基于地标信息的车载惯导姿态修正技术
2014-07-12李瑞涛徐胜红曹文静
李瑞涛,徐胜红,曹文静
(海军航空工程学院控制工程系,山东烟台264001)
基于地标信息的车载惯导姿态修正技术
李瑞涛,徐胜红,曹文静
(海军航空工程学院控制工程系,山东烟台264001)
惯导与速率计构成的组合系统是机动作战车辆较常使用的自主定位定向系统,其惯导姿态精度将直接影响组合定位精度。文章利用车辆运动途中的地标信息,讨论了车载惯导姿态误差估计与修正技术,通过仿真分析了地标位置与车辆零速信息在惯导姿态修正过程中的作用。结果表明:利用地标信息是进行车载惯导姿态修正较为实用的途径,在此基础上可以有效提高车载惯导/速率计组合定位系统的精度。
惯导系统;组合定位;地标点;姿态误差
车载导航系统用途日益广泛,目前民用车辆大多采用GPS,而军用机动装备的关键车辆为满足自主导航需求,则多选取多种导航手段配合使用[1-4],其中以惯导系统与速率计组合的导航方式最为常见。车载惯导/速率计组合导航系统通常利用惯导姿态信息结合速率计提供的里程数据进行实时定位计算,因而这类组合系统对惯导姿态精度要求较高。惯导系统工作自主性和抗干扰能力强,但是其姿态误差会随时间逐渐增大,这就导致组合系统的定位误差也会随时间增大。
为改善组合系统定位精度,在实际系统中往往采取用地标点位置数据直接补偿组合导航位置参数的方法进行位置修正。显然,这种方式仅仅修正组合系统的位置输出,并不能改善惯导姿态输出精度。
随着组合导航系统应用日益广泛,对组合导航系统的各方面性能要求也越来越高。在很多组合导航系统中,各子系统通过最优滤波方法实现了信息的深度融合,能够全面提高导航系统的性能[5-8]。鉴于此,在分析车载捷联式惯导误差模型基础上,利用地标点位置等信息,应用最优滤波算法估计车载惯导的姿态误差。该误差估计值用于车载惯导的输出或反馈校正,能够提高惯导系统的姿态输出精度。
仿真结果表明:利用地标位置数据可以较好地估计出惯导姿态误差,而同时利用地标位置和车辆零速信息时,则惯导姿态误差估计效果更好;在此基础上,车载惯导/速率计组合定位系统的精度可以得到有效提高。
1 车载捷联式惯导误差模型
目前的实际应用中,车载惯导系统有平台式和捷联式2类,不过随着捷联惯导系统技术越来越成熟、应用越来越普遍,在今后一般的车载应用场合将以捷联惯导为主。这里以指北方位捷联惯导系统[9]为例进行讨论。
考虑到在车载条件下,通常垂向速度相对较小,而且很多时候高度数据并不是必需的,因而选择捷联惯导系统的状态向量[3](共7维)为

根据文献[3]给出的捷联惯导一般误差方程,结合车载条件下的导航需求,通过适当简化,可以得到车载捷联惯导误差方程展开式表示为:
式(2)中,各参数定义参见文献[3]。
2 基于地标位置的车载惯导姿态修正
2.1 基本方案
车辆行驶过程中的地标点是位置已知的点,可以是事先经过精确位置测量的单个标志点,也可以是一些具有显著特征且位置已知的标志物。可见,位置信息是地标点能够提供的最基本的参考信息。
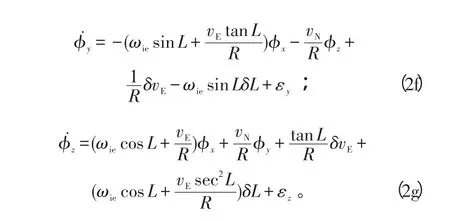
基于地标位置数据的车载惯导姿态修正基本方案如图1所示。车辆在地标点暂时停车,将车载惯导位置数据与地标位置数据进行比较,通常地标位置是比较精确的,这样就得到惯导位置误差;利用该误差值作为状态估计滤波器的输入值估计惯导姿态误差。
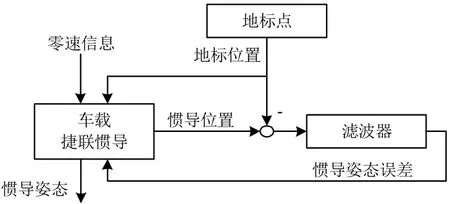
