基于定位信息的天线伺服系统的设计与实现*
2014-07-11邓江安
邓江安 金 晟 李 锐
(91550部队 大连 116023)
1 引言
本文所研制的天线伺服系统应用于对海微波通信系统中,对海微波通信系统由岸站和海上移动站组成。岸站天线为定向天线,由于定向天线的波束角与天线增益成反比,波束角越窄,天线增益越高,因海上微波传输特性的复杂性,为提高电平储备,对海微波传输系统的岸站天线通常采用波束角较窄的定向天线[1~2],因传统的利用信标机的天线伺服系统价格昂贵,未配备伺服,岸站天线对准海上移动站主要靠电平变化手动调节,存在调节不及时,调节不准的问题,严重影响了微波通信质量。随着当前北斗和GPS应用越来越普及,利用海上移动站定位信息实时计算岸站天线指向,以此为依据来控制天线指向,是一种简单可行的方法。
本文主要介绍了基于定位信息的天线伺服系统的构成,并重点介绍了中心控制台和天线控制器的具体实现。
2 系统结构
系统主要由中心控制台、天线控制器和天线转台三个部分组成,系统组成示意图如图1所示。

图1 系统组成示意图
中心控制台接收移动站定位信息,根据岸站天线位置计算出其应该指向角度,与从天线控制器获取的天线当前指向角度作对比,形成控制信息送往天线控制器,由控制器控制天线转台上的电机转动。天线控制器接收天线转台上旋转变压器传来的电信号,转换为角度数字值,回送给中心控制台,天线控制器同时通过继电器控制天线转台转动。
3 中心控制台的设计与实现
中心控制台硬件配置为一台计算机,通过串口控制天线控制器(多个串口可控制多台控制器)。中心控制台软件采用Visual C++6.0开发,电子海图采用MapX ActiveX控件来实现[3~4]。网络通信和串口通信采用多线程方式实现,保证信息传输的实时性。
中心控制台接收移动站定位信息及天线状态信息,在GIS海图上实时显示。当收到移动站位置信息后,计算岸站天线的指向,将控制信息送往天线控制器。天线指向角的计算涉及到已知两点的GPS位置,获取两点间连线与正北方向夹角的问题,算法如下:
1)通过两点大地坐标,计算两点间连线与正北方向夹角的算法[5~7]
算法中用到的坐标系有三种,分别是大地坐标系、测量坐标系和地心直角坐标系。大地坐标系是由大地经度、大地纬度和大地高构成的坐标系,系统所获取的移动站定位信息都是基于大地坐标系;测量坐标系也称站心地平坐标系,即以测站法线和子午线方向为依据建立的坐标系,天线指向角计算是在测量坐标系下进行的;地心直角坐标系是坐标原点位于地球质心,由X轴、Y轴和Z轴所组成的笛卡儿坐标系,Z轴与地球平均自转轴重合,X轴指向子午面与赤道面的焦点,Y轴方向与X轴和Z轴所组成的平面垂直,且指向为东,地心直角坐标系是大地坐标系向测量坐标系转换的中介。
根据岸站天线G1点大地坐标(Gj1Gw1Gh1)和海上移动站G2点大地坐标(Gj2Gw2Gh2),求G1点与G2点间连线与正北方向夹角。
首先进行大地坐标系向地心直角坐标系的转换,公式如下:
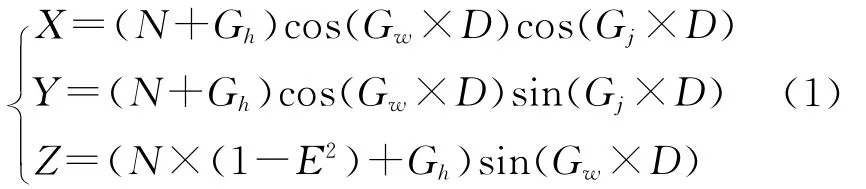
其中(GjGwGh)为大地坐标,(XYZ)为地心直角坐标,D=π/180为角度转换到弧度的常量,L1=6378140为地球长轴,L2=6356755为地球短轴,地球第一偏心率E=,中间量N=
