基于多新息随机梯度永磁同步电机参数辨识
2014-07-07徐鹏肖建周鹏李山
徐鹏,肖建,周鹏,李山
1.西南交通大学电气工程学院,成都 610031
2.重庆理工大学电子信息与自动化学院,重庆 400054
基于多新息随机梯度永磁同步电机参数辨识
徐鹏1,2,肖建1,周鹏2,李山2
1.西南交通大学电气工程学院,成都 610031
2.重庆理工大学电子信息与自动化学院,重庆 400054
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有响应快、高精度、高转矩比等诸多优点。在永磁同步电机系统数学模型基础上,构建系统回归模型,推导得永磁同步电机多新息随机梯度参数辨识算法(MISG),仿真和实时实验结果表明由于MISG算法重复利用可测输入输出信息,较单新息随机梯度算法(SG)有着更好的参数估计收敛性,并且随着新息长度p的增加及遗忘因子引入,MISG算法辨识效果与最小二乘(RLS)算法接近。
永磁同步电机;多新息;随机梯度;收敛性
1 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有体积小、结构简单、效率高等诸多优点,使得其在数控机床、医疗器械、航空航天等领域得到广泛应用。然而与其他交流电机一样,由于受噪声、温度和磁场等因素影响,永磁同步电动机是一个参数不确定、非线性、强耦合和多变量高阶复杂系统,为保证相关的控制算法有效运行,首先需要获得电机相关参数,目前常用的电机参数辨识方法主要有最小二乘法[1-7]、卡尔曼滤波法[8-11]、模型参考自适应法[12-15]以及人工神经网络法[16-19]。最小二乘法具有算法简单、易于实现等优点,因此被广泛应用于系统辨识中。然而,最小二乘算法中需要计算协方差矩阵,算法的计算量偏大。众所周知,随机梯度算法因其运算数据为标量,计算量较小,但收敛速度较慢,Ding和Chen基于多新息理论,引入新息长度,将单新息标量扩展为多新息向量,提出多新息随机梯度算法和多新息遗忘梯度算法辨识线性回归系统,分析了算法的收敛性[20];Liu等针对多输入单输出输出误差模型系统,提出基于辅助模型多新息随机梯度算法[21],Ding等对于输出误差滑动平均系统,分别提出了辅助模型多新息增广随机梯度算法[22];Wang和Ding等解决了辅助模型多新息增广随机梯度算法的收敛性证明问题[23];Zhang等将多新息辨识方法应用到离散时间系统的自校正控制问题[24]。
结合上述分析,在永磁同步电机系统数学模型基础上,构建该系统回归模型,同时结合多新息辨识理论推导得永磁同步电机多新息随机梯度参数辨识算法,分析MISG算法收敛特性优势,仿真和实时实验结果表明MISG算法对永磁同步电机系统的参数辨识一致收敛,同时由于重复利用可测输入输出新息其收敛效果优于单新息随机梯度算法(SG),并且随着新息长度p的增加及遗忘因子的作用,MISG算法辨识效果与最小二乘(RLS)算法接近,但后者因计算协方差矩阵计算量偏大。
2 多新息随机梯度算法
设系统为ARX模型:

其中{u(t)}和{y(t)}分别为系统的输入和输出序列,{v(t)}是均值为零,方差为σ2的随机白噪声序列(不可测),A(z)和B(z)为阶次na和nb的单位后移算子z-1多项式,其中
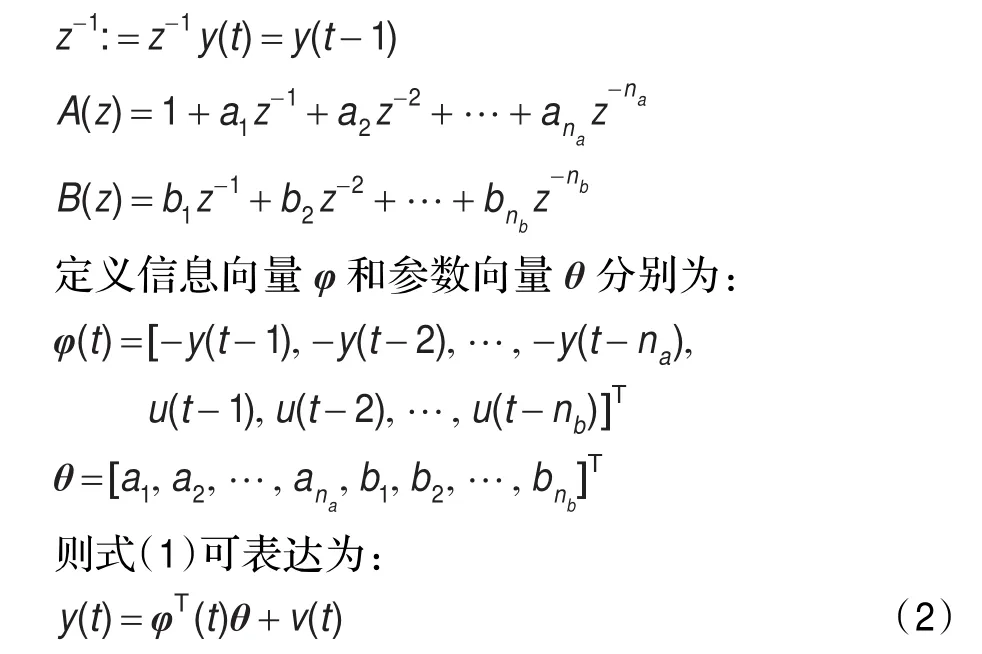
其中ai(i=1,2,…,na)和bi(i=1,2,…,nb)为待辨识的参数。
假定:当t≤0,u(t)=0,y(t)=0和v(t)=0。为研究方便,假定t为当前时刻,则y(t)和φ(t)称为当前的信息,{y(t-i),φ(t-i):i=1,2,…,p-1}称为过去的信息。
定义准则函数:

根据梯度搜索原理极小化J(θ)得到如下估计系统式(2)的参数θ的随机梯度(SG)算法:

其中对于SISO系统e(t)∈R1×1是单新息量,即当前时刻的标量新息。
SG算法仅用到当前时刻的信息,导致算法的收敛速度慢,参数精度不高。为了提高SG算法的收敛速度和估计精度,根据多新息辨识理论,充分利用可测量的输入输出信息,推导出多新息随机梯度算法。引入新息长度p,扩展单新息量e(t)为多新息向量:
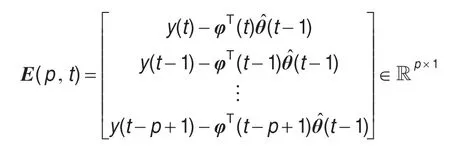
其中{y(t-i),φ(t-i):i=1,2,…,p-1}称为过去的信息,这里p为正整数。
定义信息向量Φ(p,t)和输出向量Y(p,t)如下:

则新息向量E(p,t)可表达为:

