后输出的边缘幅度就是取决于该参数的取值。
5)小波域滤波。小波去噪方法包括了投影方法、阈值萎缩法、相关方法等三类方法。阈值萎缩法比较容易理解,就是对待处理图像的小波系数预先设置一个阈值,当小波系数大于这个阈值时,即认为该小波系数是来自包含噪声变换结果的有用信号,这类小波系数的幅值一般都比较大,而当小波系数小于这个阈值时,则认为该小波系数完全是由需要剔除的噪声变换而来。
3 发展动向
1)美国海军启动反潜/反舰声学和图像信号处理长期研究项目。美国《海军观察》2013年3月29日报道:美国海军研究机构已经启动针对先进声学和图像信息处理(用于探测、跟踪和攻击敌方舰艇)的长期项目[3]。
美国海军海上系统司令部发布了一份预征询书(N0002413IWS5A01),旨在征询与潜艇/水面舰船声学、成像、作战系统信号处理项目有关的先进水下技术相关的研究方向。
海军研究人员将于2013年4月16日在马纳萨斯向工业界介绍项目的详细情况,介绍内容为保密内容。项目的第一阶段要求有兴趣的公司在2014年3月21日前提交建议白皮书。
项目将围绕与成像、主/被动信号处理、自动化、接触管理、接触跟随、目标动作分析、信息管理、嵌入式训练、任务计划、声纳战术决策辅助、直观的操作员界面/人机接口、舰上实时重建工具、鱼雷探测、加密、定位、鱼雷防御、电子战和导航相关的基础和应用研究。
海军研究人员表示,在通过采办项目将这些有应用前景的技术提交给舰队之前,他们计划先进行系统原型测试。
该项目将分为两个阶段,第一阶段将邀请感兴趣的公司递交相关技术研究的白皮书以描述技术方法、研究基础、能力、以往性能和成本预测。根据其白皮书的情况,海军将选择公司参与项目第二阶段,第二阶段最长为期5年,包括完善技术和开发用于实验室和海试的系统原型。
2)美国海军科学家开发加强水下成像的新方法。美国《海军技术》2013年5月9日报道:美国海军空战中心飞机部(NAWCAD)的工程师正在开发和验证一种新的方法,以加强水下成像系统在复杂水域的性能表现[4]。
新的水下光学成像方法主要涉及将激光进行雷达脉冲编码,以改进成像质量,该方法可加强舰队在探测水雷和海底成像方面的能力。
从目标和周边环境反射回的光线包含了精确成像所需的全部信息。与传统激光成像系统将发射设备和接收设备放在同一个平台上不同,新成像系统将发射设备和接收设备分别放置在不同的平台上。远程接收设备可以放置在飞机、舰船或其他水下平台上,将以无线方式接收发射设备产生的雷达编码激光信息进行解码,再由成像处理器对数字信号进行解码并生成图像。
独立平台的方法还使设备可以放置在更小型的平台上,从而可以更加安静地接近目标。
与传统声纳相比,水下激光成像在浅水海域受到的限制较少,可以从一个方向发起探测。目前,海军空战中心飞机部正在寻求工业伙伴来商业化该项新技术。
3)美国防高级研究计划局开发水下无人网络平台用以支持有人操作舰艇。美国国防高级研究计划局网站2013年8月22日报道:目前美海军作战主要依靠多功能有人操作平台,但即使最先进的舰艇每次也只能在特定位置作战,使响应能力越来越依赖于特定时间特定地点的战备状态。由于部队削减计划和财政限制,海军舰艇数量持续减少,试图覆盖全球广大区域时愈发感到力不从心。为维持对敌作战优势,美海军需要找到同时在多个地点投送关键能力的方法,而无需为此建造更多的舰艇[5]。
为解决此类问题,美国防高级研究计划局(DARPA)已经开展“九头蛇”(Hydra)项目。该项目名称来源于希腊神话中的多头生物,目的是开发无人有效载荷和平台的分布式水下网络,以补充有人操作舰艇。该系统通过新方式集成当前技术和新兴技术,创造出提供空中、水面、水下多种能力的替代方法。最终目标是增强军力,实现快速、可扩展和性价比高的资产部署。
DARPA项目经理斯科特·利特菲尔德称,目前既面临预算紧缩问题,又有不确定的安全因素,包括自然灾害、海盗、无政府状态及国防技术的扩散。水下无人技术基础设施能缓解一定财政压力,并在日益具有挑战性的环境中增强军事能力。
DARPA为“九头蛇”系统寻求概念和技术方案,技术关键是研发模块化的有效载荷,提供情报、监视和侦察(ISR)以及扫雷等关键能力。每个有效载荷模块将插入一个标准化的外壳,能安全运输、放置并发射各种有效载荷,使有效载荷的功能维持数周到数月。“九头蛇”系统注重有效载荷的可扩展性、快速重置和能力最大化。舰艇、潜艇或飞机可将“九头蛇”系统放置在濒海区域(海岸线附近的国际浅水区域)。