将G1点和G2点大地坐标按上述方法转换为地心直角坐标。G1点地心直角坐标为(X1Y1Z1),G2点地心直角坐标为(X2Y2Z2)。
然后求G1点地心直角坐标系到测量坐标系的转换矩阵MG1。
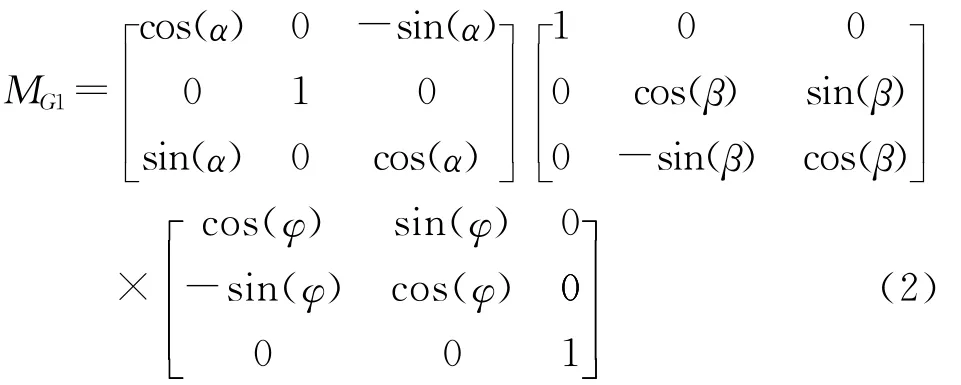
其中α为绕Y轴的旋转角度,值为-π/2;β为绕X轴的旋转角度,值为Gw1D;φ为绕Z轴的旋转角度,值为(Gj1-90)D。
接着求地心直角坐标系下G1点到G2点的方向向量
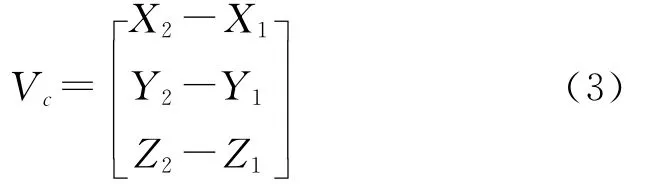
将方向向量Vc转换到测量坐标系下

最后获得与正北方向的夹角

2)中心控制台对天线转台的控制
中心控制台通过串口发送天线控制指令,控制天线转动,对天线转台的控制采用异步控制方式,每次发送控制指令后,不跟踪控制结果。程序采用定时方式,每隔250ms向天线控制器发送状态查询指令,接收到天线转台状态信息后,依据控制命令和天线控制器当前状态发送相应控制指令,发送指令后不管是否成功,待下次接收到状态信息后再重新进行控制操作。此种控制方式容错性好,每秒进行四次控制操作,当一次出现错误时,下次可重新进行控制操作,满足天线控制的实时性要求。
4 天线控制器设计
控制天线转动的转台控制设备由天线控制器、旋转变压器、执行电机及连接电缆组成。其中,天线控制器是控制核心,其原理框图及与其他部分的关系如图2所示。

图2 天线控制器原理框图
天线控制器主要包括微处理器(MCU)、轴角转换电路(RDC)、对外接口及功率驱动电路等。
1)微处理器
微处理器是整个单元的核心,选用ATMEL公司的AVR系列ATMEGA128单片机。AVR单片机是ATMEL公司推出的全新配置的精简指令集单片机。ATMEGA128内部配置有128K Flash、4KEEPROM、4KSRAM 等存储器及A/D、定时器、UART、SPI、WDT等丰富的外设,端口驱动能力达到20mA,工作电压范围宽,具有工业级的环境适应能力,完全满足系统功能需求[8]。
2)轴角转换电路
轴角转换电路选用“旋转变压器+RDC”方案。
旋转变压器是一种电磁式传感器,又称同步分解器。它是一种测量角度用的小型交流电动机,用来测量旋转物体的转轴角位移和角速度,由定子和转子组成。其中定子绕组作为变压器的原边,接受励磁电压,励磁频率通常用400Hz或1000Hz。转子绕组作为变压器的副边,通过电磁耦合得到感应电压。旋转变压器的工作原理和普通变压器基本相似,区别在于普通变压器的原边、副边绕组是相对固定的,所以输出电压和输入电压之比是常数,而旋转变压器的原边、副边绕组则随转子的角位移发生相对位置的改变,因而其输出电压的大小随转子角位移而发生变化,输出绕组的电压幅值与转子转角成正弦、余弦函数关系[9]。
旋转变压器(以下简称旋变)作为测角元件直接安装在转台轴上。当旋变的定子部分加有激磁信号时,其转子部分输出感应信号的幅度与天线轴角成正余弦关系。我们采用单极旋变,旋变提供两路输出。设激磁信号V=VmSin(ωt),转台转角为θ时,则规格化的旋变输出的两路信号为:KVmSinθSin(ωt)和KVmCosθSin(ωt)。将这些信号和振荡参考信号一起送到RDC芯片,RDC便可转换出角度θ。