参照文献[20],得到如下估计系统式(2)参数θ的以新息长度为p的多新息随机梯度(MISG)算法:
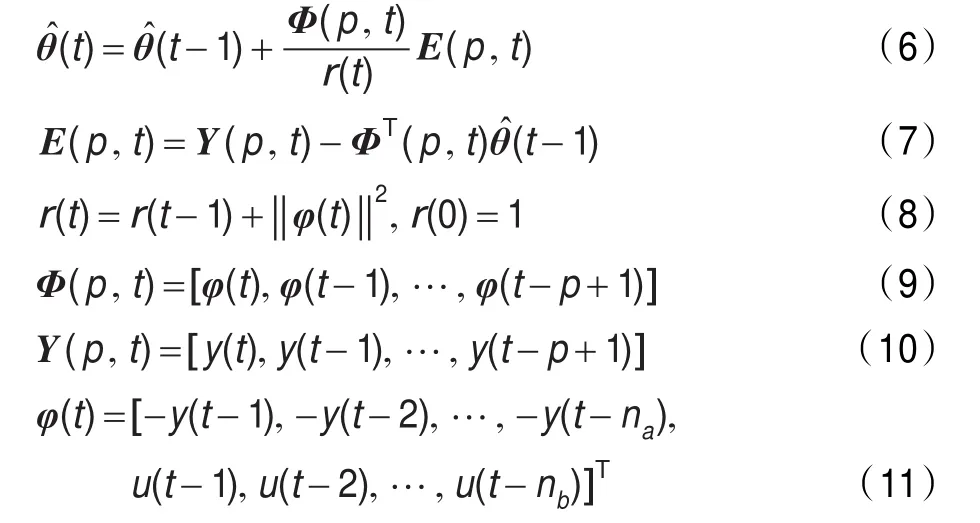
由于E(p,t)∈Rp×1为多新息向量,因此算法式(6)~(11)被称为多新息随机梯度(MISG)算法。当p=1时,MISG算法式(6)~(11)就变为SG算法式(3)~(5)。
MISG算法有如下收敛性质[20]:
(1)与SG算法式(3)~(5)比较,SG算法仅利用了当前时刻信息{y(t),φ(t)},MISG算法式(6)~(11)不仅利用了当前时刻的信息{y(t),φ(t)},还利用了过去时刻的可测信息{y(t-i),φ(t-i):i=1,2,…,p-1},因此MISG算法有更好的参数估计收敛特性。
(2)MISG算法重复利用可测的信息。例如,在t时刻,MISG算法用到了{y(t-i),φ(t-i):i=1,2,…,p-1},在t+1时刻,MISG算法用到{y(t-i),φ(t-i):i=1,2,…,p-1},因此,MISG算法可以提高参数估计的精度。
(3)随着新息长度p增大,MISG算法估计的效果越来越接近递推最小二乘(RLS)算法,与RLS算法比较,MISG算法不需要计算协方差矩阵,所以计算量较小。
多新息随机梯度算法收敛性证明可参考文献[25-28]中相关定理和结论。
3 永磁同步电机MISG参数辨识实验研究
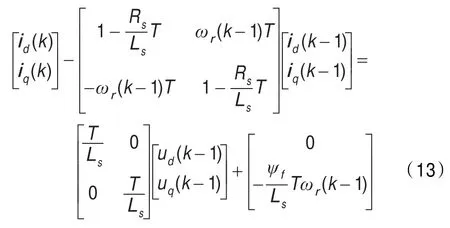
永磁同步电动机具有多变量、强耦合、非线性的性质,要获得良好的调速性能需在控制时实现对象的近似解耦。因此常采用转子磁链定向同步旋转坐标系(即d-q轴旋转坐标系)对永磁同步电动机性能进行分析研究。在建立永磁同步电机d-q轴数学模型前对电机本体及外界影响作出一些假设,永磁同步电动机在d-q轴旋转坐标系下的电压方程[29-30]:

方程中各量均为瞬态值,ud、uq为定子绕组的d-q轴电压;id、iq为定子绕组的d-q轴电流;ωr为电气角速度;Ld、Lq定子绕组的d-q轴电感;Rs为定子相电阻;ψf为永磁体产生的磁链;p为微分算子。
作为面装式永磁同步电机,Ld=Lq=Ls,从而结合公式(12),设定采样周期T,得永磁同步电机离散化后的差分方程形式:
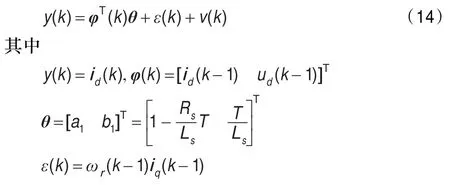
为简化问题分析,仅考虑d轴电流分量,考虑系统噪声干扰可得永磁同步电机回归模型公式(14),v(k)为零均值随机白噪声(不可测)。
3.1 仿真实验
结合公式(14)以及MISG算法式(6)~(11)在Matlab/ Simulink下进行仿真实验研究,其中永磁同步电机电磁参数见表1所示,采样周期为(1E-6)s,电机调速采用双闭环PI调节,转速设定为ω=100 rad/s,转速响应和d轴电流响应分别如图1和图2所示。

表1 永磁同步电机电磁参数
仿真时噪声序列{v(t)}采用零均值方差为σ2=0.12δ2=0.12的白噪声序列,分别用SG和MISG算法(公式(6)~(11),P=5,P=10)估计永磁同步电机模型参数θ,参数估计误差δ如图3所示,模型参数估计误差δ:= ||-θ||/||θ||为欧几里德范数计算参数估计误差。

