基于反步法和非线性动态逆的无人机三维航路跟踪制导控制
2014-06-27刘重高晓光符小卫郤文清
刘重,高晓光,符小卫,郤文清
(1.西北工业大学电子信息学院,陕西西安 710129;2.航空电子综合技术重点实验室,上海 200233)
基于反步法和非线性动态逆的无人机三维航路跟踪制导控制
刘重1,高晓光1,符小卫1,郤文清2
(1.西北工业大学电子信息学院,陕西西安 710129;2.航空电子综合技术重点实验室,上海 200233)
为实现无人机在大范围内稳定、精确地跟踪三维参考航路,基于制导与控制回路独立设计的思路,提出了一种无人机三维航路跟踪制导控制方法。在制导外环,引入沿参考航路飞行的虚拟无人机作为向导并利用反步法设计三维航路跟踪的非线性制导律;在控制内环,以非线性动态逆理论和奇异摄动理论为基础,设计由机动指令生成器、角度转换器、慢回路姿态控制器和快回路角速度控制器所组成的飞行控制模块,对制导外环给出的制导指令进行快速精确地跟踪。基于Lyapunov稳定性理论证明了无人机航路跟踪制导控制方法的稳定性。通过对比分析无人机6自由度模型下的三维航路跟踪仿真,说明所提出的制导控制方法能够使得无人机精确地跟踪参考航路,从而验证了该方法的有效性、合理性。
飞行器控制、导航技术;无人机;航路跟踪;反步法;非线性动态逆;制导控制
0 引言
对于无人机来说,由于其为无人驾驶,飞行及任务执行都需要制导与控制系统操纵,使无人机按照航路规划系统规划出的航路飞行。为了能沿着或贴近规划好的航路飞行,要求无人机跟踪或者跟随该规划好的航路[1]。航路跟踪和航路跟随的区别在于对时间有无严格要求[2]。相对于航路跟随而言,航路跟踪较为复杂,不仅航路偏差需要控制,而且相应的跟踪航路时间误差也需要控制,这意味着需要同时对无人机的速度大小和方向进行控制,对于航路跟随问题,无人机的速度大小保持恒定不变,只需对其速度方向进行控制即可。航路跟踪主要应用于无人机编队控制,自动空中加油,对动态目标的追踪等动态任务,相较航路跟随更有实际意义。
针对无人机的航路跟踪/跟随问题,许多学者进行研究并取得了一系列成果,提出诸如采用位置误差的PD控制律、Serret-Frenet坐标系法、向量场法、视线法等等航路跟踪/跟随的理论和算法。文献[3-5]提出一种能跟随曲线航路的非线性制导律,该制导律在跟随直线航路时近似为PD控制律,在跟随曲线航路时,由于起到前馈控制的作用而使跟踪能力得以提高并能抑制干扰的影响; Nelson等[6]和Lawrence等[7]基于矢量场研究了一种精确跟随航路的算法,并用Lyapunov方法证明了在干扰条件下跟随误差方程的稳定性,但该方法一般适用于由直线与圆弧组成的航路,并且用该方法构造一般航路的矢量场较为复杂。文献[8]根据改进的纯追踪法提出了一种非线性航路跟随导引方法,并应用于受油机横、纵向导引控制,以实现精确控制受油机的飞行轨迹。Skjetne等[9]将航路跟踪问题分解为几何任务和速度任务,几何任务使无人机的位置收敛于参数化的期望航路,速度任务使得相应的跟踪航路时间误差趋于0,但跟踪精度不高。David等[10]在文献[3-5]的基础上设计了一种三维航路跟随控制律,来跟踪三维空间中直线和圆弧,该控制律能使无人机的航迹收敛于期望的航路,但该方法需要在直线段和圆弧段进行切换,在工程上难以实现。Ambrosino等[11]设计了一种基于视线的方法用于跟随利用Dubin算法规划出的三维空间航路。该方法在参考航路的切线上确定一个移动的前视点,该点与无人机在参考航路上正交投影点的距离为固定值L,称之为前视距离。利用无人机与前视点的位置误差矢量来设计关于航迹角的制导律,使得位置误差控制和航迹角误差控制解耦,反馈控制律形式简单,跟踪精度较高,鲁棒性较好,工程上易于实现,但该方法不足之处为不能给出无人机速度制导指令,这意味着其速度是恒定的,因此该方法只能实现参考航路的跟随,不能实现航路跟踪。
