数字式PID控制器的研究与设计
2014-07-01陈心怡吴志光
陈心怡, 吴志光
(1.陆军军官学院,合肥230000;2.池州职业技术学院,安徽池州247000)
数字式PID控制器的研究与设计
陈心怡1,2, 吴志光2
(1.陆军军官学院,合肥230000;2.池州职业技术学院,安徽池州247000)
模拟式PID控制器由于受到电子器件延迟性及非线性的限制,其瞬态特性及稳定性较差。文中研究了数字式PID控制器的工作原理,提出了基于单片机的数字式PID控制器的设计方案。该设计方案具有结构简单、实时性强、线性控制的特点。
数字式PID;控制算法;实时性强;线性控制
0 引言
传统的模拟式PID控制器由于受到电子器件电容性限制,其瞬态特性及稳定性已不能满足高速、高精度的控制要求,基于计算机的数字PID控制器具有响应快、控制精度高、成本低、线性控制等优势,已快速取代传统的模拟式PID控制器。数字PID控制器的控制性能主要取决于控制算法。本文主要是研究基于单片机的数字控制器的控制算法。
1 PID原理
PID是一个闭环控制算法,其控制系统是由PID控制器和被控对象组成的。其中PID控制器是包含了三个相互独立比例、积分和微分逻辑运算功能,当它们按照某种比重组合起来,将会获得响应快、精度高、稳定性好的控制效果。图1为常规PID控制系统结构图。
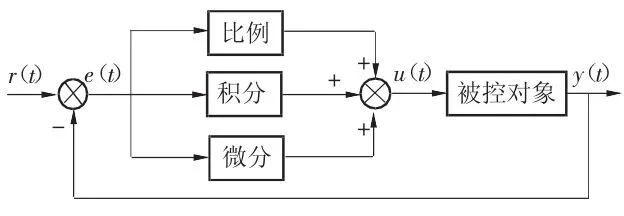
图1 PID控制系统结构
在连续控制系统中,PID控制器的输出y(t)与输入e(t)之间存在着比例、积分、微分的关系,如下式:

其中e(t)=r(t)-y(t),Kp为比例增益,Ti为积分时间常数,Td为微分时间常数,3个参数对控制系统的控制性能具有相互独立的作用,可以通过参数自整法获得一组组合,使得PID控制器获得快速、平稳、准确控制效果。
2 数字PID控制算法[3]
传统的模拟PID调节器是通过电阻、电容、电感、运算放大器等模拟电路来实现的。数字控制PID算法是在模拟PID算法的基础上,通过离散化处理得到的。设计算机的取样时间为T,以一系列取样时刻点nT代替连续时间T,以和式代替积分,以增量代替微分,即可得到数字PID的关系式

为采样序号,n=1,2,…;e(n)分别为第n次采样所得的偏差信号(设定值与反馈值得定值);u(n)为PID调节器第n时刻的输出值;e为位置式PID数字控制;Kp为比例系数,Ki=KpT/T1为积分常数,Kd=KpTd/T为微分常数。
为了获得较好控制效果,必须使Kp、Ki、Kd有一组恰当的值,这些数值通过参数自整法获得。
2.1 基于单片机数字PID控制器的硬件设计
数字PID控制器实际上是一个单片机控制器,结构框图如图2所示。
单片机是数字 PID控制器的主要部分,通过单片机运行参数自整程序获得合适的P、I、D的参数,达到较好的控制效果。
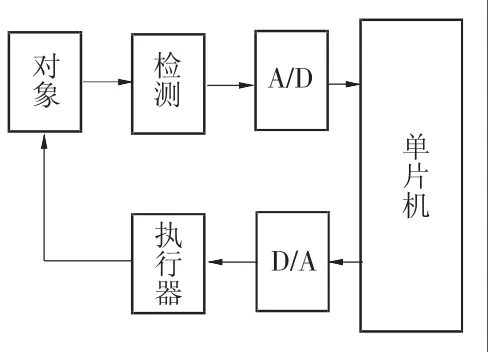
图2 数字PID控制器结构
2.2 PID控制器参数自整定算法的设计
参数自整定实质是在首次使用时,通过N次测量为新的工作对象寻找一套参数,并记忆下来作为以后工作的依据,其算法流程如图3。
2.3 基于单片机增量式PID控制器控制算法的设计