“九头蛇”通信系统设备将与有人操作平台协同作用,增强有人操作平台的效用,也可在视距外进行远程控制,扩大作战范围。此外,该系统还能实现其他目前有人操作平台不能执行的新能力,例如为机载ISR的前线部署提供低成本平台,或者为执行ISR任务的水下潜航器提供充电中心。
利特菲尔德表示,“九头蛇”系统能在任何需要的地方,更快速、更低廉地投送不同平台的各种能力,使空中、水下和水面作战更好地完成任务。
4)美国海军作战部长批准水下作战概念。美国全球安全网2013年9月9日报道]美海军作战部长最近批准了水下作战概念(UDOC),以确保未来继续保持水下优势[6]。
UDOC是由美海军作战发展司令部(NWDC)、指挥官、潜艇部队和其他相关部门共同开发的,用来激励创新技术发展。该概念是许多新构想的综合体现,描述了如何延伸水下作战理论的应用以促进跨域协同,提供重要的联合作战优势。
UDOC提出了一个概念性的框架,高级军事领导人可以在联合作战中更好地认识和应用水下作战效用及其能力。UDOC还探索了几个具体的水下作战策略,以及一些延伸水下作战领域应用的能力。附带的行动计划包括对此概念的综合、应用和操作,将有助于形成未来理论和战术、技术和程序。
海军作战发展司令部司令斯科特·哲贝克少将称,国家以及盟友的安全越来越取决于我们在海域的优势。水下作战概念为保护我们在海域的自由行动提供了一种新方法。
5)美国进行新型水下无人机航母项目演示。澳大利亚空间战网站2013年9月10日报道:美国国防部高级研究计划局(DARPA)正在考虑一项水下无人机航母项目[7]。
新水螅水下无人机航母项目的演示:美国国防高级研究计划局(DARPA)最近在约翰霍普金斯大学应用物理实验室举行了一次新水螅水下无人机航母项目的演示。该项目将开发和演示一个无人水下操作系统,提供一个新颖的输送装置将无人机和无人潜航器送入作战环境。为了招徕军事承包商,DARPA的战术技术办公室(TTO)设想他们的水螅无人潜航器将使用“装有标准化附件的模块有效载荷,可快速进行部署”。
水螅项目的应用:水螅项目预计将部署无人潜航器(UUV)和“常规”无人机(UAV)。DARPA的工程师也在考虑开发能潜水的一个特殊的船舱用于秘密水下运输部队。“越来越多不受约束的国家行为、海盗行为和敌对国家日渐增强的海上防御能力严重地影响了目前的资源和国家进行特种作战和应急任务的能力,”DARPA的提案文件表示。从广义上说,水螅项目意味着建立一个无人潜航器以确保监视、后勤和进攻能力在任何给定时间,在世界各地的海洋,包括浅水域和任何可能的三角洲。DARPA预计如果能获得足够的资金,2018年他们将拥有一个水下水螅无人机网络的功能演示。
这一切听起来像科幻小说,但无人机部署无人机将成为无人作战的未来。与水螅项目同时开发的项目还有,DARPA正在与洛克希德·马丁公司开发一个类似的程序旨在开发无人机通过飞机和地面供应军队。
上行下降的有效载荷(UFPs)概念:去年1月美国国防部高级研究计划局(DARPA)还宣布了另一个项目探索上行下降的有效载荷(UFPs)的概念,意味着在海床上存储用防水材料集装箱装载的必需品物资。然而DARPA发言人强调,上行下降的有效载荷(UFPs)和水螅是两个单独的项目。
上行下降的有效载荷(UFPs)和水螅项目的区别:基本的区别是,上行下降的有效载荷(UFPs)包括每次在深海底部部署系统好几年,而水螅项目则每次计划在浅水中数周或数月。水螅平台也存在应对自然灾害的需求,无人机能将应急设备运抵受灾地区的海岸线附近。
“水螅项目将以新的方法集成现有和新兴的技术来创建一个提供多种有效载荷接近使用环节的替代的方法,”DARPA发言人还表示。
6)巴布科克公司为英国未来战略核潜艇设计水下信号发射器。美国《海军技术》网站2013年10月7日报道:巴布科克公司从BAE系统公司获得一份合同,为英国海军未来战略核潜艇开发新型Mk12水下信号发射器(SSE)[8]。
Mk12 SSE采用模块化设计,可以保证该装置的研制进度,从而保证潜艇的建造周期。由于SSE能够为潜艇逃生和救援提供支持,因此该装置还可以满足潜艇特殊的性能和技术要求。为最大限度地提高潜艇的可靠性和性能,该公司正在着力提高SSE通用性,降低研发成本和全寿期成本,增强抗震水平等。
巴布科克公司曾为英国所有的潜艇提供SSE系统、武器运输和发射系统(WHLS)、前期采办和全寿期支持,包括“支持者”级、“特拉法尔加”级、“前卫”级和“机敏”级。
