DSm T的主冷却剂泵并发故障融合方法分析
2014-06-23韩文伟
郭 清,夏 虹,韩文伟
(1.哈尔滨工程大学工程训练中心,150001哈尔滨;
2.哈尔滨工程大学核安全与仿真技术国防重点学科实验室,150001哈尔滨)
DSm T的主冷却剂泵并发故障融合方法分析
郭 清1,2,夏 虹2,韩文伟2
(1.哈尔滨工程大学工程训练中心,150001哈尔滨;
2.哈尔滨工程大学核安全与仿真技术国防重点学科实验室,150001哈尔滨)
针对核电站主冷却剂泵故障特征微弱难以有效辨识及DST仅能解决在无高冲突辨识框架下的单一故障诊断等问题,提出一种基于DSmT决策级主冷却剂泵并发故障融合诊断模型.采用核主泵自由DSm模型和混合DSm模型对含有故障信息的多个独立证据源进行动态融合计算;分析核主泵DSmT故障特征信度赋值变化,确定主冷却剂泵故障(并发故障)诊断总决策.结果表明,将核仿真机采集TS、SS、VS和DS多源传感器数据直接对基本概率函数进行赋值,得出主冷却剂泵故障(并发故障)决策结果与实际工况相符,实例验证了所提方法的可行性、有效性及准确性.
DSmT;故障识别;主冷却剂泵;信息融合
根据核电站运行事件综合报告统计显示发生故障率较高的设备主要集中在核反应堆中主冷却系统,其中的主冷却剂泵(简称核主泵)是核岛中唯一高速旋转的设备,在长期的高温、高转速的工况下其故障及并发故障占有极高的比例.主冷却剂泵早期故障特征十分微弱,受轴系复杂结构和信号传播介质的影响,其微弱动态故障信号具有较高的隐蔽性和不确定性,极易被人忽略.
按照输入信息的抽象层次可将信息融合划分为数据层融合、特征层融合和决策层融合.从信息融合的层次划分角度看,文献[1]研究了数据层上使用小波分析方法从主泵主轴不对中、初始弯曲和开裂纹3个典型故障振动曲线中提取有效故障特征信息.文献[2]研究了特征层上使用小波包方法,在无动不平衡频率频带内得主泵出裂纹振动特征频率.本文在此基础上研究决策层核主泵DSmT并发故障融合算法,针对主冷却剂泵故障识别难以决策问题,构建核主泵DSmT故障(并发故障)模型,验证核主泵并发故障DSmT融合算法的有效性.
1 核主泵DSmT故障诊断融合方法
DSmT[3-7](dezert-smarandache theory)是信息融合算法中的新分支,它是D-S证据理论(D-S vidence theory,DST)的扩展.DSmT能够组合成以信任函数表达不确定、高冲突、不精确的独立信源集合,当信源间的冲突变大或者元素模糊、相对不精确时,DSmT能够解决复杂静态或动态融合问题.不但能实现DST的功能,还能很好地弥补DST在处理高冲突甚至相互矛盾证据时的缺陷,因此它也被称为似真和冲突推理理论(plausible and paradoxical reasoning theory).采用DSmT冲突比例重分配的规则,可化简各类证据间矛盾信息,重新分配不符合实际的故障诊断证据.
1.1 核主泵并发故障DSm T融合分析
当前核动力装置结构越来越精细,辅助自动化程度越来越高,因而并发故障发生可能性越来越大,并发故障类型也越来越多,其中以主冷却剂泵并发故障概率最高.DST辨识框架Θ由n个完备且排他的元素θi(i=1,2,…,n)组成,即Θ={θ1,θ2,…,θn}.辨识框架中元素θi(i=1,2,…,n)相互排斥,即θk∩θl=Ø(k≠l;k,l=1,2,…,n).当DST应用于核动力装置故障诊断时,令θi为核设备的故障模式,由于θi间具有排他性使得并发故障在DST框架下无法表示,因此DST故障诊断方法仅适用于单一故障诊断,并不能实现对核设备并发故障诊断要求.
DSmT提出了描述、分析和组合有效信息的新形式,DSmT中的辨识框架Θ是在DST基础上放宽排他性约束而建立起来的,它允许鉴别框中命题间存在矛盾因素.DSmT辨识框架中元素没有要求必须是互斥的硬性条件,即DSmT中Θ元素不必规定θk∩θl=Ø(k≠l;k,l=1,2,…,n).相对于DST幂集2Θ概念,DSm T扩展为超幂集DΘ概念,对辨识框架Θ中元素进行并(∪)和交(∩)运算产生集合.经分析发现并发故障诊断理论框架可直接产生,用元素之间“交”表示并发故障.如果核主泵的两种故障模式分别用θ1和θ2表示,那么θk∩θl表示θ1发生且θ2也发生,用两种故障模式“∩”可以表示两种故障同时发生.研究主冷却剂泵DSmT并发故障诊断解决方案时,首先需要建立涵盖核主泵单发和并发故障的辨识框架,在此框架中采取合适的DSmT组合规则对各独立证据源进行递归融合计算,得出主冷却剂泵并发故障融合决策结果.
DSmT的一个主要缺点和目前还没有解决或者说无解的问题是,当焦元大于10时,会发生信息爆炸的情况.也就是说如果核动力装置故障模式种类越多,计算量越大.但在实际核动力装置运行中,故障模式不会同时超过10种,核设备运行时要求必须满足单一故障准则,因而在核动力设备中几乎永远不存在10种并发故障发生,除非是在核事件、核泄露或核事故情况下.因此本文研究的DSmT并发故障融合模型不存在“焦元爆炸”现象.对于核动力装置故障类型基本是可预计的,某种故障仅跟其他某个或某些故障并发,跟另一些故障一般来说永远也不会发生.也就是说针对某具体核设备而言,常发生的并发故障只有一种或几种,如主冷却剂泵常并发故障主要集中在转子不对中和转子不平衡.这样在构建DSmT辨识框架和定义约束条件时,就可以不考虑不可能发生或很少发生的并发故障,假设有两种故障模θ1和θ2,如果θ1和θ2不可能发生或很少同时发生,则可令θ1∩θ2=Ø.这样|DΘ|就会大大减少,计算量也能随之骤减.
1.2 核主泵并发故障DSm T融合过程
本文研究的核主泵DSmT目标判决准则与基本证据理论的决策方法相似但却有实质的不同,其相同点是都采用信度函数赋值对故障目标类别进行决策判断.并发故障DSmT融合模型依据经典DSm组合规则和混合DSm组合规则[8-11]来实现核主泵故障证据源在空间域和时间域的决策融合.经典DSm组合规则利用递归形式表述,在时/空域能够有效地进行时间域融合,快速实现核主泵DsmT动态融合决策判断.
核主泵DSmT融合模型进行故障信息诊断时,如图1所示,首先在自由DSm模型中,对n个证据源S运用经典DSm组合规则给出完整性约束条件,即在自由DSm模型Mf(U)中加入完整性约束条件,构建新的混合DSm模型M(U),然后在此模型中使用混合DSm组合规则,最终得出融合决策结果.

