警惕3球平衡问题的陷阱
2014-06-27黄尚鹏
黄尚鹏
(湖北省监利县朱河中学 湖北 荆州 433325)
题目:如图1所示,相同的两个匀质光滑球O1和球O2悬在结于定点O的两根长度都为l的轻绳上,此两球同时又支持一个等重的匀质光滑球O3.已知3个球的半径都为r,质量都为m,整个系统平衡时,两根轻绳与竖直方向的夹角都为α,O1O3和O2O3与竖直方向的夹角都为β,试证明:
(1)tanβ=3tanα;
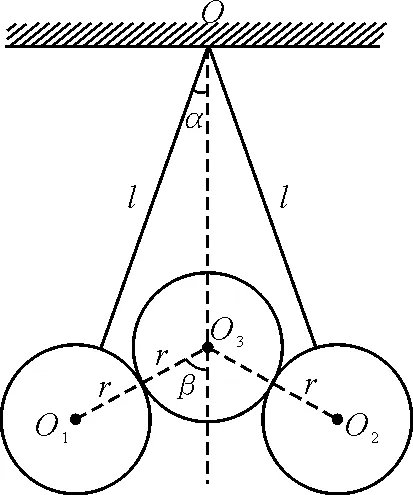
图1
解法一:我们知道如果一个力所做的功与具体路径无关,这种力叫做保守力.在保守力场中,保守力所做的功等于势能的减少.保守力学体系处于平衡状态时,根据系统势函数一阶导数为零的原理,可得出系统在保守力以及约束力等作用下的平衡位置,因此本题可用能量的观点求解,解法如下.
本题中的α和β是确定系统位置的两个独立变量,系统的势函数可用这两个独立变量表示.由于要对任意的α和β,写出系统的势函数,故α和β确定以前,不能认为两轻绳的方向分别通过O1和O2,而应该从α和β相互独立各为任意值开始分析,画出的部分几何图形如图2所示.

图2
选悬挂点O所在的水平面为重力势能参考面,则系统的势函数
Ep=-2mgOB-mgOO3=
-2mg(OA+AB)-mg(OA+AB-O3B)=
-3mg(OA+AB)+mgO3B=
+2mgrcosβ

(1)
(2)
由式(1)、(2)知
(3)
由式(3)知
2rsinβ-lsinα>0
tanβ=3tanα
(4)
由式(3)、(4)知
tanα·3tanα=tanα·tanβ=
(5)
由式(5)解得
2rsinβ-lsinα=rsinα
即
证毕.
解法二:若不用能量的观点求解本题,如图3所示.
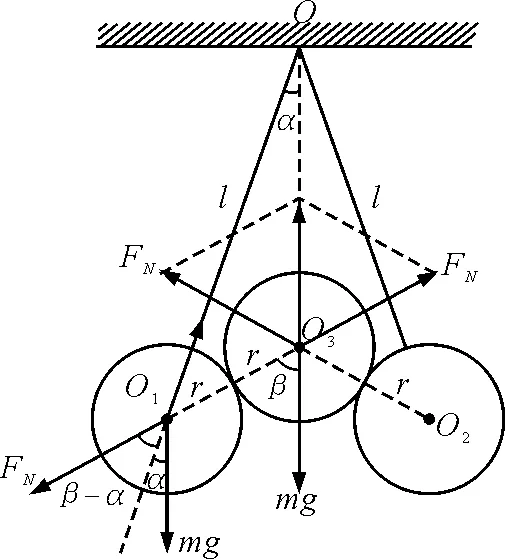
图3
对球O1,根据三力汇交原理,轻绳的方向应通过O1,在ΔOO1O3中,由正弦定理,得
即得结论.
设3个球间的弹力为FN,轻绳的拉力为T.对球O3,由3力平衡,得
mg=2FNcosβ
(6)
对球O1,在垂直于拉力的方向上,由平衡条件,得
mgsinα=FNsin(β-α)
(7)
由(6)、(7)两式,消去FN,有
2sinαcosβ=sin(β-α)=
sinβcosα-cosβsinα⟹tanβ=3tanα
对本题的深入思考:考虑到本题实际,α和β并不能无限接近于零,因为由几何关系知
即有β≥30°,等号成立的条件是球O1和球O2也相切.但当β=30°时,3个球两两相切,此时要求轻绳与球O3相交,如图4所示,这显然不符合实际,故要使整个系统能够在某位置处于平衡状态,考虑到本题实际,还需要求两根轻绳不能与球O3相交,即要求O3到轻绳的距离
d≥r
(8)

图4
由几何关系,知
d=2rsin(β-α)
(9)
由(8)、(9)两式,得
(10)
令β-α=θ(θ≥30°),则
β=α+θ
由
tanβ=3tanα
得
tan(α+θ)=3tanα
即
整理得
3tanθtan2α-2tanα+tanθ=0
(11)
式(11)是关于tanα的一元二次方程,方程有解的条件是判别式Δ≥0,即
Δ=(-2)2-4×3tanθ×tanθ≥0
解得
即
θ≤30°
故
β-α≤30°
(12)
由(10)、(12)两式,知
θ=β-α=30°
将θ=30°代入式(11),解得
即
α=30° 故
β=α+θ=60°
再由
得
此即要使整个系统能够在某位置平衡,绳长l和半径r必须满足的关系,若不满足这个关系,则系统在任何位置都不能平衡,或者即使理论上可能平衡,也要求轻绳与球O3相交,但这不符合实际.因此,本题中系统平衡的位置是唯一确定的,该系统平衡时,两根轻绳恰好与球O3相切,如图5所示.
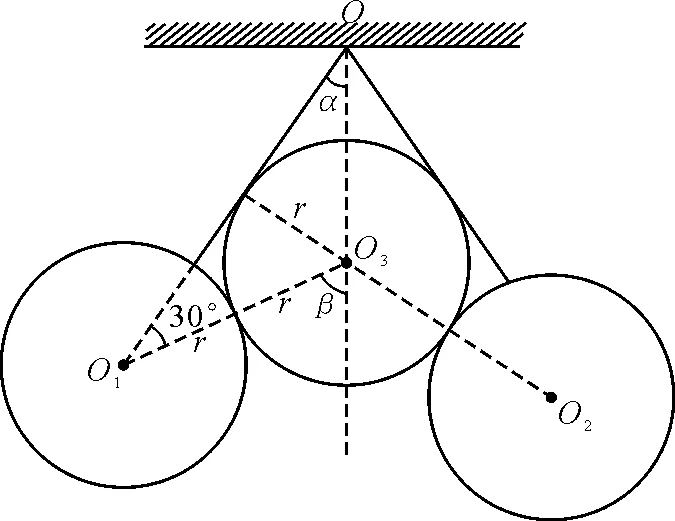
图3
参考文献
1 何海明.电荷摆球平衡问题的陷阱.中学物理教学参考,2013(11):52~53
2 中国科学技术大学高等数学教研室.高等数学导论·上册(第3版).合肥:中国科学技术大学出版社,2007.123~126
3 周衍柏.理论力学教程(第2版).北京:高等教育出版社,1986.286~287