基于扩展卡尔曼滤波的车辆状态可靠估计
2014-06-28张为公
李 旭 宋 翔 张为公
(东南大学仪器科学与工程学院,南京210096)
车辆运行状态估计是汽车动力学中的重要问题,是实现汽车主动安全控制系统的关键技术之一.通过车辆运行状态估计能够确定汽车在行驶状态下的纵向前进速度、横摆角速度、侧向速度以及质心侧偏角等关键状态变量[1],从而控制这些参数以实现汽车主动安全控制.
这些状态变量可以用传感器直接测量或通过简单的数学推算获取,但直接测量必须依赖光电五轮仪或高精度GPS等价格昂贵的高精度传感器[2-3]才能保证其精度,成本高且需要特定的安装固定方式,难以大范围推广应用.以GPS直接测量为例,需利用单个GPS测量得到的航迹角,减去双天线GPS测量得到的车辆航向角来获得车辆滑移角,所需成本较高;而利用惯性、轮速传感器等低成本的车载传感器[4-6]所测量的运动学信号进行简单的积分等数学推算来间接获取车辆运行状态,虽然成本较低,却由于传感器精度较差且推算处理过于简单而存在着较大的测量误差,因而影响了控制效果.
近年来,为了兼顾成本和精度,车辆模型法引起了广泛的重视.该方法通过对汽车的运行过程进行动力学建模,同时将低成本的车载传感器信息作为观测信息,进而利用适当的滤波估计算法实现对汽车运行状态的估计.车辆模型法不仅可实现对难于直测量的估计,扩大状态估计的维数,还可提高有关直测量的精度,同时成本较低,国内外学者在该方面进行了许多研究[7-10].但已有的研究主要利用对整车或轮胎做了较多线性化假定的动力学模型[7-9],这些模型在车辆较平稳运行时能获得较好的估计效果和精度,但在需要频繁转向以及加减速的较高机动运行状况下由于难以反映车辆的实际非线性动力学行为导致估计精度较低.
