一种机械臂的自适应控制方法
2014-07-12姜龙光张举中
姜龙光,张举中
(1.海装舰船办公室,北京100071;2.中国船舶重工集团公司第七一三研究所,河南 郑州450015)
一种机械臂的自适应控制方法
姜龙光1,张举中2
(1.海装舰船办公室,北京100071;2.中国船舶重工集团公司第七一三研究所,河南 郑州450015)
针对某二自由度机械臂,被控对象随着机械臂姿态变化而发生非线性变化的特点,提出一种自适应的控制方法。控制器根据机械臂的姿态,实时计算关节的等效转动惯量,在线调整系统增益,并加入重力和摩擦等干扰补偿,对机械臂关节的角位移进行有效控制。仿真结果表明,与常规的PID控制算法相比,该方法具有更强的自适应能力,取得了比较满意的控制效果,可以推广应用到多自由度机械臂的控制系统中。
机械臂;非线性;自适应控制;系统增益
0 引言
串联型多自由度机械臂是对人手臂形状和功能的仿制,自20世纪问世以来,不仅已成为工业制造中的重要设备,而且正以迅猛的速度向军事、服务和娱乐等行业广泛渗透,具有广阔的应用前景。
由于机械臂的结构比较复杂,具有强耦合性、非线性和参数变化等特点,从而导致机械臂的控制面临较大的挑战,常规的PID控制通常难以取得满意的控制效果。针对上述问题,国内外的专家学者提出了许多解决方法[1-4]。文献[5]以转动关节的加速度为基础分析了机器人关节加速度反馈控制的开环模型,提出了闭环控制策略的设计准则,并在一台三自由度直接驱动机器人上作了实验研究;文献[6]利用神经网络为闭链双臂空间机器人设计了力/位协调控制方案,达到了双重控制效果;文献[7]设计了一种基于径向基函数神经网络的自适应控制