另外值得指出的是,在上述文献中,无人机通常以质点运动模型为主,较少考虑无人机的非线性动力学特性,没有与无人机的飞行控制系统结合起来,那么上述跟踪算法能否应用于工程实践还有待验证。若考虑无人机的非线性动力学特性时,实现无人机三维航路跟踪控制通常有两种方式[12]:一种是制导和控制一体化设计;另一种是采用制导与控制回路独立设计。制导与控制回路独立设计的方式物理概念更明确,也更容易实现[8]。Kaminer等[13]采用制导和控制一体化设计的思想,给出了一种制导和控制组合设计方法,给出了基于参考航路控制系统的线性模型,并采用增益调度技术设计了飞行控制系统。文献[11]采用制导与控制回路独立设计的思想,在外回路中设计基于视线法的航路跟随制导律,但其内回路的飞行控制系统仍然采用基于小扰动方程的传统设计方法,同Kaminer等[13]的方法一样存在着不能保证在全局范围内满足稳定性和精确性要求的缺陷。导致这一问题的主要原因是在对无人机6自由度非线性方程进行线性化过程中将不可忽视的非线性关系用线性关系代替或忽略。
针对以上研究中的缺陷,本文采用制导与控制回路独立设计的思路,在制导外环,通过引入沿参考航路飞行的虚拟无人机作为向导,将无人机的跟踪对象从参考航路转移到虚拟向导的位置信息和速度信息上,在此基础上利用反步法设计了三维航路跟踪制导律,使无人机与虚拟向导之间的位置误差和速度误差(包括速度的大小和方向)均渐进收敛于0,克服了文献[11]不能给出速度制导指令这一缺陷。另外,考虑到非线性动态逆控制直接面向非线性系统,而不是面向近似线性化后的线性系统进行设计,能够满足无人机非线性强耦合的控制要求,因此在控制内环,针对无人机非线性动力学特性,将非线性动态逆方法和奇异摄动理论相结合,设计了由机动指令生成器、角度转换器、慢回路姿态控制器和快回路角速度控制器所组成的飞行控制模块,对制导外环给出的制导指令进行精确地跟踪,解决了无人机在大范围内满足稳定性和精确性要求的三维航路跟踪问题。
1 航路跟踪制导控制系统结构
如图1所示,采用制导与控制回路独立设计思路,将无人机三维航路跟踪制导控制问题划分为虚拟向导飞行轨迹生成、非线性制导外环和飞行控制内环3个部分。虚拟向导飞行轨迹生成部分根据参考航路,实时计算出虚拟向导沿着参考航路飞行时的状态信息(包括位置、速度和加速度);非线性制导部分用于产生关于速度、航迹倾角、航迹偏角的制导指令,该制导指令输入到飞行控制部分中,以驱动无人机精确跟踪参考航路;飞行控制部分主要包括机动指令生成器、角度转换器、慢回路姿态控制器和快回路角速度控制器。机动指令生成器主要是根据航路跟踪制导指令,对无人机速度,航迹倾角和航迹偏角进行控制,这是控制飞行轨迹所必需的;角度转换部分实现航迹角和姿态角的转换,其本质是机动指令生成器和慢回路姿态控制器之间的耦合环节;慢回路姿态控制器对无人机横滚角、俯仰角和偏航角进行控制;快回路角速度控制器用于对无人机姿态角速度进行控制。无人机非线性模型是指无人机6自由度非线性微分方程。