7)美国海军完成近海水下持续监视项目初始试验。《简氏防务周刊》2013年10月29日报道:美国海军已完成对非机载水下监视系统网络原型的初始水下试验,该原型在近海水下持续监视(PLUS)项目下研发。美国海军海上系统司令部(NAVSEA)于10月24日宣称,研究结果的初步分析表明,总体试验目标得以实现,近海水下持续监视系统计划如期进行[9]。
近海水下持续监视系统设计用于为近海水域的多个安静型目标提供自适应和持续监视。该系统是由美国海军海上系统司令部近海战斗舰计划执行办公室(PEO LCS)由早期的海军研究办公室创新海军样机研究转变而来,目的是满足确定的紧急作战需求,作战概念由海军作战部长办公室(OPNAY)、海军海上系统司令部(NAVSEA)、海军第五舰队指挥官、舰队司令部以及海军海洋办公室共同制定。
近海水下监视系统将自主无人潜航器和指挥中心相结合(其中自主无人潜航器由混合驱动无人潜航器(UUV)和海洋滑翔器组成,指挥中心用于处理从水中捕获的传感器信息),用于在近海水域提供被动探测和定位安静型柴电潜艇的能力。近海水下持续监视系统原型由5个海洋滑翔器(由华盛顿大学应用物理实验室研发)和6个REMUS 600型无人潜航器(由水螅公司生产)组成。近海水下持续监视系统中,REMUS 600型无人潜航器长时间水下停留,充当深海传感器节点,海洋滑翔器潜入水中收集REMUS 600型无人潜航器捕获的数据,然后返回水面,将数据传输给岸上收集和处理站。
初始试验于9月23日~27日在美国罗得岛纽波特的海军水下作战中心进行。试验目的是验证和证实最近对原型硬件软件的升级增强了系统在反潜战任务中的功能和性能。第五潜艇发展中队无人潜航器支队和近海战斗舰中队反潜战任务支队的成员参与试验,帮助设置任务场景并进行试验。试验为负责近海水下持续监视系统运作和维护的海军人员提供了宝贵的训练机会。
到2015年美国海军计划部署近海水下持续监视系统之前,原型试验还将继续进行。在未来几个月内,将决定该系统部署于哪种近海战斗舰上。试验结果还将决定扩大该系统部署范围的可行性。
4 发展分析
水下目标技术的发展趋势:一是发展自动识别技术;二提高图像识别和分类的有效性和可靠性;三是发展图像的捕获和分析;四是促使国内的开发研究;五是发展光学成像技术[10]。
1)发展自动识别技术。水下目标的自动识别技术是国外列为其新世纪最为优先发展的关键的技术之一。例如,美军推出的BQQ-3的潜用声纳目标分类系统是为了占领水下目标的识别领域而全力研制的,在上世纪七十年代,美军即采用了基于1/3倍频程谱分析方法,以拖线阵为主体的BQQ-5潜用声纳来进行水下目标的捕捉和识别,随着时间的推移和技术的进步,美军在上世纪八十年代的时候就已经把米翠公司研制的海军指挥控制系统和斯坦福大学开发的目标识别专家系统等目标识别系统成功的移植到了海面舰艇上。人工神经网络的应用是在上世纪九十年代的事情,美国的D.F.Moore和R.H.Baran是这个领域应用的先行者和专家,他们的工作对后来的人们也起到了很好的示范作用。在英国,神经网络的应用是C.R.Gent和C.P.sheepard开发的被动声纳分类系统,他们使用该系统把特定的目标信号和其他类型的噪声或者干扰信号区别开;应用神经网络来区分信号的例子还有很多,比如美国的A.P.RuSS和J.Meister等开发了一些有针对性的分类器等,他们的成果都得到了很好的推广和应用,实践证明神经网络分类方法具有比较好的应用价值。
2)提高图像识别和分类的有效性和可靠性。从技术水平的角度看,国外现有的被动识别系统的正确分类率在80%~90%之间,但是军方的使用要求还是很高,需要技术领域不断地完善和修正算法,提高图像识别和分类的有效性和可靠性成为现在国外该领域专家们的共同追求的目标,他们的实验也从没有中断过,尤其是近年来一些新兴技术的发展,为该领域深入广泛的进步提高了有力的保证,可以预见,下一阶段的目标识别领域的开发大体上也会基于模糊系统、神经网络、专家系统等方面技术的成熟程度进行发展,对于水下目标的识别、分类与跟踪的研究更是提供一个很好的理论支撑,多个领域、多种技术的融合必将成为今后一个阶段发展的新趋势。