器,实现了机器人力/位混合轨迹跟踪控制,并证明了控制器输出力和位置误差的最终一致有界;文献[8]考虑了关节摩擦力,在位置/力控制中采用模糊神经网络对摩擦进行补偿;文献[9]针对斯坦福大学的六自由度的关节机械臂,将广义预测控制与elman网络相结合,设计了一个智能控制器用来控制机械臂各关节的角位移与角速度;文献[10-11]针对机械臂模型误差和外界干扰问题提出一种模糊变结构控制方法。
本文针对一个二自由度直驱机械臂运动控制系统,建立了被控对象的数学模型,根据机械臂的姿态实时计算各关节的等效转动惯量和补偿量,结合单位质量控制方法对机械臂关节的角位移进行了控制研究。
1 数学机理模型
图1为某匀质两连杆机械臂,θ1和θ2分别为肩关节和肘关节的角位移rad,以肩关节为研究对象,建立运动学方程:

式中:J(θ2)为机械臂肩关节的等效转动惯量,kg·,随着肘关节角位移θ2的变化而成非线性变化;T为摩擦转矩,N·m,通常为转速的非线性
f函数;MG(θ1,θ2)为重力等效转矩,N·m,与机械臂的姿态相关,是肩关节和肘关节角位移的非线性函数;τ1为机械臂肩关节的驱动转矩,N·m。
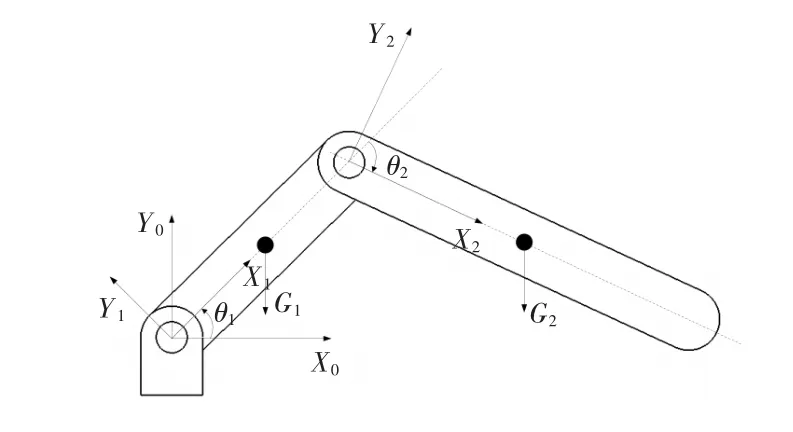
图1 两连杆机械臂结构简图Fig.1 The structure of two-link manipulator
对式(1)进行拉普拉斯变换,以机械臂肩关节的驱动转矩τ1为输入,以肩关节的角位移θ1为输出,可以得到肩关节角位移的控制系统开环方块图如图2所示。
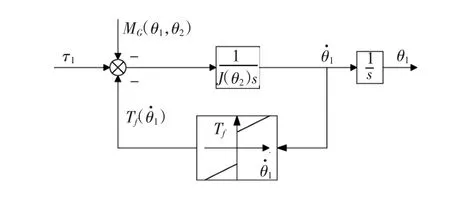