图1 航路跟踪制导控制结构图Fig.1 Structure diagram of path tracking,guidance and control
2 无人机非线性数学模型
无人机6自由度、12个状态的非线性动态模型[14]可表示为

式中:无人机状态变量x=[p q r φ θ ψ v α β x y z]T,p、q、r分别为滚转角速度、俯仰角速度和偏航角速度,φ、θ、ψ分别为滚转角、俯仰角和偏航角,v、α、β分别为无人机的空速、攻角和侧滑角,x、y、z为无人机在惯性系中的位置;控制输入u=[F δeδaδr]T,δe、δa、δr分别为升降舵、副翼和方向舵偏转角,F为发动机的推力。
3 非线性动态逆飞行控制
直接应用状态反馈动态逆控制方法,需要求全逆,必须满足控制量与状态量数量相同的条件,这在飞行控制系统中是做不到的(在(1)式中,共有12个状态量和4个控制量)。为了避免这种不足,需将非线性动态逆方法与奇异摄动理论相结合,用部分逆方法[15-16]近似求解。
当气动力的改变导致力矩大小改变时,首先会引起无人机姿态角速度(p,q,r)的改变,然后会使得无人机的姿态角(φ,θ,ψ)发生改变。因此,根据无人机飞行状态的响应速度,可以设计出慢变的姿态角控制和快变的姿态角速度控制两个回路。如果快回路带宽为慢回路带宽的5~10倍,就可以使得快回路快速精确地跟踪慢回路。
3.1 快回路控制器设计
快回路动态逆控制器根据慢回路动态逆控制器产生的角速度指令[pc,qc,rc]T,以及无人机自身的状态变量,获得舵偏角指令[δe,δa,δr]T,输入到无人机非线性模型中。
快回路动态逆控制器选取的状态变量为无人机的姿态角速度x1=[p,q,r]T,控制量为舵偏角u= [δe,δa,δr]T,则根据无人机6自由度模型,可得到如下形式的仿射函数:
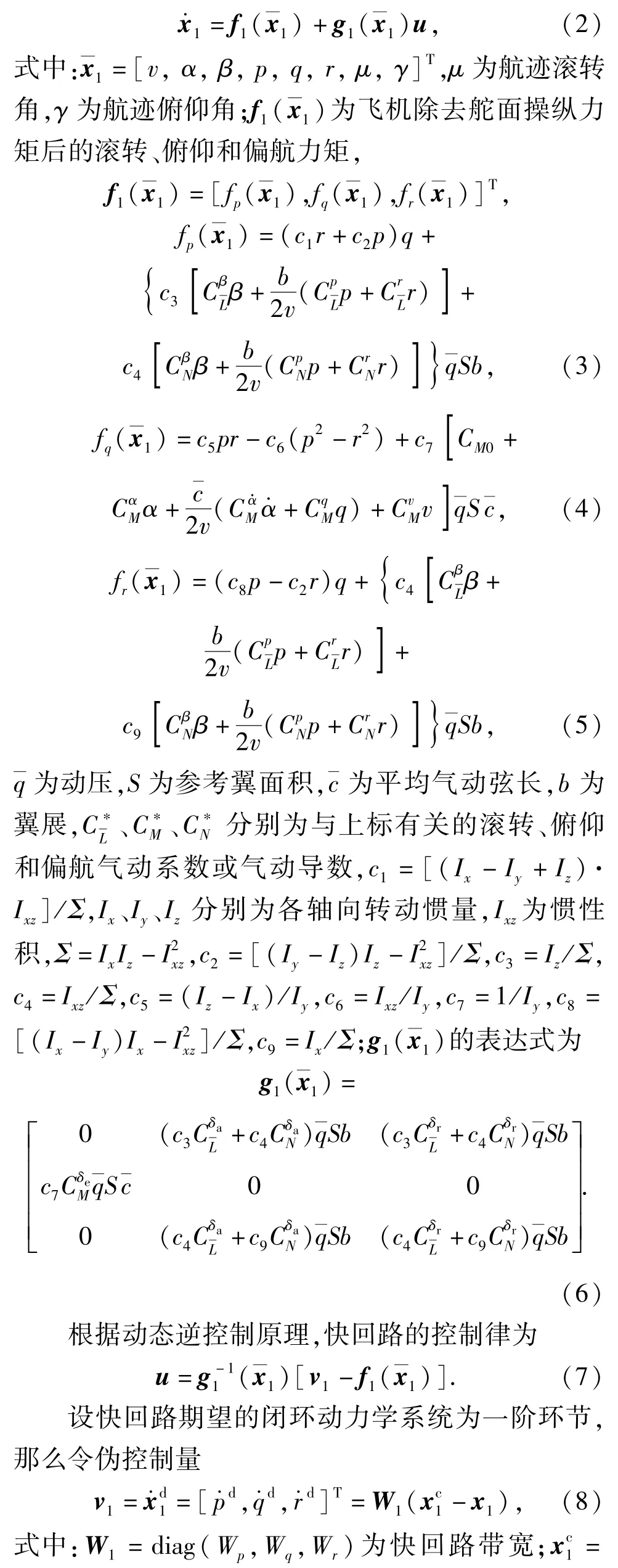