图1 基于地标位置的车载惯导姿态修正方案示意图Fig.1 Schematic diagram of the vehicle INS attitude correction based on landmark position
在车辆行驶途中,利用地标点数据对车载惯导进行修正是间断性的。为确保惯导在较长工作时间内仍具有较好的精度,在对惯导参数进行修正时,采用反馈校正方式(如图1所示)为好。其中,惯导位置和速度直接采用地标位置数据和零速信息更新,惯导姿态则用估计得到的姿态误差加以修正。
2.2 系统方程
按照利用地标位置的姿态修正基本方案,车辆在地标点停车,但惯导设备正常工作。在静态条件下,式(2)所示的系统误差方程可简化为:
式(3)中,g是当地重力加速度值。
按式(1)确定系统状态变量,则系统状态方程为

式(4)中:F、G分别是状态向量和噪声向量的系数矩阵;W是系统噪声,且W=[∇E,∇N,εx,εy,εz]T。
当车辆在地标点停车时,将地标点位置数据与惯导输出位置参数进行比较得到惯导位置误差,该误差作为惯导姿态误差估计的量测值,即Zp=[δλ,δL]T,则得到系统量测方程为

3 基于位置和零速信息的车载惯导姿态修正
3.1 基本方案
地标点能够提供较为准确的位置数据,而车辆在地标点停车修正过程中是静止的,此时车辆速度为零。在车载惯导姿态修正时,车辆的零速信息也是可以利用的重要信息[10-11]。
基于地标位置数据和车辆零速信息的车载惯导姿态修正基本方案如图2所示:车辆在地标点暂时停车,将车载惯导位置数据与地标位置数据进行比较得到惯导位置误差,再将车载惯导速度输出值与零速进行比较得到惯导速度误差;利用比较得到的位置和速度误差值作为状态估计滤波器的输入值估计惯导姿态误差。
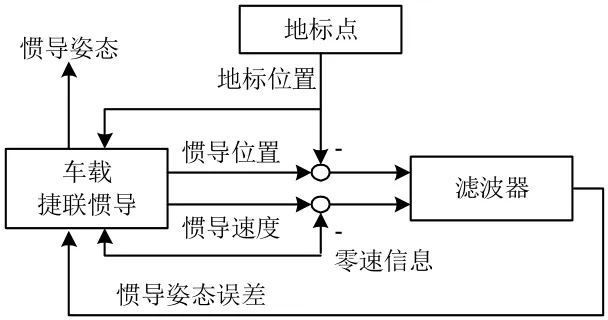
图2 基于位置和零速信息的车载惯导姿态修正方案示意图Fig.2 Schematic diagram of the vehicle INS attitude correction based on position and zero velocity information
3.2量测方程
按照基于地标位置和车辆零速信息进行惯导姿态修正的基本思路,通过给定地标位置数据,结合车辆静止状态的零速信息,估计惯导系统姿态误差用于惯导修正。此时,系统状态方程直接采用式(4),进行惯导姿态误差估计的量测值则包括惯导位置误差和速度误差,即
系统量测方程表示为

4 仿真与分析
将基于地标位置、基于位置和零速信息这2种车载惯导姿态修正方案与仅进行位置直接校正的原有方案进行仿真分析比较。在仿真中,车载惯导在出发地进行精确对准后正常行驶约30min后到达已知地标点位置,进行相应方案的惯导修正后,车辆再回到出发地,考查惯导定位和姿态数据;车载惯导主要参数设定为:加速度计零偏10-5g,陀螺仪漂移0.001(°)/h;在前2种方案中,选用Kalman滤波算法进行惯导姿态误差等参数估计[6,12]。仿真结果如图3~5所示。为方便进行比较,图4和图5中没有体现停车状态下的惯导姿态误差估计时间。
图3所示的是按原有方案以地标数据进行惯导位置直接校正时,惯导输出经纬度、航向角和俯仰角等参数误差变化曲线。按基于地标位置的姿态修正方案仿真所得到的惯导经纬度、航向角和俯仰角等参数误差变化曲线如图4所示。按基于位置和零速信息的姿态修正方案仿真所得到的惯导经纬度、航向角和俯仰角等参数误差变化曲线如图5所示。
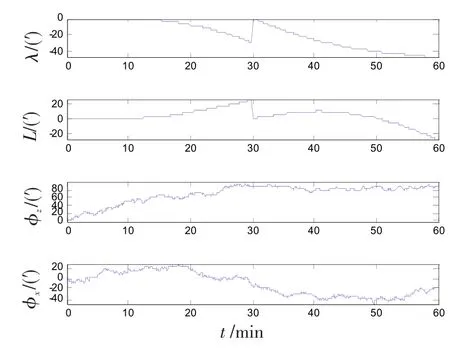