图2 机械臂肩关节角位移控制系统开环方块图Fig.2 The open loop control system for the angle of shoulder joint
由图2可得

从式(1)、式(2)和图2中可知,被控对象——机械臂肩关节的动态模型具有非线性和参数变化的特点。
2 控制器设计
2.1 常规PID控制器的设计

式中,m1和m2分别为连杆1和连杆2的质量,kg;L1和L2分别为连杆1和连杆2的长度,m;g为重力加速度,m/s2。
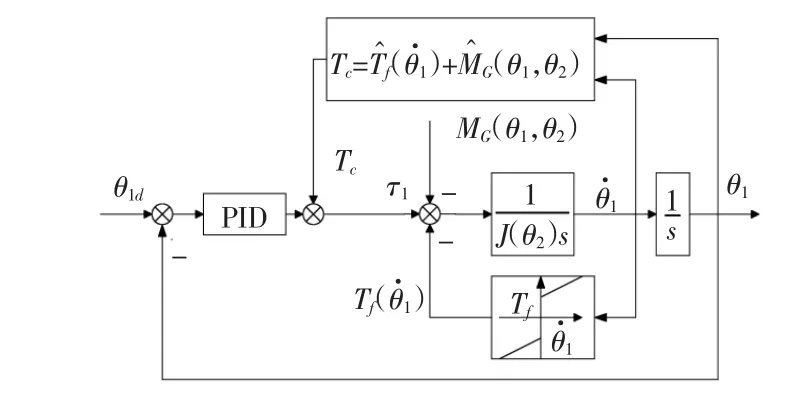
图3 肩关节角位移常规PID控制系统方块图Fig.3 The traditional PID control system for the angle of shoulder joint
2.2 自适应控制器的设计
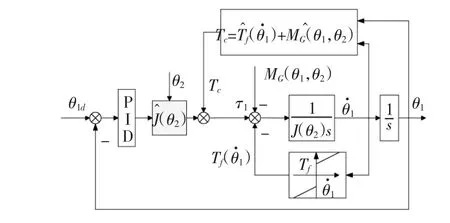
图4 肩关节角位移自适应控制系统方块图Fig.4 The adaptive control system for the angle of shoulder joint
与常规PID控制器相比,自适应控制器增加了肩关节等效转动惯量估计的环节,从而使固定增益的PID控制器转化为可变增益的PID控制器。自适应控制器中的PID控制器按单位质量的被控对象进行设计;肩关节等效转动惯量的估计值J^(θ2)计算过程如下:

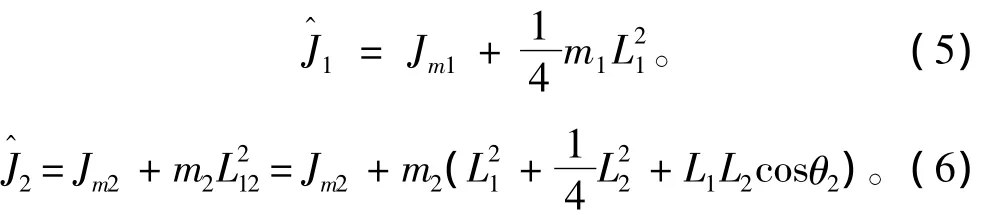
式中:Jm1和Jm2分别为连杆1和连杆2绕各自质心坐标系中Zmi轴 (i=1,2,Zmi轴与Z1轴平行)旋转的转动惯量,kg·m2。