3)发展图像的捕获和分析。例如,美国ORCA-VII的研究成果视觉系统的任务就是对得到的图像进行捕获并分析,从而对目标的位置及方向进行确定。ORCA-VII配套的一个彩色视频CCD摄像机方位指向下方。再利用一个PC/l04组合图像采集卡,把获取到的图像信息储存在电脑硬盘里,接下来,系统的视觉算法会马上对图像进行分析处理,而且会将目标的实时信息传输给给上一级控制模块。通过对长方形物体的水池实验验证了该视觉系统的有效性。在我们的邻国日本,SK-8海岸预警系统是一个很好的应用例子,该系统采用了频率、强度进行比较的模板匹配方法进行目标识别的。在英国,有代表性的系统是由Plymouth和Cranfield联合开发的AUV“Hammerhead”,由于该系统配套应用了激光条纹照明系统(LSI),所以成像能力较强成为它的显著特点。LSI系统的优势在于彩色视频CCD摄像机的整个可视范围(FOV)都能够被它所利用,采集到更多有用的信息,此系统在水下工作时,能够很方便地利用LabVIEW IMAQMT图像处理工具包连续对图像进行捕捉并进行实时处理,结果被送到上一层模块,实现对目标的实时跟踪。
4)促使国内的开发研究。国外在该领域的技术发展,也促使了国内潜用水下目标识别系统的开发研究。
5)发展光学成像技术。水下目标识别是目前智能机器人技术发展的关键能力之一,既要发挥光学成像技术分别率高的优势,又要克服噪声。
5 结语
国外对水下目标探测、跟踪领域的技术开发从来没有放松过,相关的理论、算法和实验室仿真技术也在不断地提高,并取得了一系列的成果[11]。
[1]郭宝龙,武晓玥,李雷达.一种新的有效消除图像中Gibbs噪声的算法[J].中国激光,2010,37:769-773.
[2]武晓玥,郭宝龙,唐璐,等.一种新的基于非下采样Contourlet变换的自适应图像去噪算法[J].光学学报,2009,29:2147-2152.
[3]美国海军启动反潜/反舰声学和图像信号处理长期研究项目[N].每日防务快讯,2013-04-14.
[4]美国海军科学家开发加强水下成像的新方法[N].每日防务快讯,2013-05-14.
[5]美国防高级研究计划局开发水下无人网络平台用以支持有人操作舰艇[N].每日防务快讯,2013-08-30.
[6]美国海军作战部长批准水下作战概念[N].每日防务快讯,2013-09-17.
[7]美国进行新型水下无人机航母项目演示[N].每日防务快讯,2013-09-17.
[8]巴布科克公司为英国未来战略核潜艇设计水下信号发射[N].每日防务快讯,2013-10-16.
[9]美国海军完成近海水下持续监视项目初始试验[N].每日防务快讯,2013-11-08.
[10]唐珮珺,陈飞虎,唐志列.偏振态的可视化及其成像技术的研究[J].光学学报,2013,33:826002-1.
[11]韩彪,刘继芳,周少杰,等.检偏角对水中光脉冲后向散射特性的影响[J].光子学报,2011,40:73-77.
DevelopmentAnalysisoftheUnderwaterTargetRecognitionTechnology
SONG Bo
(Navy Faorce Representative Bueau in Dalian 426 Factory, Dalian 116005)
The underwater target recognition technology plays more and more important roles in the war today. The process of development of the underwater target recognition technology abroad and equipments in all countries over the world and its modification are described. The technique performance and properties of several the underwater target recognition technology seekers are analyzed, and development trend and analysis of the the underwater target recognition technology are discussed.
underwater target recognition, development analysis
2013年10月11日,
:2013年11月30日
宋波,男,硕士,高级工程师,研究方向:舰船电子系统。
TN97DOI:10.3969/j.issn1672-9730.2014.04.047