图3 位置直接修正的车载惯导参数误差曲线图Fig.3 Vehicle INS error curves graph of direct position correction
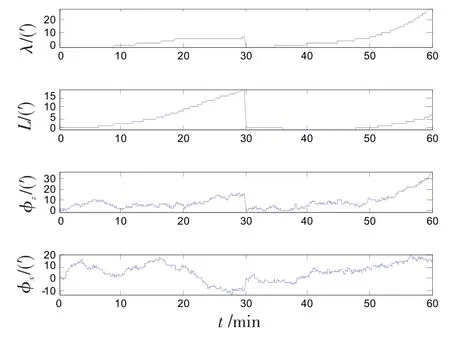
图4 基于地标位置的姿态修正车载惯导参数误差曲线图Fig.4 Vehicle INS error curves of attitude correction based on landmark position
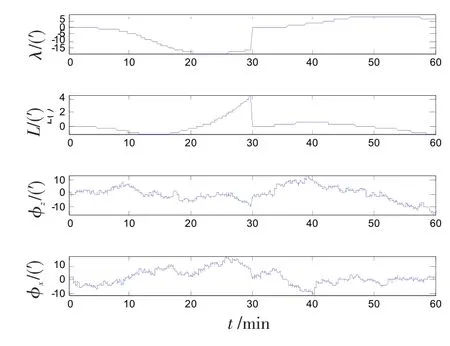
图5 基于位置和零速信息的姿态修正惯导参数误差曲线图Fig.5 Vehicle INS error curves graph of attitude correction based on position and zero velocity information
从图3中可见,原组合定位系统中,惯导仅在地标点进行位置数据的直接校正,位置误差在修正后有所改善,但对姿态误差没有影响;与之相比较,如图4~5所示,在基于地标位置、基于位置和零速信息进行惯导姿态修正后,惯导位置和姿态误差都有所减小。其中,基于位置和零速信息的修正方案改善更为明显。
为考查惯导姿态修正的作用,进一步以惯导姿态/速率计里程信息组合的方式进行车辆定位解算,通过多次仿真,将多组结果按文献[3]给定的定位误差分析方法进行定位误差计算。其中,设定速率计测量误差为2‰D,D是车辆行驶里程。3种方案中车辆定位误差见表1。从表1可看出,在进行惯导姿态修正后,车载惯导/速率计组合系统的定位精度有较大提高。

表1 车载组合系统定位误差的比较Tab.1 Comparison of positioning error of the vehicle integrated system
5 结束语
军用机动装备车辆对导航自主性要求很高,以惯导为核心的车载导航系统使用日益广泛。目前常用的惯导/速率计组合的导航系统中,利用惯导姿态信息结合速率计里程数据进行实时定位的方式应用比较成熟,而这类组合系统对惯导姿态精度要求较高。为改善组合系统定位精度,在分析车载捷联式惯导误差模型基础上,研究了利用地标点位置和零速等信息,应用最优滤波算法估计车载惯导姿态误差进行惯导姿态修正的方法。仿真结果表明:利用地标信息可以较好地进行车载惯导姿态估计和修正。其中,利用地标位置和车辆零速信息作为观测量效果更好,且能够获得更高的惯导/速率计组合定位精度。
[1] 刘占荣,刘全.自行武器系统的定位定向方法探讨[J].情报指挥控制系统与仿真技术,2003,11(1):33-36. LIU ZHANRONG,LIU QUAN.Study on position and azimuth determ ining method for self-propelled weapon system[J].Information Command Control System and Simulation Technology,2003,11(1):33-36.(in Chinese)
[2] MAINE A E.Dead-reckoning navigation systems for surface vehicles as an aid to resource exploration[J].Canadian Aeronautics and Space Journal,1995,12(1):1-23.