针对汽车较高机动运行状况,本文提出了一种基于改进扩展卡尔曼滤波(EKF)的车辆运行状态估计方法.该方法利用非线性整车动力学模型和轮胎模型建立系统状态模型,同时利用低成本的车载轮速和方向盘转角传感器信息来建立滤波系统的外部输入量和观测量,进而通过改进的扩展卡尔曼滤波递推算法在较高机动环境下实现对车辆关键运行状态的准确、可靠估计.
1 车辆与轮胎模型
车速估计通常使用二自由度线性车辆模型,该模型中车辆的纵向前进速度被认为是定常数,只适合纵向速度不变或变化缓慢的运行情况,而实际道路车辆行驶中存在着较为频繁的加减速和转向,因而线性模型存在较大的建模误差.本文采用三自由度的汽车非线性动力学模型,忽略左右轮差异后模型可等效简化为相当于前、后车轮被分别集中在汽车前、后轴中点而构成的一个Bicycle模型,如图1所示.该模型包括纵向运动、侧向运动以及横摆转动3个自由度,对车辆的纵向前进速度无定常数的限定,故既可适应一般机动环境也可适应较高机动环境下车辆运行状态的准确估计.
据牛顿力学,车辆的动力学模型[11]可描述为
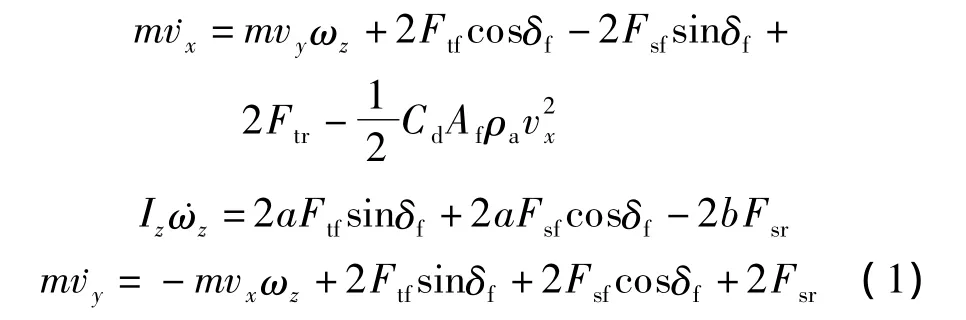
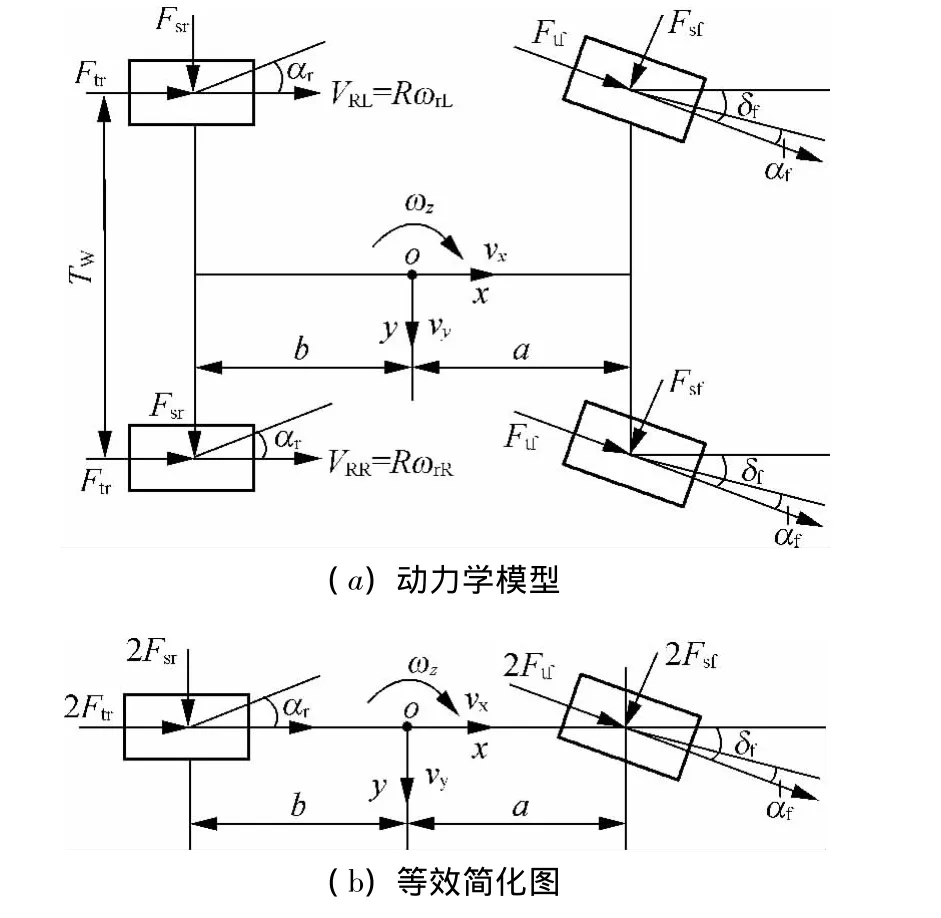
图1 车辆动力学模型
式中,vx,vy,ωz分别为汽车的纵向前进速度、侧向速度和横摆角速度;m和Iz分别为车辆的质量和绕oz轴的转动惯量;a,b分别为汽车前轮和后轮轮轴中心到质心的距离;δf为前轮转向角,由方向盘转角传感器测得的方向盘转角δ除以从方向盘到前轮的转向传动比来确定;Cd为空气阻力系数;Af为车辆前向面积;ρa为空气密度;Ftf,Ftr分别为作用在单个前轮和后轮上的纵向力;Fsf,Fsr为作用在单个前轮和后轮上的侧向力.对于行驶在一般道路交通环境下的车辆,通常可将作用在各轮上的侧向力表示为

