一种信号自适应的控制器设计与实现
2014-07-11蹇安安
潘 婧,戴 晶,蹇安安
(武汉第二船舶设计研究所,武汉 430064)
0 引言
海洋运输有着悠久的历史,与国家的发展有着密不可分的关系。船舶运动控制从手动发展到了自动,一代又一代的船舶自动化产品不断问世[1]。船舶控制系统不断改进,各种新的问题不断出现,就船舶控制系统中部分信号衰减问题,本文给出了一种实用的、基于船舶控制系统的信号自适应控制器的设计与实现。

图1 船舶侧推系统信号自适应控制器应用示例
随着科学技术的发展,嵌入式控制器在船舶控制系统中有着越来越广泛的应用[2]。本系统所设计的信号自适应控制器,就是基于STC12C5A60S2芯片的嵌入式控制器,可对船舶控制系统中0-10V电压信号、-10V-10V电压信号以及4mA-20mA电流信号进行自适应校准,比例输出标准的4mA-20mA电流信号。
如图1所示,在该船舶侧推系统中,桨角发信器输出的4mA-20mA螺距信号,再由侧推机舱至驾驶室的过程中,产生信号衰减[3]。在接口板中使用信号自适应控制器,对衰减的4mA-20mA信号进行信号校准,实现衰减补偿。
1 系统设计
本系统以STC12C5A60S2单片机作为中央处理器进行数据运算,它是宏晶科技生产的单时钟(机器周期为IT)的一个单片机系列,是一个增强型的8051的MCU,指令代码完全兼容传统8051,但速度快8至12倍,并支持在线编程[4]。和传统8051相比,有以下特点。

图2 STC12C5A60S2结构
信号自适应控制器利用运放LM358以及相关模拟电路,实现信号的转换,将输入信号转换成单片机可进行模数转换的0-5V的电压信号;利用指令输入模块和状态指示模块,准确输入相关的校准的辅助数据;由中央处理器对相关数据进行处理运算,对单片机的相关参数进行设置;同时,结合4mA-20mA信号输出模块,利用运放LM358和三极管8050,实现4mA-20mA电流信号的输出;利用可控制的光电耦合器件TLP521[5]实现单片机5V输出控制24V继电器的输出。图3为信号自适应系统系统框图。

图3 信号自适应系统系统框图

图4 电源模块电路原理图
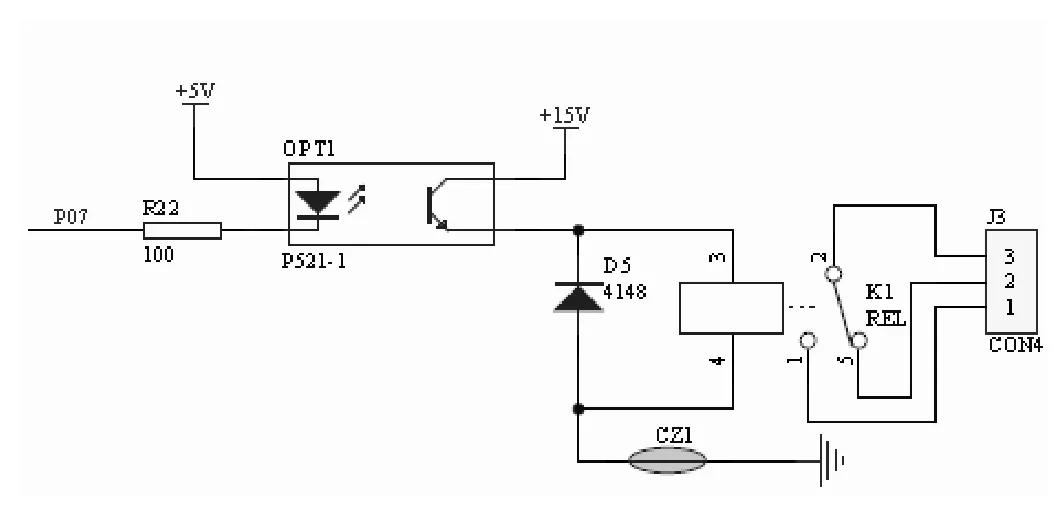
图5 继电器模块电路原理图
2 系统硬件设计
本系统的硬件设计主要包括电源模块、继电器模块和电压转电流模块等硬件电路的设计。根据设计的难点和重点,本文给出其中电源模块、继电器模块和电流输出模块的电路原理图。
3 系统软件设计
本系统软件的主程序流程图如图7所示,程序包括参数设置和电流校准两个主流程。参数设置主要是对电路的硬件参数进行精确的校准,并将相关参数保存至EEPROM的过程。电流校准主要实现输入信号的校准,根据EEPROM保存的相关参数和写入的对应设备的临界值,对输入信号值进行计算处理,设置输出PWM信号的占空比,实现电流信号的校准。
若输出电流4mA、12mA、20mA对应的PWM的占空比分别为P4、P12、P20,待校准输入信号最小值、中值、最大值的AD转换结果依次为Imin、Imid、Imax,输入信号为I,对应PWM输出占空比为P,则各变量之间存在如下关系:
当I ≤Imin时,
P= P4;

