船用推进变频器矢量控制的研究
2014-06-27康乐李帆刘忠举
康乐, 李帆, 刘忠举
(武汉船用电力推进装置研究所,武汉 430064)
船用推进变频器矢量控制的研究
康乐, 李帆, 刘忠举
(武汉船用电力推进装置研究所,武汉 430064)
本文对船用推进变频器矢量控制的原理进行了分析,给出了以数字信号处理器为核心的异步电机矢量控制系统的设计方法及软硬件的实现,同时还对空间矢量脉宽调制方式进行了理论分析。仿真和实验结果证明其有效性。
矢量控制 数字信号处理器 空间矢量脉宽调制
0 引言
船舶采用异步电机调速系统作为推进动力已有近百年历史,随着发电系统和变频调速技术的日益成熟,使得交流调速技术已逐步应用到各种船舶推进系统及近海设备中。以高功率密度电机、新型电力电子装置、吊舱技术等高新技术为核心的全新驱动设计大大提高了舰船的可靠性和使用周期,并呈现出低成本、低维护费用等趋势,已成为21世纪海洋船舶技术装备的重要发展方向[1]。
产生于20世纪70年代的矢量控制理论是一种高性能的交流电机控制技术,后被应用于各种电机的控制中。脉冲宽度调制作为电力电子逆变技术中的关键技术,常用的方法有基于三角波与正弦波比较的电压脉宽调制(sinusoidal pulse width modulation,SPWM)以及将三相系统作为一个整体考虑的空间矢量脉宽调制(space vector pulse width modulation,SVPWM)[2]。
1 矢量控制原理及空间矢量脉宽调制
1.1 矢量控制原理
设电动机的电流为对称的三相正弦波电流,忽略电机铁心的饱和,不计电机中的涡流和磁滞损耗。由此得到异步电机的数学模型为
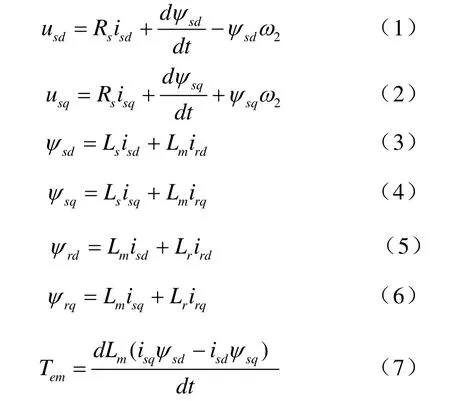