式中,Cαf,Cαr分别为前、后轮胎的侧偏刚度;αf,αr分别为前、后轮胎的侧偏角,可表示为

将式(2)、(3)代入式(1),并考虑到δf通常是小角度(即 sinδf≈ δf,cosδf≈ 1,且忽略二阶及以上的高阶微量,经整理后可得
考虑到车辆运行的高机动特征,线性轮胎模型难以准确描述较高机动运行状况下轮胎的非线性特征,故轮胎纵向力Ftf和Ftr采用非线性轮胎模型来确定.魔术公式轮胎模型是公认的拟合精度最高的经验轮胎模型,但它是由三角函数组合而成的复杂的非线性函数,且模型中未知因子较多,计算量较大,不适合实时使用.同时考虑非线性运行工况和计算效率的要求,本文纵向力的估计采用便于实时计算的非线性Dugoff轮胎模型[12],即 Ftf和 Ftr通过下式来确定:

式中,Ctf和Ctr为单个前、后轮胎的纵向刚度;isf和isr为前、后轮胎的车辆纵向滑移率;pf,pr与ft由下式确定:

式中,μ为轮胎和地面间的附着系数;εr为道路附着衰减因子.Fzf和Fzr表示分配到前、后轮轴上的垂向载荷,可按下式确定:

式中,g表示重力加速度.
2 卡尔曼滤波模型的建立与线性化
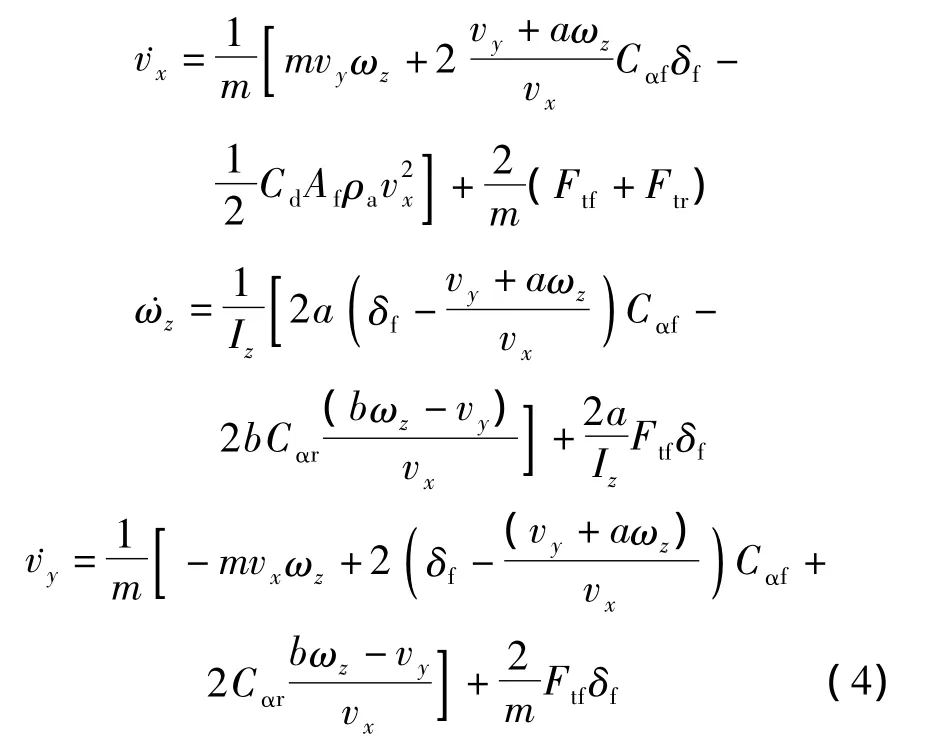
取状态变量 X={vx,ωz,vy}T,系统外输入向量为 U={δf,Ftf,Ftr}T,并以轮速传感器所输出的信息推算所得的包含较大噪声的车辆纵向前进速度vx_m和横摆角速度ωz_m作为系统观测量,即Z={vx_m,ωz_m}T,则根据式(4)可建立系统方程和观测方程,对其按采样时间离散化后得

式中,W与V为互不相关的零均值的系统高斯白噪声向量和观测白噪声向量,其协方差矩阵分别为Q与R;γ为系统外输入对应的零均值高斯白噪声向量,其协方差矩阵为Γ(k-1);f为状态转移函数,由(4)式确定为测量矩阵.系统观测量利用后轮轴上2个轮速传感器测得的角速度乘以轮胎半径得到左后轮和右后轮的车轮线速度VRL和VRR.从运动学角度,图1所示的车辆运动实际上是一个平面复合运动(纵向运动、侧向运动和横摆转动的复合),由平面复合运动关系可得