[3] 严恭敏.车载自主定位定向系统研究[D].西安:西北工业大学,2006:34-43. YAN GONGMIN.Research on vechile position and azimuth determ ining system[D].Xi'an:Northwestern Polytechnical University,2006:34-43.(in Chinese)
[4] CHEN G,GREJNER-BRZEZINSKA D A.Land-vehicle navigation using multiple model carrier phase DGPS/INS [C]//2001 American Control Conference.Arlington,VA,2001,6:2327-2332.
[5] 张宗麟.惯性导航与组合导航[M].北京:航空工业出版社,2000:334-336. ZHANG ZONGLIN.Inertial navigation and integrated navigation[M].Beijing:Aviation Industry Press,2000:334-336.(in Chinese)
[6] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998:12-28. QIN YONGYUAN,ZHANG HONGYUE,WANG SHUHUA.Kalman filter and theory of integrated navigation[M].Xi'an:Northwestern Polytechnical University press,1998:12-28.(in Chinese)
[7] 王仲涛,王龙,王楠.一种组合导航低成本地面验证技术[J].四川兵工学报,2012,33(3):59-64. WANG ZHONGTAO,WANG LONG,WANG NAN.A low cost integrated navigation ground verification technology[J].Journal of Sichuan Ordnance,2012,33(3):59-64.(in Chinese)
[8] 李璟璟,张迎春,郑靖,等.基于信息融合的大椭圆轨道卫星组合导航方法[J].宇航学报,2012,33(9):1233-1240. LI JINGJING,ZHANG YINGCHUN,ZHENG JING,et al.An information fusion based integrated navigation method for highly elliptical orbit satellite[J].Journal of Astronautics,2012,33(9):1233-1240.(in Chinese)
[9] 张树侠,孙静.捷联式惯性导航系统[M].北京:国防工业出版社,1992:138-158. ZHANG SHUXIA,SUN JING.The strap-down inertial navigation system[M].Beijing:National Defense Industry Press,1992:138-158.(in Chinese)
[10] 朱庄生,万德钧,王庆.航位推算累积误差实时修正算法研究[J].中国惯性技术学报,2003,11(3):7-11. ZHU ZHUANGSHENG,WAN DEJUN,WANG QING. A lgorithm study on real-time revising of dead reckoning accumulated errors[J].Journal of Chinese Inertial Technology,2003,11(3):7-11.(in Chinese)
[11] 高钟毓,王进,董景新,等.惯性测量系统零速修正的几种估计方法[J].中国惯性技术学报,1995,3(2):24-29. GAO ZHONGYU,WANG JIN,DONG JINGXIN,et al.A comparison of ZVPT estimation methods for inertial survey systems[J].Journal of Chinese Inertial Technology,1995,3(2):24-29.(in Chinese)
[12] 寇艳红,张其善,李先亮.车载GPS/DR组合导航系统的数据融合算法[J].北京航空航天大学学报,2003,23(3):264-268. KOU YANHONG,ZHANG QISHAN,LI XIANLIANG. Data fusion algorithm for vehicle gps/dr integrated navigation system[J].Journal of Beijing University of Aeronautics and Astronautics,2003,23(3):264-268.(in Chinese)
Vehicle Inertial Navigation System Attitude Correction Technology Based on Landmark Information
LI Rui-tao,XU Sheng-hong,CAO Wen-jing
(Department of Control Engineering,NAAU,Yantai Shangdong 264001,China)
The integrated system composed of inertial navigation system(INS)and speedometer is an independent positioning system commonly used on maneuver combat vehicles.The INS attitude accuracy will affect the integrated positioning accuracy directly.The INS attitude error estimation and correction technique based on landmark information was studied, and the function of landmark position and vehicle zero-speed information to the INS attitude correction was analyzed with simulation.Results showed that the method was an effective way to correct the vehicle INS attitude parameters with landmark information,and could improve the precision of the INS/speedometer integrated positioning system.
inertial navigation system(INS);integrated positioning;landmark;attitude error
TN966;U463.6
A
1673-1522(2014)04-0315-04
10.7682/j.issn.1673-1522.2014.04.004
2014-03-09;
2014-04-19
李瑞涛(1974-),男,副教授,硕士。