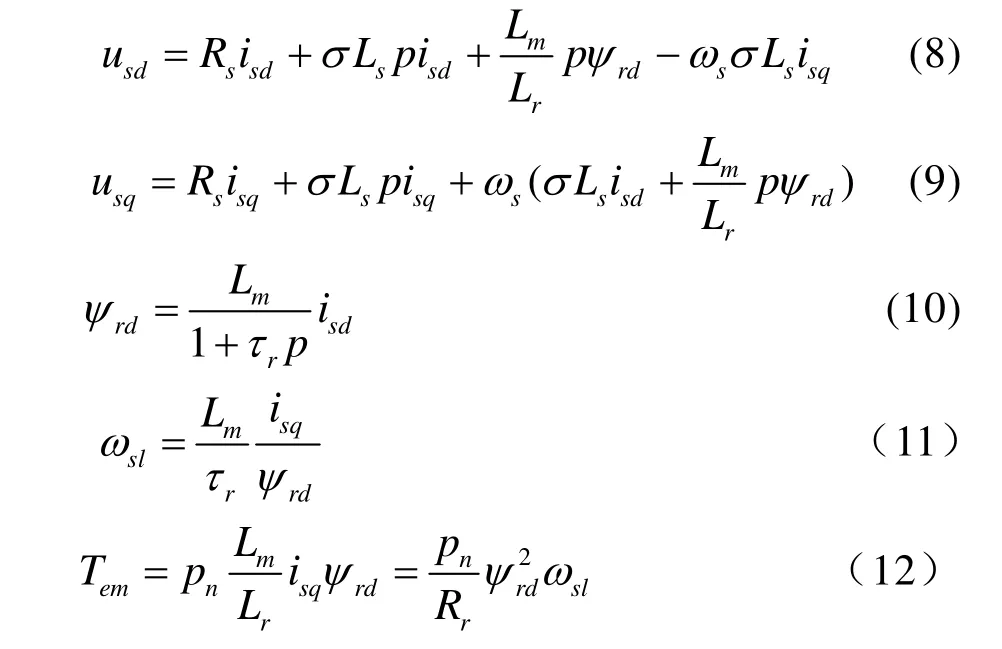
在磁场定向矢量控制系统中,一般把d-q坐标系放在同步旋转磁场上,把静止坐标系中的各交流量转换为旋转坐标系中的直流量,并使d轴与转子磁场方向重合,此时转子磁通q轴分量为零。省去推导过程,得到转子磁通定向矢量控制方程式:
1.2 空间矢量调制方式
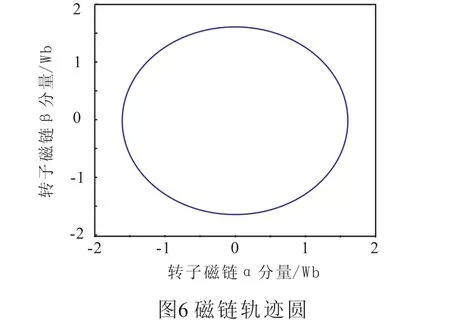
经典的SPWM控制主要着眼于使逆变器输出电压尽量接近正弦波,也就是希望输出的PWM电压波形的基波成分尽量大,谐波成分尽量小,然而交流电机需要输入三相正弦电流的目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。SVPWM控制方法将逆变器和被控交流电机视为一个整体,从电机的角度出发,是电机产生圆形旋转磁场。由于磁链的轨迹是靠不同的电压空间矢量相加得到的,而不同的电压空间矢量对应于不同的变频器开关模式,所以通过选择变频器的不同开关模式,使电机的实际磁链尽可能接近理想磁链圆[2]。
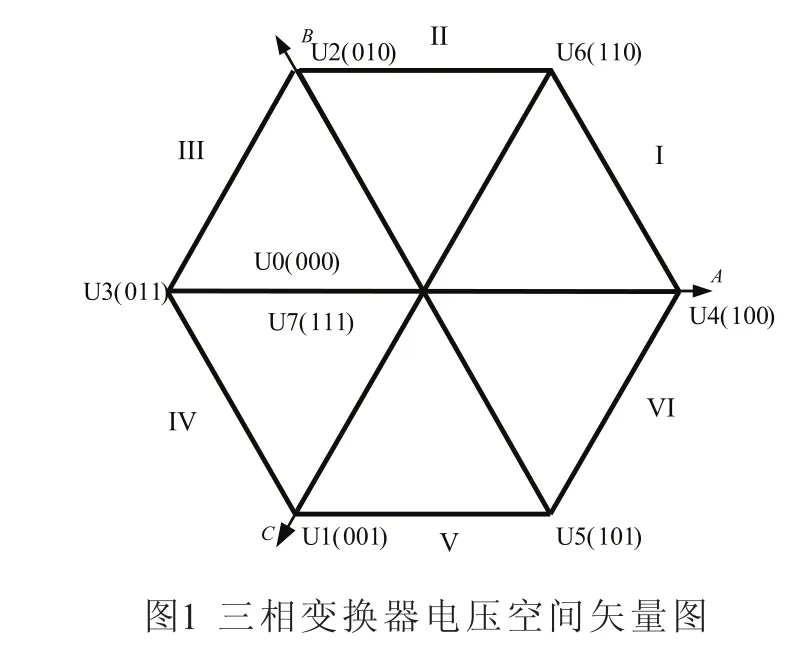
三相电压型变换器输出的合成电压空间矢量表达式如下式(13)所示:

三相电压型变换器中6个开关管有8种允许的开关组合,假设开关管导通用“1”表示,关断用“0”表示,并依a,b,c相序排列。则这8种工作状态可相应表示为U1(000),U2(010),U3(011),U4(100),U5(101),U6(110),U7(111)与U0(000)。根据电机模型,这8种状态可以用图1所示矢量关系表示,U1-U6是6个非零矢量,U0,U7是2个位于原点的零矢量。SVPWM的目的就是通过控制这6个开关器件的8中工作状态来是实现任意时刻电机工作所需的电压矢量Us[4].