式中,TW为后轮轴上2个后轮间的轮距.对式(10)重新整理,则可以获取系统观测量:

3 改进卡尔曼滤波递推
对于式(9)所描述的系统状态方程和测量方程,可运用卡尔曼滤波理论建立滤波递推估计过程.由于状态方程为非线性方程,在应用卡尔曼滤波计算时,需先进行线性化处理,将系统方程在附近按泰勒级数展开(为X的滤波计算值),保留一阶微量、忽略高阶微量后再进行滤波递推计算,即需按照扩展卡尔曼滤波过程进行滤波递推.具体过程如下.
1)时间更新
状态一步预测方程为

一步预测误差方差阵为

式中,A为f对X求偏导的雅可比矩阵;B为f对U求偏导的雅可比矩阵.矩阵A和B的第i行第j列元素 ai,j和 bi,j(i=1,2,3;j=1,2,3)可通过下面的求导过程获得:

2)测量更新
滤波增益矩阵为

状态估计为

估计误差方差阵为

由于上述扩展卡尔曼滤波递推过程在测量更新过程中(即计算K(k))存在矩阵求逆运算,计算量大且容易造成数值计算的不稳定.因此,本文在测量更新时不直接采用矩阵求逆的方法,而采用标量化处理方法[13].即时间更新过程可按照上述滤波过程进行,而测量更新按以下改进的递推算法进行:令,由于观测向量维数为2,故将和R(k)阵分成2块,即
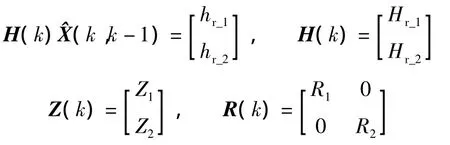
对于i从1到2,进行2次递推计算,即
在上述滤波递推计算过程中,可确定汽车在每个时刻的汽车纵向前进速度vx(k)、横摆角速度ωz(k)和侧向速度vy(k),进而根据下式可确定每个时刻的质心侧偏角:

4 仿真验证与分析
为检验本文提出的基于改进扩展卡尔曼滤波的车辆运行状态估计方法的实际效果,在汽车动力学仿真软件CarSim上进行了仿真验证实验.
为检验本文方法在较高机动环境下的估计效果,仿真实验中设置汽车的方向盘转角δ按幅值60°的正弦规律变化,同时汽车的纵向前进速度也在不断地做加速、制动减速和匀速等变化,方向盘转角和纵向前进速度随时间的具体变化过程如图2所示,仿真时长设置为100 s.实验车辆是一个前轮转向的四轮车,主要参数如下:m=960 kg,Iz=1 382 kg·m2,a=0.948 m,b=1.422 m,Cαf=Cαr=25.692 kN/rad,Tw=1.390 m.设定 4 个车轮的线速度的测量噪声均为均值是0、标准差是0.04 m/s的高斯白噪声,方向盘转角传感器的测量噪声为均值是0、标准差是8.73×10-2rad的高斯白噪声.卡尔曼滤波的系统零均值高斯白噪声的标准差分别为 0.05 m/s,0.02 rad/s,0.05 m/s;3 个外输入的零均值高斯白噪声的标准差分别为8.73×10-3rad,20 N,20 N;2 个观测量的零均值高斯白噪声的标准差分别为0.08 m/s和0.12 rad/s.
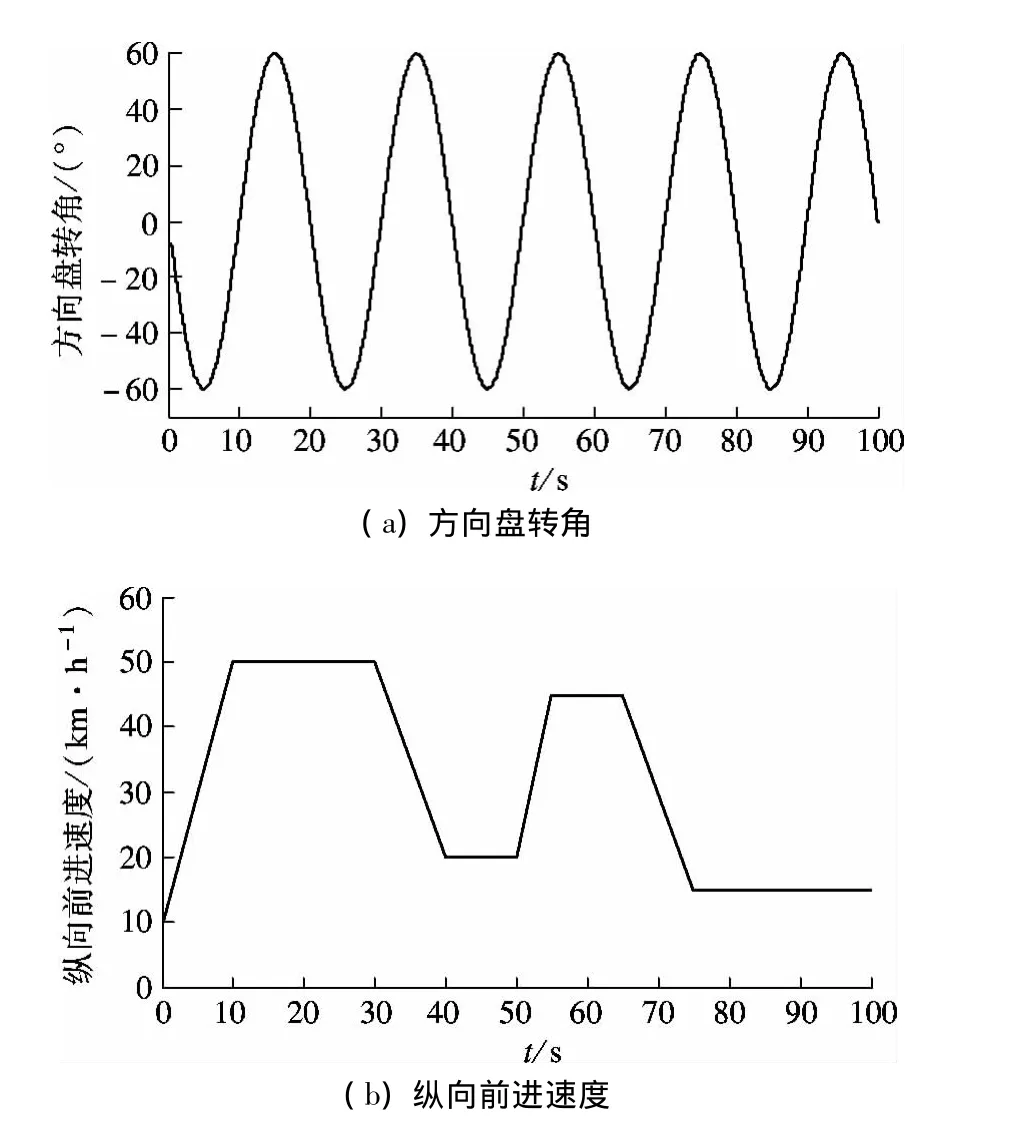
图2 车辆方向盘转角及纵向前进速度的仿真设置
表1列出了对于整个过程利用直接推算法和本文所提出方法推算车辆运行状态的统计结果对比.直接推算法是指通过轮速传感器直接测量换算得到的纵向前进速度和横摆角速度.图3(a)给出了本文方法估计的质心侧偏角β的结果曲线以及相应的Carsim的参考输出值,图3(b)给出了本文方法估计的β相对于Carsim输出的β参考值的误差曲线.
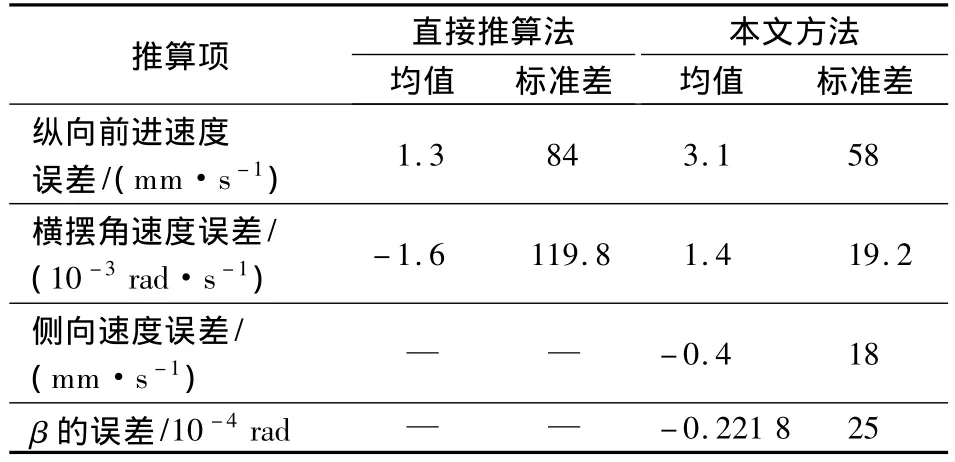
表1 2种方法推算效果的对比
由表1和图3可看出,本文方法相对于直接推算法在纵向前进速度和横摆角速度的推算精度方面有大幅的提高.同时,在难以直测的侧向速度和质心侧偏角的估计方面,本文方法也具有很高的精度.因此,即使在较高机动运行环境下,本文提出的基于改进扩展卡尔曼滤波的车辆运行状态估计方法也能够准确地估计出车辆纵向前进速度、侧向速度、横摆角速度以及质心侧偏角等信息,这些信息可满足有关汽车主动安全控制的需要.
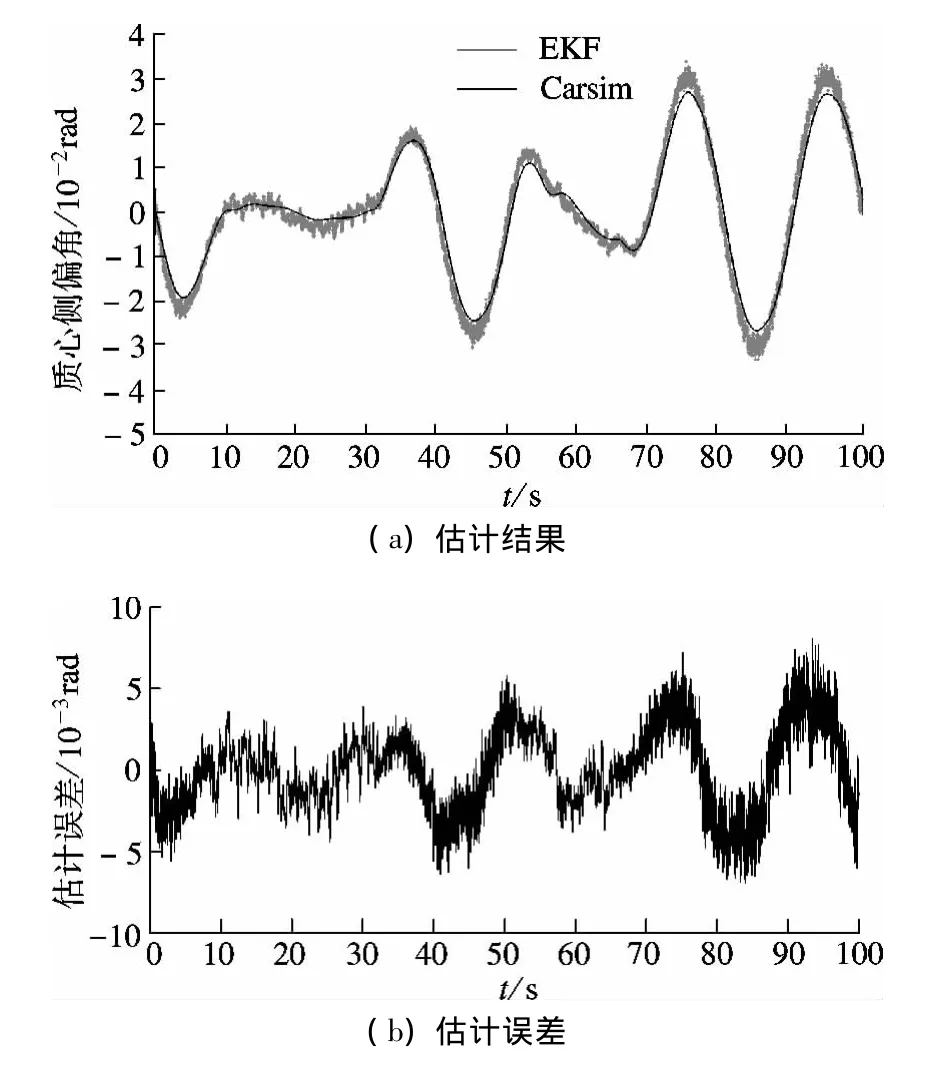
图3 质心侧偏角估计结果及误差
5 结语