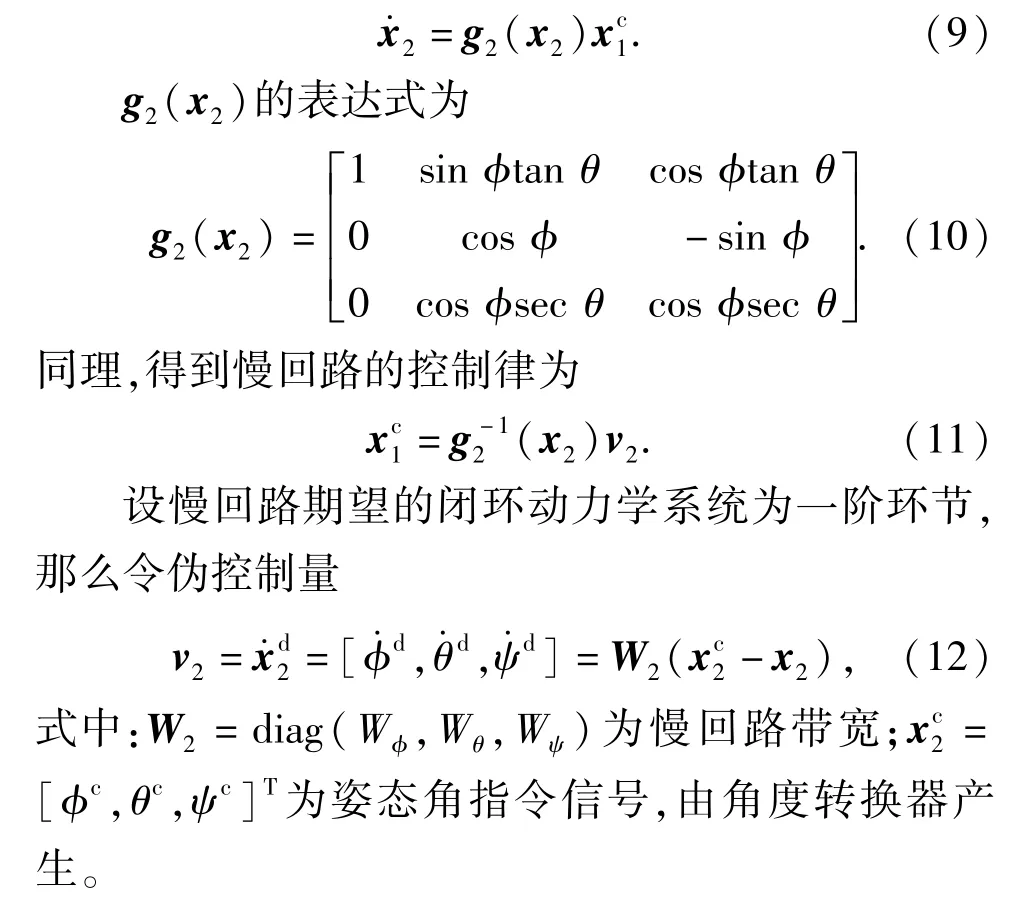
3.2 慢回路控制器设计
慢回路根据期望的姿态角指令[φc,θc,ψc]T,以及无人机自身的状态变量,获得角速度指令[pc,qc, rc]T,输入到快回路中。
慢回路动态逆控制器选取的状态变量为无人机的姿态角x2=[φ,θ,ψ]T,控制量为角速度指令xc1,则可得到如下形式的仿射函数:
3.3 角度转换器设计
由于机动指令生成器主要作用是根据非线性制导指令来产生关于推力F、攻角α、侧滑角β、航迹滚转角μ、航迹俯仰角γ和航迹偏航角χ的指令信号。然而姿态角控制回路输入的信号是姿态角指令,因此,需要在机动指令生成器和姿态角控制回路之间加入一个角度转换器,用来根据攻角α、侧滑角β、航迹角解算出相对应的姿态角。反过来,也可以根据攻角α、侧滑角β、姿态角解算出相对应的航迹角。
根据惯性系和机体系之间的变换关系,可以得到如下矩阵方程:

当cosθ≠0时,如果已知[α,β,μ,γ,χ]T可以根据(13)式唯一确定无人机的姿态角[φ,θ,ψ]T。
3.4 机动指令生成器
机动指令生成器主要是根据航路跟踪制导指令,对无人机速度矢量(v,γ,χ)进行控制,是控制飞行轨迹所必需的。机动指令生成器也采用非线性动态逆方法来设计,根据非线性制导指令[vc,γc,χc]T来产生推力Fc、攻角αc、侧滑角βc、航迹滚转角μc指令。其状态方程为

4 基于反步法的航路跟踪制导律
航路跟踪制导律的设计是实现无人机精确跟踪参考航路的关键。无人机在进行航路跟踪之前,必须确定其参考航路的特性,如果引入一个虚拟无人机作为向导,让它沿着参考航路飞行,那么可以根据无人机的质点运动方程得到每一时刻虚拟向导的位置信息(xr,yr,hr)和速度信息(vr,γr,χr),将虚拟向导的位置信息和速度信息作为真实无人机的参考信号,从而可将无人机直接对参考航路的跟踪问题转换成对虚拟向导的跟踪问题,这样做可以简化三维航路跟踪控制律的设计难度,并提高航路跟踪效果。根据这一思路,引入虚拟无人机作为向导,基于反步法设计了一种三维非线性航路跟踪制导律,与非线性动态逆飞行控制模块相结合,驱动无人机对三维空间参考航路进行精确地跟踪。
基于反步法的航路跟踪制导律的原理如图2所示,假设有一架沿着预定参考航路Γ飞行的虚拟无人机P作为真实无人机U的向导,那么预定的参考航路Γ可以用虚拟向导的质点运动学方程来描述:

式中:xr、yr、hr表示虚拟向导的位置;vr、γr、χr分别表示虚拟向导的速度、航迹倾角、航迹偏角。

图2 无人机跟踪三维航路示意图Fig.2 Path tracking geometry
由于飞控内环是采用非线性动态逆方法来设计的,其期望的闭环动力学系统设计成一阶环节。因此,无人机的质心运动学和动力学模型可以写成如下形式:
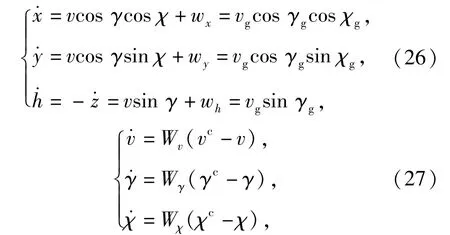
式中:v、vg分别表示空速和地速;γg为航迹倾角;χg为航迹偏角;wx、wy和wh分别为风速w在地面系上的投影。
基于反步法的航路跟踪制导律由定理给出。
定理(基于反步法的航路跟踪制导律) 当给定的参考航路Γ由微分方程(25)式来描述,无人机的质心运动学和动力学模型可以写成(26)式、(27)式的形式时,那么按照(28)式给出的非线性航路跟踪制导律可以保证航路跟踪误差‖e‖→0 (‖·‖表示向量的2范数),即飞行轨迹渐进收敛于参考航路Γ,其中e=[x-xr,y-yr,h-hr,vg-vr, γg-γr,χg-χr]T,h为飞行高度。
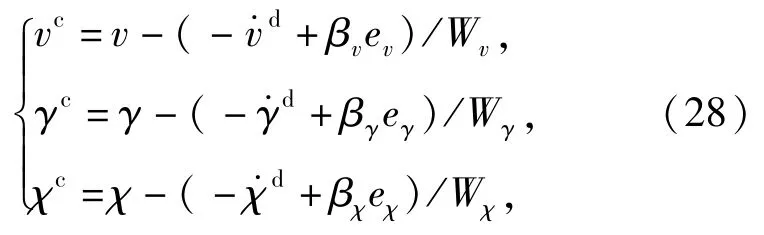
式中:vd、γd、χd为航路跟踪位置误差渐进收敛到0的期望速度、期望航迹倾角、期望航迹偏角;ev、eγ、eχ为航路跟踪的速度误差、航迹倾角误差和航迹偏角误差。


5 虚拟向导飞行轨迹的生成
从航路跟踪制导律的表达式可以看出,为了实现无人机对参考航路的精确跟踪,需要知道每时刻虚拟向导在参考航路上的飞行状态信息,例如位置信息[xr,yr,hr]T,速度信息和加速度信由于虚拟向导沿着参考航路飞行,因此这些状态信息可以由所给定的参考航路Γ来确定。一般来说输入到航路跟踪制导与控制系统的参考航路通常是由一系列连续的航路点来描述[2],因此需要研究如何基于预设航路点,实时计算出虚拟向导沿着参考航路飞行时的状态信息,即根据预设航路点生成虚拟向导的飞行轨迹。
根据预设航路点生成虚拟向导的飞行轨迹的原理如图3所示,将航路点按序号连线成为直线航路,各直线段航路的航迹倾角γk∈(-0.5π,0.5π)和航迹偏角χk∈[0,2π)为


图3 根据航路点生成虚拟向导的飞行轨迹Fig.3 Flight path planning for virtual vehicle in light of reference waypoints
在无人机飞行过程中,虚拟向导P会沿着参考航路飞行,而参考航路由连续的线段组成。因此,可以根据无人机的当前位置选择合适的当前跟踪航路段,并在当前跟踪航路段上计算出虚拟向导P的速度vr及其变化率需要根据具体的飞行任务和无人机的飞行性能综合确定),航迹倾角γr及其变化率和航迹偏角χr及其变化率
假设无人机当前跟踪第k段航路Pk-1Pk,则有那么根据(25)式可求对时间t积分即可求得每时刻虚拟向导的位置xr、yr、hr.这样就得到了每时刻虚拟向导在参考航路上的飞行状态信息,并将其应用于非线性航路跟踪制导律,可以驱动无人机对当前航路段进行精确的跟踪。当无人机到航路点Pk的距离d在一个指定的距离r内(即d<r)时,无人机开始跟踪下一直线航路段PkPk+1.
6 仿真算例
6.1 仿真实验1
采用无人机的6自由度非线性数学模型,对基于反步法和非线性动态逆的无人机三维航路跟踪制导控制方法进行了仿真验证。
仿真过程中,无人机的气动系数根据文献[14]中给出的数据经过插值计算而来;给定的航路点参数如表1所示;姿态角速度控制回路、姿态角控制回路以及机动指令生成器的带宽为:Wp=Wq=Wr= 10 rad/s,Wφ=Wθ=Wψ=2 rad/s,Wv=Wγ=Wχ= 0.4 rad/s;航路跟踪制导律参数为:αx=αy=αh=1 s-1, βv=βγ=βχ=4 s-1;无人机的初始位置为(1 000m, 1 000m,3 000m),初始飞行速度为50m/s,初始航迹偏角和航迹倾角均为0°,要求无人机沿着航路点连线飞行,速度保持为50 m/s,当无人机到航路点Pk的距离小于r=50 m时,开始跟踪下一直线航路段PkPk+1.仿真时间步长为Δt=0.001 s.