2 变频器矢量控制的硬件实现
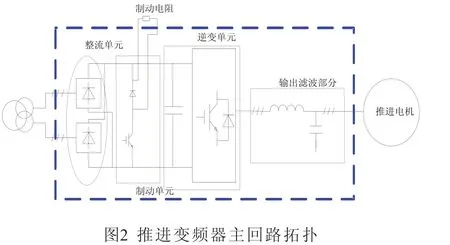
推进变频器采用主回路为电压型的“交-直-交”变频结构,如图2所示,主要由12脉波整流电路、逆变电路、输出滤波电路、软启动电路及能耗制动电路组成。控制电路以DSP为核心,采用电压空间矢量算法生成PWM波形。检测电路包括电流检测单元、直流电压检测单元和转速检测单元,DSP控制电机转速采样并计算电机转速和位置,最后运用矢量算法得到电压空间矢量脉宽调制的信号,输出PWM波形,经过光耦隔离驱动保护电路输送给逆变器的功率开关器件驱动异步电机[5]。
为实现以上功能,推进变频器硬件回路主要有电源板、CPU板(DSP处理器)、调理板、IO板和光纤板组成。电源板将电源板将外部输入的+24 VDC经DC/DC变换为各电路板所需的+15 VDC、-15 VDC、+5 VDC电源。CPU板是控制硬件的核心部分,由DSP(TMS320F2812)、CPLD以及一些外围扩展电路组成。可实现矢量控制和直接转矩控制等复杂的控制算法运算、生成PWM信号、信号采集、系统保护、电机位置及速度检测、与上位机通讯等功能。信号调理板完成电压、电流信号的检测、故障判断及报警功能,将调理后的数送至CPU板的外部ADC进行采样,并通过总线将故障信息传送至CPU板。IO板通过总线与CPU板连接,完成开关量状态的检测及输出断路器的控制,同时实现增量式编码器的转速测量。光纤驱动板主要实现PWM驱动信号的光电转换、开关器件反馈信号的检测与判断等功能。
3 变频器矢量控制的软件实现
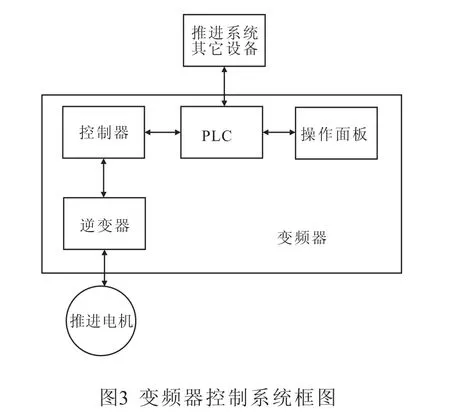
推进变频器矢量控制的软件系统控制基于前文所述的硬件平台,其主要功能为实现电机的调速控制,并同时实现监测、保护、控制、事故分析、事件记录、调试与软件升级等。控制软件由DSP软件,PLC软件,面板操作软件组成。控制系统结构框图如图3所示。
3.1 DSP控制软件
DSP控制软件是电机矢量控制的核心算法。DSP控制单元软件主要完成控制指令的接收,控制对象参数以及控制软件的调节参数的接收,根据接收到的给定转速或者给定功率,相应的选择转速控制模式或者功率控制模式,采样实际转速与输出电流,经过电机矢量控制,实现三相逆变桥臂的PWM输出,达到电机转速或者功率的精确控制;并传送变频器的运行参数(电压,电流,实际转速,功率,功率因数等)与变频器发生故障时的故障信息到集控台显示,通过通讯采集柜体控制单元信息做集中协调控制处理。DSP控制系统主要有以下几个基本环节组成:
1)转速调节环节 对于转速闭环控制系统,一般都有转速调节器,其输入为给定值,输出为转矩给定值或转矩电流给定值。
2)磁链与转矩控制环节 磁链调节器的输入为给定值或一个由转速决定的函数,输出为电流量或电压量。由于异步电机可以根据不同的运行点调整相应的磁通大小,比如在恒功率状态下,通过减小磁通可以达到提升转速,从而扩大运行范围的目的,也就是“弱磁升速”;而在低速时,则可以使电机工作在过饱和状态来增强每安培电流产生转矩的能力,提高电机出力。
对于转矩调节器,其输入为转速调节器的输出值或给定值,输出为电流量或电压量。这两个调节器是方便控制系统对电磁转矩或电机磁场的控制。
3)电流调节环节 电流调节器的作用是根据离散控制选择优化的电压矢量,以期实现定子电流的有效控制。在某些情况下,也可利用磁通调节器、转矩调节器输出的电压指令值加补偿后直接形成优化电压矢量作用于变频器。因此,电流调节环节的作用不仅是控制定子电流跟踪所需要的电流指令,而是同时要考虑到各种调节方法的应用是为了选择合适的电压矢量,进而对变频器进行PWM控制,输出优化电压。
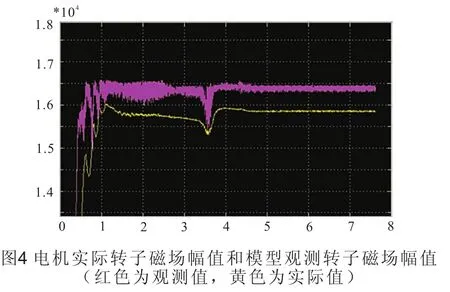
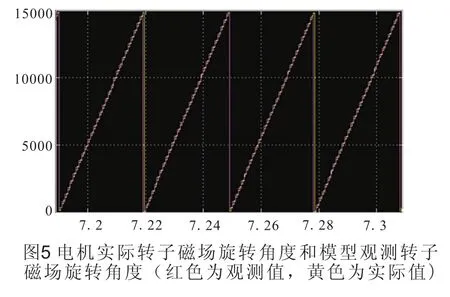
4)磁通与转矩观测 转矩和磁通控制的好坏很大程度上取决于转矩和磁通的观测是否准确。转矩的观测值来源于磁通的观测和定子电流值。因此磁通的观测尤为重要。因此设计合理有效的磁通观测器对以异步电机矢量控制有着极为重要的作用[3]。