图1 速度响应ωref=100 rad/s
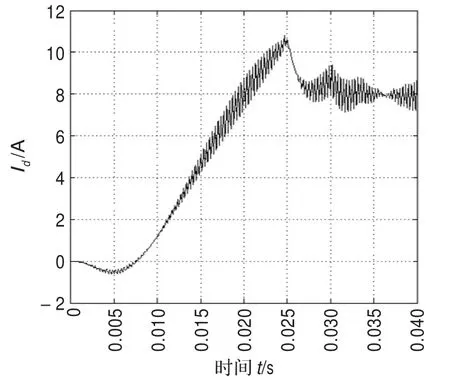
图2 d轴电流响应

图3 SG和MISG算法参数估计误差δ
由图3可以得知MISG算法的收敛特性远优于SG算法,并且随着新息长度p的增大收敛效果近一步优化。然而对于本仿真案例,当新息长度p=10时,有限仿真时间内的收敛效果仍然不太理想。
为加快MISG算法收敛速度,可在算法中加入遗忘因子,考虑在仿真实验引入遗忘因子,则将公式(8)变为:

加入遗忘因子后的随机梯度算法收敛特性的证明可参考文献[31]。设定遗忘因子λ=0.98,SG和MISG (p=2)参数估计误差如图4所示。从实验结果可得知加入遗忘因子后收敛快速性大幅度提高,同时MISG(p=2)算法因新息的引入,其收敛精度优于SG算法。当MISG算法新息长度p变为5时,实验结果如图5所示,其收敛精度和速度均优于SG算法。

图4 SG和MISG的估计误差δ(p=2,λ=0.98)
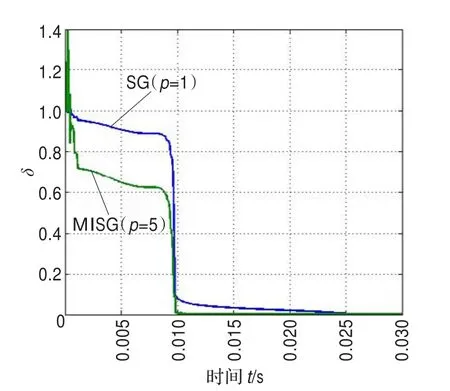
图5 SG和MISG的估计误差δ(p=5,λ=0.98)
在遗忘因子λ=0.98下MISG算法和最小二乘算法(RLS)参数估计误差δ对比如图6所示,结果表明MISG算法在新息长度p增大下,其收敛精度和RLS算法几乎一致,但其收敛速度还较不太理想。

图6 RLS和MISG的估计误差δ(λ=0.98)
因遗忘因子的大小直接影响随机梯度算法的收敛快速性,结合图6的结果,可进一步减小遗忘因子以提高算法收敛的快速性。设定λ=0.95和0.98,MISG(p=10)算法估计误差δ如图7所示,其结果印证了上述结论,但提高收敛快速的同时也降低了收敛过程的平稳性。
图7 MISG的估计误差δ(p=10,λ=0.95&0.98)
在λ=0.95下,MISG和RLS算法参数估计误差如图8所示,其结果表明在遗忘因子减小和新息长度p增大下,收敛效果越加接近RLS算法,但辨识过程前期参数估计误差δ震荡加剧。

图8 RLS和MISG的估计误差δ(λ=0.95)
3.2 实时实验
实时实验采用杭州天科教仪设备有限公司的DK31-2变频调速组件,如图9所示,该组件具有完整的控制和驱动系统,其控制器DSP芯片为TMS320F2812,永磁同步电机型号为DQ88,其额定电压为UN=220 V,额定功率PN=370 W,额定转速nN=1 500 r/min,额定电流IN= 1.2 A。