对比常规PID控制器,自适应控制器中的控制参数根据机械臂的姿态自动调节,更有利于提高控制的精度。
3 仿真验证
为了验证自适应控制器的特性,对机械臂肩关节角位移常规PID控制系统和自适应控制系统进行对比仿真,仿真参数见表1。
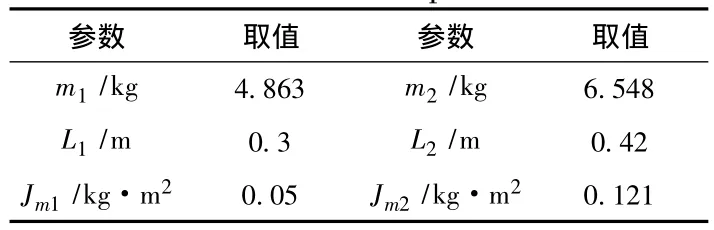
表1 仿真参数表Tab.1 Simulation parameters
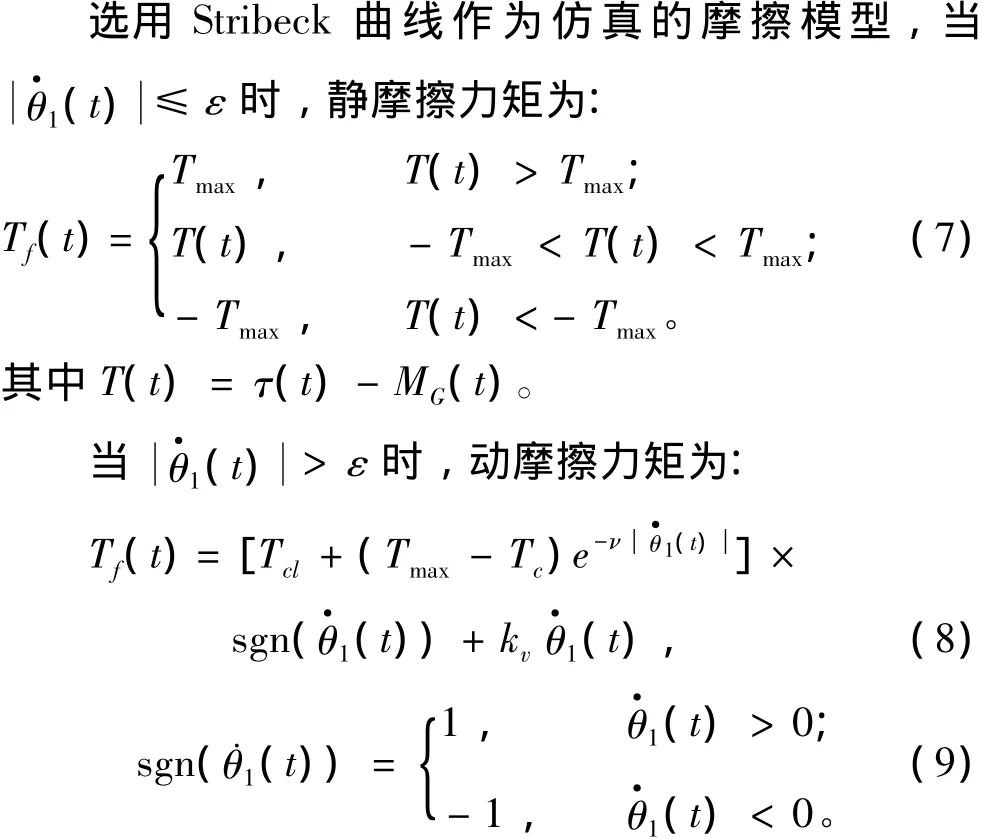
式中:Tmax为最大静摩擦力矩;Tcl为库仑摩擦力矩;kv为粘性摩擦力比例系数;ε和ν为非常小的正的常数[12]。
下面分4种情况,在Matlab Simulink对机械臂肩关节控制系统进行仿真验证。
情况1:取θ2(t)=π,输入指令
仿真结果如图5所示。
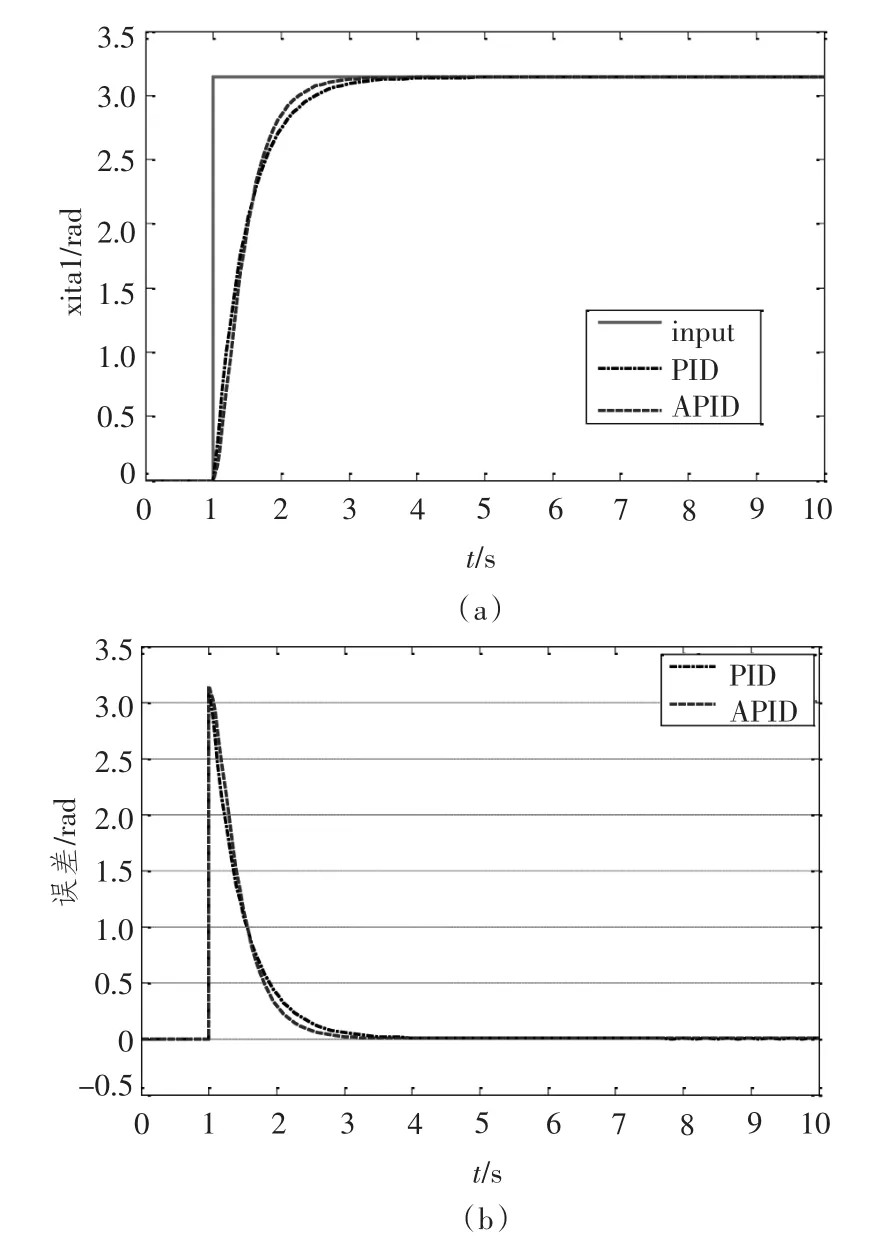
图5 肩关节角位移跟踪曲线图 (情况1)Fig.5 The angle trace curve of shoulder joint(caseⅠ)
图中,input表示输入指令,PID表示常规PID控制跟踪曲线及误差曲线,APID表示自适应控制跟踪曲线及误差曲线。以下若无特殊说明,定义均与上述相同。
从图5可看出,常规PID控制的跟踪曲线刚开始稍超前于自适应控制的跟踪曲线,而后滞后于自适应控制的跟踪曲线。
从图6可以看出,常规PID控制的跟踪曲线一直滞后于自适应控制的跟踪曲线。
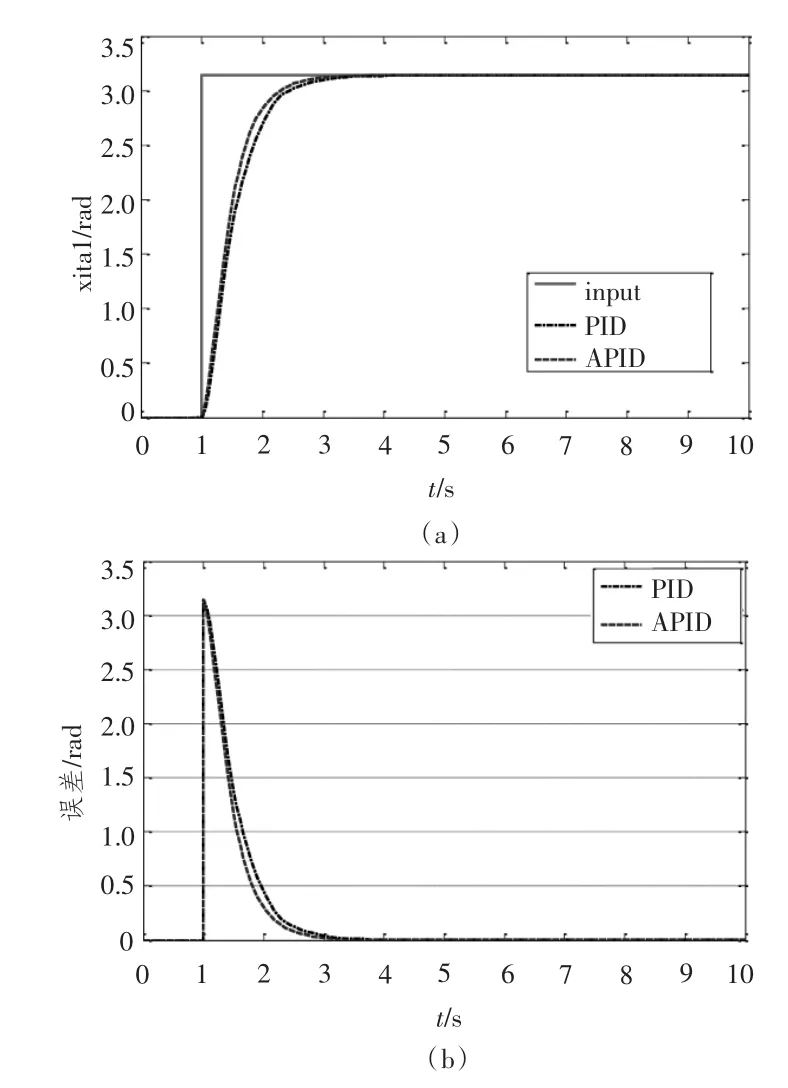