以上几个环节构成矢量控制算法的核心组成部分,从程序流程和框架上又把控制程序主要分为主程序和中断服务程序两部分。主程序主要完成系统初始化、启动停止等状态指令查询、显示、参数读取及处理等;中断主要完成读取AD采样、转矩磁力计算、扇区确定、PWM产生及发生故障时的封锁等。
3.2 其它控制软件
PLC软件主要完成通讯工作与变频器的外围开关量控制,接收集控台遥控控制指令并通过RS485转发给DSP,接收来自DSP的变频器运行参数和故障报警信息并转发给集控台以备显示,根据DSP传达的指令完成相应阶段的开关量操作,检测到外部报警信息或者故障信息时发送信号到DSP与集控台,采集外围设备(如推进电机,变压器等)的温度信息并上传集控台。
面板主要完成就地操作的控制、变频器参数上传显示与设置下载、运行信息监控与报警故障定位。
4 仿真与试验
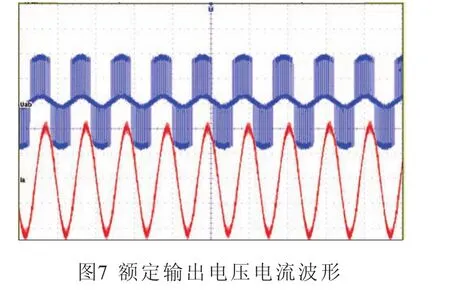
根据以上矢量控制的原理进行了一系列的仿真和试验,按图1所示搭建实验平台,推进电机采用300 kW异步电机,负载为300 kW交流自励同步发电机组,异步电机三角形形接法时额定电压为380 V, 额定电流为526 A,本文对此异步电机采用了星形接法,则额定电压为658 V, 额定电流为304 A。
用MATLAB仿真软件进行仿真验证上面理论。4.1提到的磁链观测采用电压模型, 载波频率1 kHz。
5 结论
本文从异步电机矢量控制的数学模型和出发,采用空间矢量调制方式,对船用推进变频器的矢量控制的控制系统进行了详细的理论分析,最后通过仿真与试验验证了本文所采用的控制系统在异步电机控制中的正确性与有效性,为在船用推进变频器上推广和使用奠定了良好的理论和实践基础。
[1] C.G. Hodge, D. J. Mattick. The electric warship[J]. Transaction on International Marine Engineering, 108, part2, 1996:109-125.
[2] 任俊杰,刘彦呈等. 船用大功率永磁电机矢量控制方案的比较.电机与控制学报,2011,2(5):32-37.
[3] 李永东. 交流电机数字控制系统. 北京:机械工业出版社,1998.
[4] 于国庆,张颖等. 基于DSP的异步电机SVPWM控制系统及优化研究. 河北科技大学学报,2012,33(3):258-262.
[5] 鲍秋燕,周涛. 基于TMS320F2812的船用异步电动机直接转矩控制系统. 船电技术,2010,30(10):20-24.
Research on Vector Control System for Marine Propulsion Converter
Kang Le ,Li Fan, Liu Zhongju
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
In this paper, the principles of vector control for marine propulsion converter are analyzed, the software and hardware design of vector control for asynchronous-motor are given based on DSP, and the basic principles of SVPWM are also presented. Some simulated and experimental results show that the proposed system is effective.
vector control; DSP; SVPWM
TM461
A
1003-4862(2014)03-0041-04
2013-05-17
康乐(1979-),男,硕士。研究方向:电力电子技术。