本文研究了基于扩展卡尔曼滤波的车辆状态估计方法.首先在非线性的整车动力学模型和轮胎纵向力模型的基础上,建立了汽车运行过程的系统模型.然后,根据卡尔曼滤波理论,以低成本的车载轮速传感器信息作为系统观测量,通过改进的卡尔曼滤波递推算法高精度地推算出汽车前进速度、侧向速度、横摆角速度以及质心侧偏角等车辆关键运行状态.仿真试验证明,该方法不仅可显著提高汽车纵向前进速度和横摆角速度等直测量的精度,而且可实现对质心侧偏角、侧向速度等难于直测量的准确估计.在今后的研究中,对于轮胎处于高度饱和的非线性区域时的滑移角准确估计还有待深入.
References)
[1]余卓平,高晓杰.车辆行驶过程中的状态估计问题综述[J].机械工程学报,2009,45(5):20-33.Yu Zhuoping,Gao Xiaojie.Review of vehicle state estimation problem under driving situation[J].Journal of Mechanical Engineering,2009,45(5):20-33.
[2]Leung K T,Whildborne J F,Purdy D,et al.A review of ground vehicle dynamic state estimations utilising GPS/INS [J].Vehicle Syst Dyn,2011,49(1/2):29-58.
[3]Bevly D M,Ryu J H,Gerdes J C.Integrating INS sensors with GPS measurements for continuous estimation of vehicle sideslip,roll,and tire cornering stiffness[J].IEEE Trans Intell Transport Syst,2006,7(4):483-493.
[4]Chumsamutr R,Fujioka T,Abe M.Sensitivity analysis of side-slip angle observer based on a tire model[J].Vehicle Syst Dyn,2006,44(7):513-527.
[5]Rajamani R,Grogg J A,Lew J Y.Development and experimental evaluation of a slip angle estimator for vehicle stability control[J].IEEE Trans Control Syst Technol,2009,17(1):78-88.
[6]Chen B C,Hsieh F C.Sideslip angle estimation using extended Kalman filter[J].Vehicle Syst Dyn,2008,46(1):353-364.