RDC(Resolver-to-Digital Converter)芯片,是一种跟踪转换器,它实际上是一种Ⅱ型伺服环路,当KVmsinθsin(ωt)和KVmcosθsin(ωt)分别送入芯片的sin和cos输入引脚后,经过其内部运放再送至乘法器中,此时若内部可逆计数器输出的初始数字角φ也被送入乘法器,则经乘法器运算后得到的输 出 信 号 为Vsin(ωt)sinθcosφ和Vsin(ωt)cosθsinφ,二者再进行相减运算得到输出信号Vsin(ωt)sin(θ-φ),这个交流误差信号由相敏检测器利用参考信号sin(ωt)进行解调,产生一个正比于sin(θ-φ)的直流误差信号,该误差信号送给积分器,积分器输出驱动VCO,VCO输出脉冲给可逆计数器,直至sin(θ-φ)=0,此时θ-φ=0或θ=φ,数字输出角度代表角度θ。数字输出角度自动地跟踪输入,完全不需外部转换命令[10]。
轴角转换电路示意图见图3,激励源采用XR2206CP芯片,配合外围功放电路产生1KHz正弦波信号,送往安装在天线转台的旋转变压器。经过旋转变压器转换后的调制正弦波信号和调制余弦波信号通过放大电路后送往RDC芯片AD2S83AP,由RDC芯片转换为角度数字值。RDC芯片的数据接口与核心处理器的PORTC端口相连,RDC转换后的数据是16位,核心处理器先读取低8位,再读取高8位。
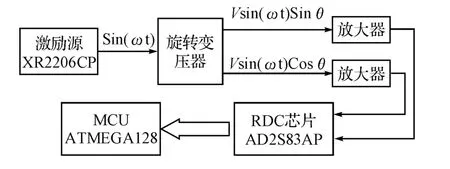
图3 轴角转换电路示意图
5 结语
文中详细介绍了基于定位信息的天线伺服系统设计及具体实现,该系统利用当前相当成熟的GPS定位技术,通过直接计算天线的指向来控制天线转动,方法简单而实用。通过加装本系统,岸站天线始终对准海上移动站,信号电平稳定,通信质量大大提高。此系统在实际应用中取得了良好的效果,具备了很好的工程应用价值。
[1]刘光辉,程芳.海上微波通信传输特性与衰落改善研究[J].舰船电子对抗,2011,34(2):47-50.
[2]林开泉,曹岳海,黄玉林.2.4GHz微波海上传播特性研究[J].舰船电子工程,2013,33(3):53-55.
[3]朱恩亮,王勇等,王光耀,等.基于MapX的电子海图显示系统开发[J].船海工程,2008,37(5):127-129.
[4]靳海亮,刘慧杰,苗保亮.基于 MapX控件的GIS应用软件基本功能二次开发[J].计算机与数字工程,2011,39(1):61-63.
[5]朱元彪,陈华.工程常用坐标转换方法研究与分析[J].测绘信息与工程,2012,37(2):35-37.
[6]李娜,于淼.GPS坐标向北京54坐标转换的方法[J].北方交通,2012(8):36-37.
[7]胡川.GPS平面坐标转换模型研究[J].科技广场,2009(11):43-44.
[8]丁化成,耿德根,李君凯.AVR单片机应用设计[M].北京:北京航空航天大学出版社.2002.2-4.
[9]徐建华,杨瑞峰.基于AD2S83的角位移测量模块设计[J].微计算机信息,2008,24(7):183-184.
[10]吕云峰,罗明西,何华强.基于RDC模块的角度测量仪的设计与实现[J].海军工程大学学报,2011,23(3):77-81.