图6 肩关节角位移跟踪曲线图 (情况2)Fig.6 The angle trace curve of shoulder joint(caseⅡ)

图7 肩关节角位移跟踪曲线图 (情况3)Fig.7 The angle trace curve of shoulder joint(caseⅢ)
从图7可看出,常规PID控制的跟踪误差几乎是自适应控制跟踪误差的2倍。
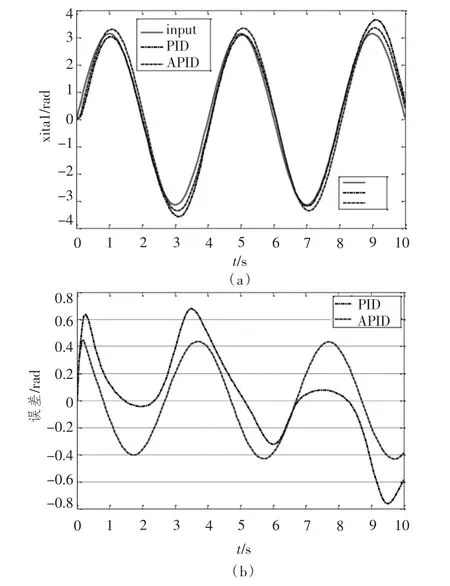
图8 肩关节角位移跟踪曲线图 (情况4)Fig.8 The angle trace curve of shoulder joint(caseⅣ)
从图8可看出,常规PID控制的跟踪误差波动较大,当仿真进行到9.5 s左右时,其跟踪误差几乎达到自适应控制跟踪误差的2倍。
通过上述4种情况的对比仿真可以看出,自适应控制与常规PID控制相比,具有跟踪性能稳定、控制精度高、误差波动范围小和鲁棒性强等优点。
4 结语
由于机械臂关节控制系统具有非线性和参数变化等特点,传统的基于线性定常系统的控制方法很难取得理想的控制效果。因此,只有采用先进的控制方法才能改善被控对象的动态特性,提高控制品质。仿真情况表明,本文采用的自适应控制方法是有效可行的,在机械臂关节控制中具有一定的参考价值。
[1]SUN Fu-chun,SUN Zeng-qi,WOO P Y.Neural network -based adaptive controller design of robotic manipulators with an observer[J].IEEE Trans.Neural Netw,2001,12(1):54-67.