在数字PID控制器中,如何实现PID控制是关键。一般情况下,可应用增量式PID控制算法进行控制,系统结构如图4所示。
增量式PID控制算法表达如下[1]:
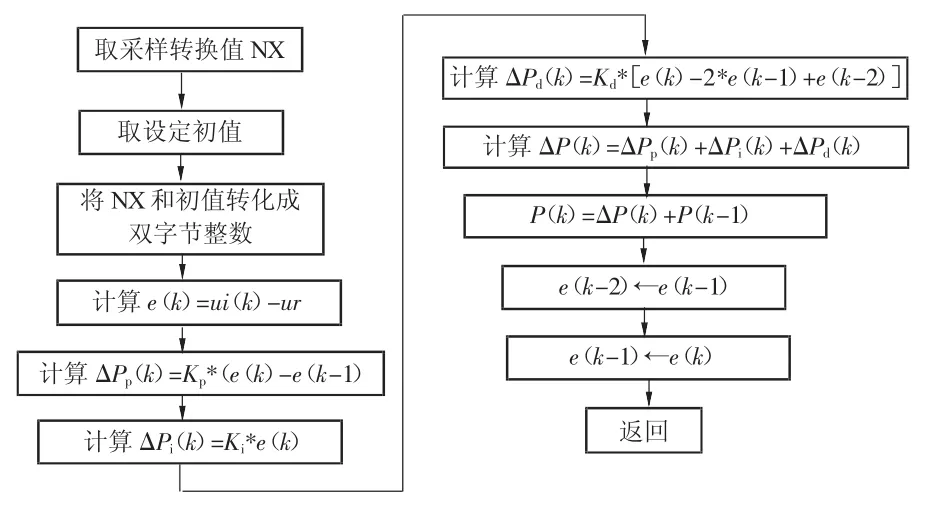
图3 参数自整定算法流程图
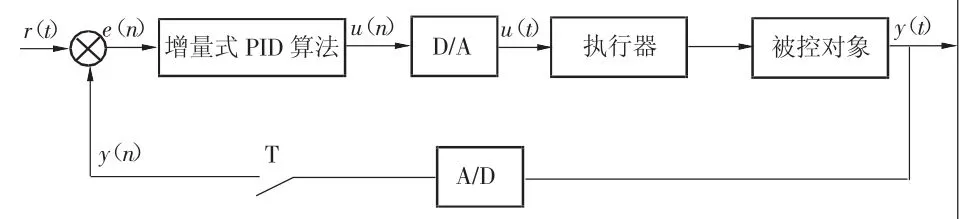
图4 增量式PID控制系统结构
式中:n为取样序号,取0,1,2,…;e(n)为第n次取样的偏差值;e(n-1)为第n-1次取样的偏差值;u(n)为PID控制器第n次输出值;Kp、Ki、Kd分别为比例、积分、微分系数;Δu(n)为第n次相对于第n-1次的控制量的增量。算法流程如图5所示。
3 结 语
基于单片机的数字式PID控制器是通过程序实现控制器的控制功能,不仅省去模拟控制器内部电子元器件,也有效克服了电子器件运算的延迟性和不稳定性,大大提高了PID控制器的响应度和控制精度,具有成本低、控制性能高的优点。
[1] 刘剑,陈建,邬连学.一种数字PID控制算法的分析[J].承德石油高等专科学校校报,2007(9):11-13,20.
[2] 何跃,林春梅.PID控制系统的参数选择研究及应用[J].计算机工程与设计,2006(22):1496-1498.
[3] 刘丹丹,吉建娇.PID调节器及其控制规律分析[J].科技创新导报,2009(22):81.
[4] 田亚娟.单片机原理及应用[M].2版.大连:大连理工大学出版社,2012.
(编辑立 明)
Research and Design of Digital PID Controller
CHEN Xinyi1,2, WU Zhiguang2
(1.Military Academy,Hefei 230000,China;2.Chizhou Vocational Technical College,Chizhou 230000,China)
Transient performance and stability of analog PID controller are poor because of the electronic device delay and nonlinear constraints.The working principle of the digital PID controller is studied.The design scheme of digital PID controller is put forward based on single chip microcomputer.The design has the characteristics of simple structure,strong real-time,linear control.
digital PID;control algorithm;real-time control;linear control
TM 571
A
1002-2333(2014)05-0122-02
陈心怡(1986—),男,助教,在读硕士,研究方向为机械设计与制造;吴志光(1979—),男,讲师,硕士,研究方向为数控技术与智能开发。
2014-03-21