[7]Baffet G,Charara A,Lechner D.Estimation of vehicle sideslip,tire force and wheel cornering stiffness[J].Control Eng Pract,2009,17(11):1255-1264.
[8]Tuononen A J.Vehicle lateral state estimation based on measured tyre forces[J].Sensors,2009,9(11):8761-8775.
[9]林棻,赵又群.汽车侧偏角估计方法比较[J].南京理工大学学报:自然科学版,2009,30(1):122-126.Lin Fen,Zhao Youqun.Comparison of methods for estimating vehicle side slip angle[J].Journal of Nanjing University of Science and Technology:Natural Science,2009,30(1):122-126.
[10]Zong C F,Hu D,Zheng H Y.Dual extended Kalman filter for combined estimation of vehicle state and road friction[J].Chinese Journal of Mechanical Engineering,2013,26(2):313-324.
[11]Smith D E,Starkey J M.Effects of model complexity on the performance of automated vehicle steering controllers:model development,validation and comparison[J].Vehicle Syst Dyn,1995,24(2):163-181.
[12]Li L,Wang F Y,Zhou Q Z.Integrated longitudinal and lateral tire/road friction modeling and monitoring for vehicle motion control[J].IEEE Trans Intelli Transport Syst,2006,7(1):1-19.
[13]Farrell J A,Givargis T D,Barth M J.Real-time differential carrier phase GPS-aided INS[J].IEEE Trans Control Syst Technol,2000,8(4):709-720.