[2]WAI R J.Tracking control based on neural network strategy for manipulator[J].Neurocomp,2003,51:425 -445.
[3]LORINC M,BELA L.Control of robotic systems with unknown friction and payload[J].IEEE Transactions on Control Systems Technology,2011,19(6):1534 -1539.
[4]于志刚,沈永良,宋申民.机械臂鲁棒自适应运动控制[J].控制理论与应用,2011,28(7):1021 -1024.
YU Zhi-gang,SHEN Yong-liang,SONG Shen-min.Robust adaptive motion control for manipulator[J].Control Theory and Applications,2011,28(7):1021 -1024.
[5]韩建达,谈大龙,蒋新松.直接驱动机器人关节加速度反馈解耦控制[J].自动化学报,2000,26(3):289 -295.
HAN Jian-da,TANG Da-long,JIANG Xin-song.Joint acceleration feedback control for direct-drive robot decoupling[J].Acta Automctica Sinica,2000,26(3):289 -295.
[6]陈志煌,陈力.闭链双臂空间机器人抓持载荷基于径向基函数神经网络的补偿控制[J].机械工程学报,2011,47(7):38-44.
CHEN Zhi-huang,CHEN Li.Compensation control for grasped object of dual-arm space robot with closed-chain based on radialbasisfunction neuralnetwork[J].Mechanical Engineering,2011,47(7):38 -44.
[7]吴宝强,孙炜,曹成.柔性和摩擦力不确定条件下RBF神经网络自适应轨迹跟踪方法[J].机械工程学报,2012,48(19):23 -28.
WU Bao-qiang,SUN Wei,CAO Cheng.RBF neural network adaptive trajectory tracking control under conditions of uncertain compliance and friction[J].Journal of Mechanical Engineering,2012,48(19):23 -28.
[8]KIGUCHI K,FUKUDA T.Position/Force control of robot manipulators for geometrically unknown objects using fuzzy neural networks[J].IEEE Trans.Ind.Electron,2000,47(3):389 -391.
[9]KÖKER R.Design and performance of an intelligent predictive controller for a six-degree-of-freedom robot using the Elman network[J].Information Sciences,2006,176:1781 -1799.
[10]林雷,王洪瑞,任华彬.基于模糊变结构的机械臂控制[J].控制理论与应用,2007,24(4):643 -650.
LIN Lei,WANG Hong-rui,REN Hua-bin.Fuzzy-based variable structure control for robotic manipulators[J].Control Theory and Applications,2007,24(4):643 -650.
[11]党进,倪风雷,刘业超,等.一种前馈补偿和模糊滑膜相结合的柔性机械臂控制[J].西安交通大学学报,2011,45(3):75-80.
DANG Jin,NI Feng-lei,LIU Ye-chao,et al.Control strategy for flexible manipulator based on feedforward compensation and fuzzy-sliding mode control[J].Journal of Xi'an Jiaotong University,2011,45(3):75 -80.
[12]KARNOPP D.Computer simulation of stick-slip friction in mechanical dynamic systems[J].Journal of Dynamic Systems,Measurement and Control,1985,107:100-103.
An adaptive control approach for manipulator
JIANG Long-guang1,ZHANG Ju-zhong2
(1.Armament Department of the Navy,Beijing 100071,China;2.The 713 Research Institute of CSIC,Zhengzhou 450015,China)
In order to control a two-degree-of-freedom manipulator with the characteristics of the dynamics varying nonlinearly as the pose varying,an adaptive control approach is brought forward.According to the pose of manipulator,the real-time controller calculates equivalent moment of inertia of the joint,and tunes sysemic gain on line,and adds the compensation of gravity and friction,then the angle of manipulator is controlled effectively.The simulation indicated that,compared with traditional PID control law,this approach acquired good performance with stronger adaptive capacity,and it can be applied in the control system of more degrees of freedom manipulator.
manipulator;nonlinearity;adaptive control;systemic gain
TM301;TP242
A
1672-7649(2014)06-0129-05
10.3404/j.issn.1672-7649.2014.06.026
2014-04-17;
2014-05-23
姜龙光(1963-),男,硕士,高级工程师,从事航空技术保障研究。