表1 参考航路点数据Tab.1 Data of reference waypoints
在此,将基于反步法和非线性动态逆(BS+ NDI)的制导控制方法与文献[11]中的基于视线和增益调度(LOS+GS)的制导控制方法进行仿真对比。从跟踪精度和对参考角度的跟踪效果上来说明BS+NDI方法的优点。
图4为参考航路点连线和两种方法的仿真飞行航迹的对比结果。为了比较两种方法的跟踪精度,引入交叉误差作为评价指标。在本文中,交叉误差定义为无人机到参考直线航路段的垂直距离,在图3中用~e表示。

图4 无人机三维航路跟踪曲线图Fig.4 Reference and actual paths
图5是两种方法的交叉误差对比结果,BS+ NDI方法的平均交叉误差为5.03m,而LOS+GS方法的平均交叉误差为6.32 m.因此BS+NDI方法比LOS+GS方法具有较高的跟踪精度,与参考航路更加贴近。这是因为在LOS+GS方法中跟踪精度受制于前视距离L大小的选择,当L较小时,会导致制导指令信号幅值过大,控制内环无法有效地跟踪制导指令,从而影响跟踪精度,而当L较大时,会导致跟踪稳态误差的存在,同样影响跟踪精度。BS+ NDI方法引入沿着参考航路飞行的虚拟无人机作为真实无人机的向导,控制无人机跟踪虚拟向导来间接实现对参考航路的跟踪,可以避免LOS+GS方法中需要选择合适的前视距离L的问题,因此平均交叉误差较小。
图6为参考速度和实际速度的对比结果。由于在航段切换时,无人机与虚拟向导之间存在着较大的位置误差,在制导律的作用下无人机将增大速度,力求在较短的时间内跟踪上虚拟向导,然后其速度大小以指数的形式收敛到50m/s,这样使得无人机能更有效地跟踪虚拟向导,并与虚拟向导一起沿着参考航路飞行,从而实现对参考航路的跟踪。而LOS+GS方法由于不能给出速度的制导指令,所以无人机的速度基本保持不变。
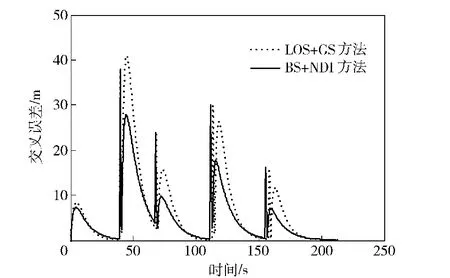
图5 交叉误差变化曲线Fig.5 History of cross error

图6 参考速度和实际速度的变化曲线Fig.6 Reference and actual speeds
图7、图8为参考航迹倾角、航迹偏角和实际航迹倾角、航迹偏角的对比结果。当航路段P1P2切换到P2P3时,对参考航迹倾角、航迹偏角的跟踪,BS+ NDI方法分别存在8.9%、4%的超调量,而LOS+ GS方法分别存在着14.2%、7.3%的超调量。这是因为LOS+GS方法在设计制导律时没有考虑到航迹角制导指令变化率的限制,这将导致基于小扰动方法所设计的控制内环不能快速精确地跟踪制导外环所给出的指令,出现超调量过大的情况;而BS+ NDI方法引入具有一定的动力学特性的虚拟向导作为真实无人机的跟踪对象,并且其外环制导律能与内环的动态逆控制律有效地结合,更适于解决无人机大机动的航路跟踪控制问题,所以对参考航迹倾角和航迹偏角进行跟踪时,BS+NDI方法的超调量更小,跟踪效果更好。

图7 参考航迹倾角和实际航迹倾角的变化曲线Fig.7 Reference and actual vertical flight path angles

图8 参考航迹偏角和实际航迹偏角的变化曲线Fig.8 Reference and actual horizontal yaw angles
图9是飞行过程中,无人机与虚拟向导之间位置误差的变化曲线,从中可以看出BS+NDI方法能够保证位置误差指数收敛到0,因此能够实现对空间三维参考航路的精确跟踪。
总之,所提出的BS+NDI方法实现了无人机在大范围内满足稳定性和精确性要求的三维航路跟踪制导控制,在整个航路跟踪制导和控制系统的作用下,无人机能以较小的偏差沿着参考航路飞行,只有在航段切换的转弯机动过程中存在着较大的偏差,这是因为在转弯机动时,虚拟向导将切换到下一个航路点的连线上,此时无人机需要调整自身的速度、航迹倾角和航迹偏角,以跟踪虚拟向导,但是在这之后无人机的速度、航迹倾角和航迹偏角均实现了对各自参考指令的跟踪,同时与虚拟向导的位置误差以指数的形式较快地收敛于0,从而实现了航路的精确跟踪,并且从表2中可以看出,无论是在跟踪精度上,还是在对参考航迹倾角和航迹偏角的跟踪效果上,BS+NDI方法均要优于LOS+GS方法。