图6 电流输出模块电路原理图
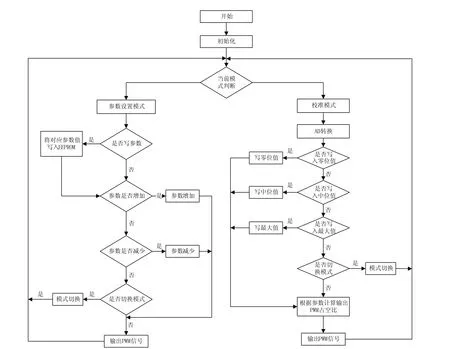
图7 信号自适应系统主程序流程图
当Imin<I≤Imid时,

当Imid<I<Imax时,

当I≥Imax时,
4 系统测试
系统测试输入为0-10V电压信号,输出等比例校准为4mA-20mA的电流信号,根据最小值、中位值、最大值的不同,分三组测试数据,测试数据如表1所示。图9(a)所示为第一组数据,输入信号最小值为1V,输入信号中位值为4.5V,输入信号最大值为9V。图9(b)所示为第二组数据,输入信号最小值为1.5V,输入信号中位值为5V,输入信号最大值为9V。图9(c)所示为第三组数据,输入信号最小值为1V,输入信号中位值为4.5V,输入信号最大值为8.5V。

图8 信号自适应控制器实物电路板

表1 测试数据表


图9 测试结果对比图
5 结束语
从信号自适应系统的测试结果可以得出:信号自适应系统实现了信号的校准,测试结果实际值与理论值基本一致,最大相差在0.1mA以内,误差值为±2%,在允许范围内。因此,我们认为基于船舶控制系统的信号自适应系统的设计基本完成,性能良好。
[1] 陆金金,杜佳璐,杨承恩.模型船的船舶运动控制系统设计[D].大连:大连海事大学,2010.
[2] 牛立佳,杨承恩.船舶模型控制器的设计[D].大连:大连海事大学,2007.
[3] 范斌,杨承恩.船舶操控模型的研制[D].大连:大连海事大学,2008.
[4] STC12CSA60SZ系列单片机器件手册[M/OL].http://www.meu-memory.eom/datasheet/ste/STC-AD-PDF/STC12CSA60S2.pdf,2013-3.
[5] TLP521中文资料[M/OL].http://wenku.baidu.eom/view/01ea88868762eaaedd33d467.html,2013-3.
[6] 任光,颜德文,牛井超,胡耀华,贾欣乐.船舶控制仿真系统[J].大连:大连海事大学学报,2002.
[7] 于风卫.基于参数自整定模糊PID的船舶控制[J].交通标准化,2006.11.
[8] 杨承恩,田园,毕英君.船舶舵阻摇技术的回顾与展望[J].世界海运,2002.4.
[9] 潘艳,骆立强,杨永强.船舶控制系统及设备电磁兼容性设计[J].船舶科学技术,2013.6.
[10] 杜刚,战兴群,张卫明.基于改进型径向基函数网络的船舶非线性航向自适应逆控制[J].上海交通大学学报,2006.
[11] 张松涛.模糊多模型船舶运动控制系统[D].大连海事大学:轮机工程,2006.
[12] 陈堂贤,汪德华,施保华,杜霞.基于Profibus-DP通信原理的船舶控制系统的研究[J].电气自动化,2003.6.