图9 DK31-2变频调速组件
实验中设定转速为-300 r/min,系统采样周期设定为1 ms,转速采用光电编码器获取。由于转速测量周期过小,编码器获得的转速信号波动剧烈,如图10所示,须对转速信号滤波处理,在对转速信号采用均值滤波后得转速值如图11所示。
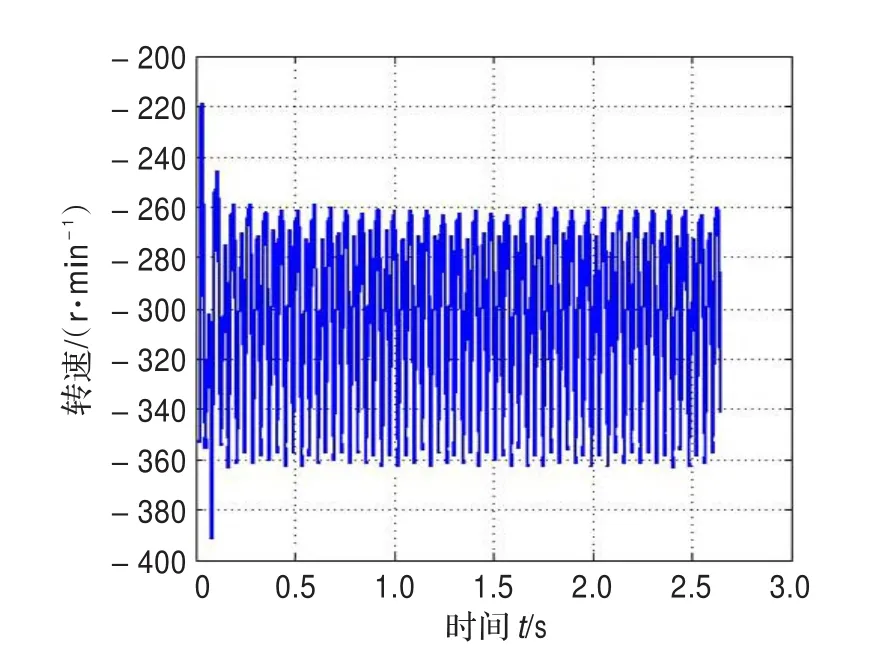
图10 未滤波的转速值
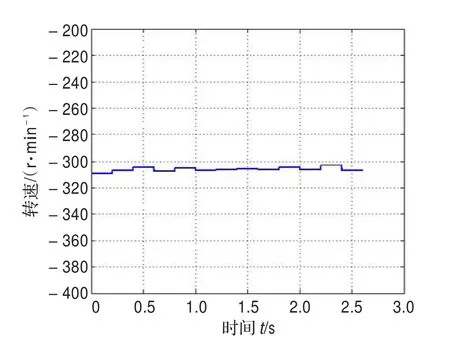
图11 均值滤波后的转速值
利用实时实验获取的电机运行时电流和电压相关数据,采用单新息随机梯度算法(SG)及多新息随机梯度算法(MISG)辨识永磁同步电机参数,其参数估计误差δ如图12所示,模型参数估计误差δ:=||-θ||/||θ||为欧几里德范数计算参数估计误差。
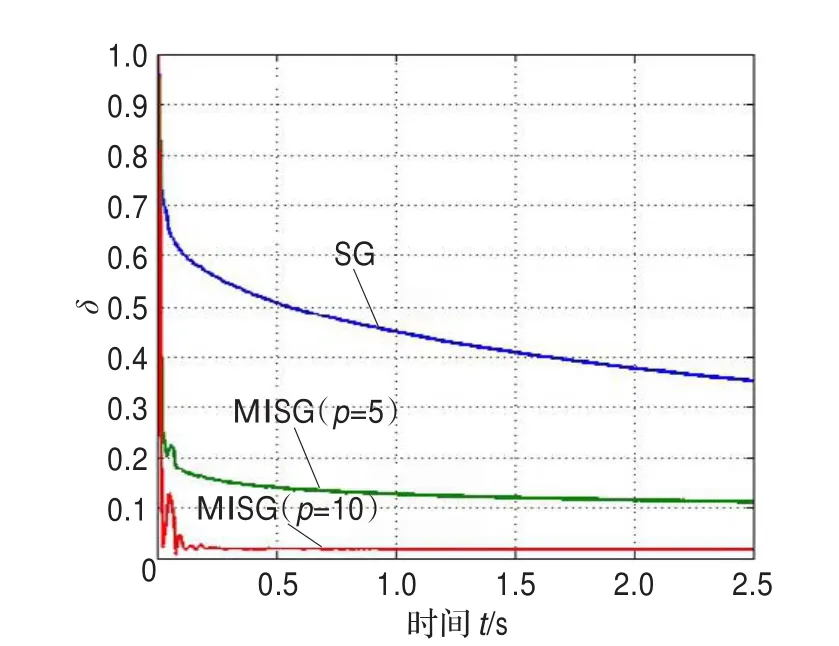
图12 实时实验MISG参数估计误差δ
由图12可以得知,多新息随机梯度算法随着新息长度p的增加,辨识算法收敛性能有很大程度的提高。对于MISG(p=10)和RLS算法辨识过程对比曲线如图13所示,由结果可知,随着新息长度p的增加,MISG算法收敛快速性优于RLS算法,其收敛精度基本一致,而RLS算法因计算协方差矩阵,其计算量偏大。
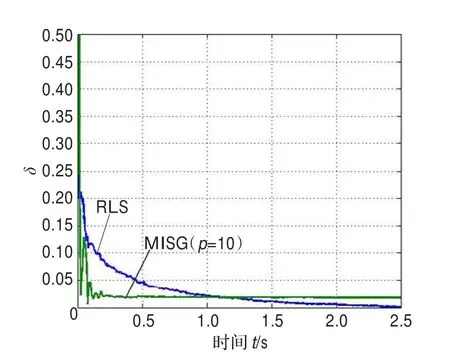
图13 实时实验MISG和RLS参数估计误差δ
4 结束语
在分析永磁同步电机模型基础上,结合多新息辨识理论,引入新息长度p,将单新息数据扩展为多新息向量,推导了永磁同步电机多信息随机梯度参数辨识算法。由于MISG算法可以充分利用输入输出信息,因而其参数估计收敛性能优于SG算法,通过仿真和实时实验得到验证,并随着新息长度p的增加及遗忘因子作用,MISG算法辨识效果与RLS算法接近,而后者需计算协方差矩阵,计算量偏大。
[1]杨静.伺服系统的参数辨识[D].西安:西安电子科技大学,2010.
[2]邵臣.混合动力汽车ISG永磁同步电机参数辨识方法研究[D].长春:吉林大学,2007.
[3]刘永钦.基于FPGA的永磁同步电机参数辨识的研究[D].无锡:江南大学,2008.
[4]Cao Xianqing,Fan Liping.Real-time PI controller based on pole assignment theory for permanent magnet synchronous motor[C]//Proceedings of the IEEE International Conference on Automation and Logistics,ICAL 2008,2008:211-215.
[5]Abjadi N R,Soltani J,Pahlavaninezhad M,et al.A nonlinear adaptive controller for speed sensorless PMSM taking the iron loss resistance into account[C]//Proceedings of the Eighth International Conference on Electrical Machines and Systems,2005:188-193.
[6]Khov M,Regnier J,Faucher J.Detection of turn short-circuit faults in stator of PMSM by on-line parameter estimation[C]//2008 International Symposium on Power Electronics,Electrical Drives,Automation and Motion,2008:161-166.
[7]Khov M,Regnier J,Faucher J.On-line parameter estimation of PMSM in open loop and closed loop[C]//Pro-ceedings of the IEEE International Conference on Industrial Technology,2009.
[8]王松,刘明光.基于卡尔曼滤波和神经网络的PMSM参数辨识[J].北京交通大学学报,2010,34(2):124-127.
[9]Jiang Baojun.A novel algorithm based on EKF to estimate rotor position and speed for sensorless PMSM drivers[C]// Proceedings-2009 International Conference on Information Engineering and Computer Science,2009.
[10]Wang Anbang,Wang Qunjing,Hu Cungang,et al.An EKF for PMSM sensorless control based on noise model identification using ant colony algorithm[C]//The 12th International Conference on Electrical Machines and Systems,2009.