图9 无人机与虚拟向导的位置误差变化曲线Fig.9 History of position error between virtual and real UAVs

表2 两种方法的对比Tab.2 Comparison of twomethods
6.2 仿真实验2
为了分析BS+NDI方法在稳定侧风下对参考航路的跟踪效果,进行有风环境下和无风环境下的航路跟踪对比仿真。选取参考航路为一段直线航路,航路起点为P1(0 m,0 m,3 000 m),航路终点为P2(1 000m,1 000 m,3 000 m)。加入风速恒为20m/s的稳定侧风w,其在地面系x、y和z轴上的3个投影分量为wx=0m/s、wy=-20m/s和wz=0m/s.无人机的初始位置为(0 m,0 m,3 000 m)。航路跟踪制导律参数为:αx=αy=αh=0.1 s-1,βv=βγ= βχ=0.4 s-1.其他条件与仿真实验1一致。
图10为有风和无风环境下,BS+NDI方法对参考航路P1P2的跟踪效果。图11为有风和无风条件下的交叉误差对比结果。其中在有风环境下,平均交叉误差为32.3 m;无风环境下,平均交叉误差为24.74m.从图10和图11中可以看出,在稳定侧风的影响下,虽然无人机的飞行轨迹与参考航路之间的偏差比无风时要大,但BS+NDI方法仍然能够实现无人机对参考航路的跟踪。

图10 有风和无风环境下航路跟踪效果Fig.10 Reference and actual paths with and withoutwind

图11 有风和无风环境下交叉误差变化曲线Fig.11 History of cross errors with and withoutwind
图12、图13和图14分别为有风和无风条件下的无人机速度、航迹倾角和航迹偏角的对比结果。从中可以看出,在稳定侧风的环境中,对于参考速度、参考航迹倾角和参考航迹偏角,BS+NDI方法仍具有良好的跟踪效果。因此,在有风环境下和无风环境下的航路跟踪对比仿真结果,验证了BS+NDI方法在稳定侧风的影响下仍然能够实现无人机对三维参考航路的跟踪。
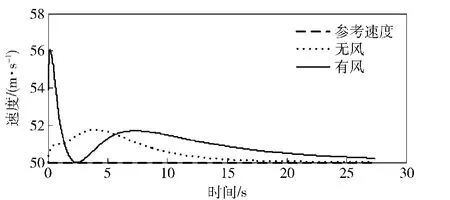
图12 有风和无风环境下无人机速度变化曲线Fig.12 Reference and actual speeds with and withoutwind
7 结论
基于制导与控制回路独立设计的思路,提出了一种无人机三维航路跟踪制导控制方法,通过对比仿真验证了该方法的可行性,得到了以下结论:

图13 有风和无风环境下无人机航迹倾角变化曲线Fig.13 Reference and actual vertical flight path angles with and withoutwind