[11]Yuan Xiaoling,Wang Honghua.Intelligent sensorless control of permanent magnet synchronous motor drive[C]// 2009 2nd International Conference on Intelligent Computing Technology and Automation,ICICTA 2009,2009:454-457.
[12]Senjyu T,Kuwae Y.Accurate parameter measurement for high speed permanent magnet synchronous motors[C]// 2001 IEEE 32nd Annual Power Electronics Specialists Conference,2001:772-777.
[13]Liu Li,Cartes D A.Synchronisation based adaptive parameteridentification for permanent magnet synchronousmotors[J].IET Control Theory&Applications,2007,1(4):1015-1022.
[14]Morimoto S,Hatanaka K.Servo drive system and control characteristics of salient pole permanent magnet synchronous motor[J].IEEE Transactions on Industry Applications,1993,29(2):338-343.
[15]Khatounian F,Moreau S.Parameters estimation of the actuator used in haptic interfaces:comparison of two identification methods[C]//2006 IEEE International Symposium on Industrial Electronics,2006:211-216.
[16]陆可,肖建,陈爽,等.基于强跟踪延迟滤波算法的互馈双电机联合状态估计[J].中国电机工程学报,2008,25(36):80-86.
[17]Simões M G,Bose B K.Neural network based estimation of feedback signals for a vector controlled induction motor drive[J].IEEE Transactions on Industry Applications,1995,31(3):620-629.
[18]Ben-Brahim L,Tadakuma S,Akdag A.Speed control of induction motor without rotational transducers[J].IEEE Transactions on Industry Applications,1999,35(4):844-850.
[19]Kim S H H,Park T S S.Speed-sensorless vector control of an induction motor using neural network speed estimation[J].IEEE Transactions on Industrial Electronics,2001,48(3):609-614.
[20]Ding Feng,Chen Tongwen.Performance analysis of multiinnovation gradient type identification methods[J].Automatica,2007,43(1):1-14.
[21]Liu Yanjun,Xiao Yongsong,Zhao Xueliang.Multi-innovation stochastic gradient algorithm for multiple-input single-output systems using the auxiliary model[J].Applied Mathematics and Computation,2009,215(4):1477-1483.
[22]Ding F,Liu P X,Liu G J.Auxiliary model based multiinnovation extended stochastic gradient parameter estimation with colored measurement noises[J].Signal Processing,2009,89(10).
[23]Wang Dongqing,Ding Feng.Performance analysis of the auxiliary models based multi-innovation stochastic gradient estimation algorithm for output error systems[J]. Digital Signal Processing,2010,20(3):750-762.
[24]Zhang J B,Ding F,Shi Y.Self-tuning control based on multi-innovation stochastic gradient parameter estimation[J]. Systems&Control Letters,2009,58(1):69-75.
[25]Goodwin G C,Sin K S.Adaptive filtering prediction and control[M].Englewood Cliffs,New Jersey:Prentice-hall,1984.
[26]谢新民,丁锋.自适应控制系统[M].北京:清华大学出版社,2002.
[27]韩丽丽.多率多输入系统的辨识[D].无锡:江南大学,2010.
[28]郭雷.时变随机系统——稳定性、估计与控制[M].长春:吉林科学技术出版社,1993.
[29]王磊,李宏,武明珠,等.基于扩展卡尔曼滤波的永磁同步电动机参数辨识[J].微特电机,2012,40(7):19-22.
[30]刘亢,刘忠途,李乐荣,等.永磁同步电机在线多参数辨识方法研究[J].微特电机,2012,40(6):4-7.
[31]陈晓明.基于梯度的双率采样数据系统辨识[D].无锡:江南大学,2008:12-14.
XU Peng1,2,XIAO Jian1,ZHOU Peng2,LI Shan2
1.School of Electrical Engineering,Southwest Jiaotong University,Chengdu 610031,China
2.School of Electronic and Automation,Chongqing University of Technology,Chongqing 400054,China
Permanent Magnet Synchronous Motor(PMSM)has some excellent features,such as fast response,better accuracy,high torque to current ratio.Based on analysis of PMSM mathematical model,the system regression model is proposed,and multi-innovation stochastic gradient algorithm for PMSM parameters identification is derived.Simulation and real-time experiments results show that MISG algorithm has more outstanding performance on parameter estimate convergence than SG algorithm because of reusing measurable output and input information.Meanwhile,with multi-innovation length increased and forgetting factor affected,convergence performance of MISG algorithm is close to RLS.
Permanent Magnet Synchronous Motor(PMSM);multi-innovation;stochastic gradient;convergence performance
A
O231.3
10.3778/j.issn.1002-8331.1310-0367
XU Peng,XIAO Jian,ZHOU Peng,et al.Multi-innovation stochastic gradient identification for permanent magnet synchronous motor.Computer Engineering and Applications,2014,50(6):255-260.
国家自然科学基金(No.51177137);重庆市科委自然科学基金(No.CSTC2012jjA40066);重庆市教委科学技术研究项目(No.KJ130807)。
徐鹏(1978—),男,博士生,讲师,研究领域为电气系统智能控制技术;肖建(1950—),男,博士,教授,研究领域为计算机控制技术;周鹏(1973—),男,讲师,研究领域为计算机控制技术。E-mail:xupeng5477@126.com
2013-10-28
2013-12-12
1002-8331(2014)06-0255-06