图14 有风和无风环境下无人机航迹偏角变化曲线Fig.14 Reference and actual horizontal yaw angleswith and withoutwind
1)通过引入沿参考航路飞行的虚拟无人机作为向导,将被控无人机的跟踪目标从参考航路转移到虚拟向导的位置信息和速度信息上,可以降低三维航路跟踪控制律的设计难度,提高航路跟踪效果。
2)设计的非线性动态逆飞行控制器能对制导指令进行精确跟踪,并在全局范围内满足稳定性要求,同时响应曲线平滑,超调量小。
3)采用无人机的6自由度非线性数学模型进行的三维航路跟踪的仿真对比实验表明,所提出的无人机三维航路跟踪制导控制方法能够实现无人机对三维参考航路的精确跟踪。
4)通过在有风环境下和无风环境下的航路跟踪对比仿真,验证了所提出的无人机三维航路跟踪制导控制方法在稳定侧风的影响下仍然能够实现无人机对三维参考航路的跟踪。
5)动态逆方法依赖于被控对象的精确数学模型,当不能精确求逆而导致逆误差存在时,控制内环的鲁棒性不能得到保证,所以在后续工作中,还需进一步研究如何抑制或者消除逆误差,以提高控制内环的鲁棒性。
References)
[1] Tsourdos A,White B,ShanmugavelM.Cooperative path planning of unmanned aerial vehicles[M].Bognor Regis,West Sussex, UK:John Wiley and Sons Ltd,2011.
[2] Shima T,Rasmussen S.UAV cooperative decision and control challenges and practical approaches[M].Philadelphia,PA:Society for Industrial and Applied Mathematics,2009.
[3] Park S,Deyst J,How JP.A new nonlinear guidance logic for trajectory tracking[C]∥AIAA Guidance,Navigation,and Control Conference.Providence,RI:AIAA,2004.
[4] Deyst J,How JP,Park S.Lyapunov stability of a nonlinear guidance law for UAVs[C]∥AIAA Atmospheric Flight Mechanics Conference and Exhibit.San Francisco,CA:AIAA,2005.
[5] Park S,Deyst J,How JP.Performance and Lyapunov stability of a nonlinear path-following guidancemethod[J].Journal of Guidance,Control,and Dynamics,2007,30(6):1718-1728.
[6] Nelson D R,Barber D B,McLain TW,et al.Vector field path following forminiature air vehicles[J].IEEE Transactions on Robotics,2007,23(3):519-529.
[7] Lawrence D A,Frew EW,PisanoW J.Lyapunov vector fields for autonomous unmanned aircraft flight control[J].Journal of Guidance,Control,and Dynamics,2008,31(5):1220-1229.
[8] 盖文东,王宏伦,李大伟.基于自适应动态逆的自动空中加油轨迹跟踪[J].北京航空航天大学学报,2012,38(5):585-590.
GAIWen-dong,WANGHong-lun,LIDa-wei.Trajectory tracking for automated aerial refueling based on adaptive dynamic inversion [J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(5):585-590.(in Chinese)
[9] Gates D J.Nonlinear path followingmethod[J].Journal of Guidance,Control,and Dynamics,2010,33(2):321-332.
[10] Skjetne R,Fossen T I,Kokotovic P V.Robust outputmaneuvering for a class of nonlinear systems[J].Automatica,2004, 40(3):373-383.
[11] Ambrosino G,Ariola M,Ciniglio F,et al.Path generation and tracking in 3-D for UAVs[J].IEEE Transactions on Control Sytems Technology,2009,17(4):980-988.
[12] Shah M Z,Samar R,Bhatti A I.Cross-track control of UAVs during circular and straight path following using slidingmode approach[C]∥12th International Conference on Control,Automation and Systems.Jeju Island,Korea:ICC,2012:185-190.
[13] Kaminer I,Pascoal A,Hallberg E,et al.Trajectory tracking for autonomous vehicles:an integrated approach to guidance and control[J].Journal of Guidance,Control,and Dynamics,1998, 21(1):29-38.
[14] 沈怀荣,邵琼玲,王盛军,等.无人机气象探测技术[M].北京:清华大学出版社,2010.
SHEN Huai-rong,SHAO Qiong-ling,WANG Sheng-jun,et al. Technology of environmental observations for unmanned aerial vehicles[M].Beijing:Tsinghua University Press,2010.(in Chinese)
[15] 陈永亮.飞机大迎角非线性动力学特性分析与控制[D].南京:南京航空航天大学,2007.
CHEN Yong-liang.Nonlinear dynamic characteristics analysis and control of aircraft at high-angle-of-attack[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2007.(in Chinese)
[16] 郭锁凤,申功璋,吴成富.先进飞行控制系统[M].北京:国防工业出版社,2003.
GUO Suo-feng,SHEN Gong-zhang,WU Cheng-fu.Advanced flight control system[M].Beijing:National Defense Industry Press,2003.(in Chinese)
Three-dimensional Path tracking Guidance and Control for Unmanned Aerial Vehicle Based on Back-stepping and Nonlinear Dynam ic Inversion
LIU Zhong1,GAO Xiao-guang1,FU Xiao-wei1,XIWen-qing2
(1.School of Electronics and Information,Northwestern Polytechnical University,Xi'an 710129,Shaanxi,China;
2.Science and Technology on Avionics Integration Laboratory,Shanghai200233,China)
In order to realize the three-dimensional path tracking guidance and control for unmanned aerial vehicle(UAV),a new path tracking guidance and controlmethod is presented,which separates the vehicle guidance and control problems into an outer guidance loop and an inner control loop.In outer guidance loop,the problem of tracking reference path is transformed to the tracking of a virtual vehicle by using a virtual vehicle which moves along the reference path for the real aircraft to track.A nonlinear guidance law is proposed based on the back-steppingmethod.In inner control loop,the flight control is designed based on the nonlinear dynamic inversion(NDI)theory and the time scale separation(TSS). The flight control can follow the commands generated by the outer guidance loop fleetly and accurately, which includesmaneuver command generator,angle calculator,slow loop attitude angles control and fastloop attitude angle rate control.The stability of system is proved based on Lyapunov stability theory.Six degrees of freedom(6-DOF)simulation results illustrate that UAV can track three-dimensional path accurately,and demonstrate the feasibility and reasonability of the proposed method.
control and navigation technology of aerocraft;unmanned aerial vehicle;path tracking; back-stepping;nonlinear dynamic inversion;guidance and control
V279
A
1000-1093(2014)12-2030-11
10.3969/j.issn.1000-1093.2014.12.015
2014-02-24
航空科学基金、航空电子系统综合技术重点实验室基金联合项目(20125553030);全国高校博士点基金项目(20116102110026)
刘重(1985—),男,博士研究生。E-mail:15829732829@163.com;
高晓光(1957—),女,教授,博士生导师。E-mail:xggao@nwpu.edu.cn