图1 核主泵并发故障DSm T融合过程分解
核主泵DSmT融合模型计算时主要采用递归计算融合思想,对于n个证据源,先在自由DSmT模型上计算前n-1条证据的融合结果,再经在自由DSm模型上得到第n条证据和前n-1条证据融合结果逐次进行融合计算,最后在混合DSm模型上使用混合DSmT规则得出第n条证据,即最终融合决策判断结果.DSmT组合规则不仅可以诊断出单一故障,同时还能够诊断出并发故障.
1.2.1 核主泵自由DSm模型融合过程
令Θ为一鉴别框架,如果函数m:2Θ→[0,1]满足条件:m(φ)=0;∑A⊆Θm(A)=1,则m(·)称为基本概率赋值(basic probability assignment,BPA,也称为m函数),表明焦元的信度大小.其中:2Θ为Θ的幂集;Ø为空集.m(·)是核主泵所需的证据评价,也可称为故障评价.对于不确定和高冲突的证据源,自由DSm模型进行融合时有∀A≠Ø∈DΘ,

1.2.2 核主泵混合DSm模型融合过程
混合DSm模型融合过程是在考虑了核主泵所有可能的完全约束而扩展来的,混合DSm模型M(θ)是在自由DSm模型Mf(θ)中,对DΘ的命题A中引入完全约束条件,其前提条件是涵盖所有对应模型的本质和属性.在主冷却剂泵DSmT故障诊断中,一部分元素θi(i=1,2,…,n)之间是相互排斥的,即θk∩θl=Ø(k≠l;k,l=1,2,…,n),为了更好地描述核主泵并发故障特征的融合问题,符合实际工况将这些互斥约束都加到核主泵故障DSm模型中,相关故障证据源(A∈DΘ)间组合混合DSm组合规则为

其中S1(A)、S2(A)和S3(A)的表达式分别为

式中:S1(A)为描述主冷却剂泵DSmT故障辨识框架下k个独立信息源基于自由DSm模型的经典组合公式;S2(A)为核主泵所有相对和绝对空集的BPA转化为相对的或完全未知的BPA;S3(A)为把核主泵相对空集的BPA转换给非空集合的并集.
对于研究对象主冷却剂泵而言,S2(A)和S3(A)在实际故障诊断中不可能发生并发故障,因此对式(4)和式(5)都进行了约束设定,即无并发故障情况都定义为Ø,这样既简化了表达式计算量,又剔除了无用信息,此后再对余下故障所包含信息进行重新融合分配.
1.3 核主泵DSm T故障特征信度赋值分析
选取主冷却剂泵故障类型作为辨识框架,主冷却剂泵各种可能故障集合构成辨识框架,故障的每一症状作为一个独立证据源.若有n种故障,则Θ={θ1,θ2,…,θn},超幂集DΘ形成了核主泵测量数据结构.采用各证据独立源的基本概率赋值m(A)表征故障特征,它能够直观地表达出核主泵各故障的融合信度分配.令Θ={θ1,θ2},在初始基本信度赋值m1(·)和m2(·)中引入一个小变量ε>0,分析比较m(·)时,m1(θ1)= 1-ε,m1(θ2)=ε和m2(θ1)=ε,m2(θ2)=1-ε的数值融合结果.
依据混合DSm组合规则,能够得到核主泵在完全未知情况下预期信度赋值,对于θ1、θ2、θ1∩θ2及θ1∪θ2的信度赋值随着变量ε的变化,如图2所示,获得自由DSm规则和混合DSm规则对比的融合信度赋值估计响应变化曲线.
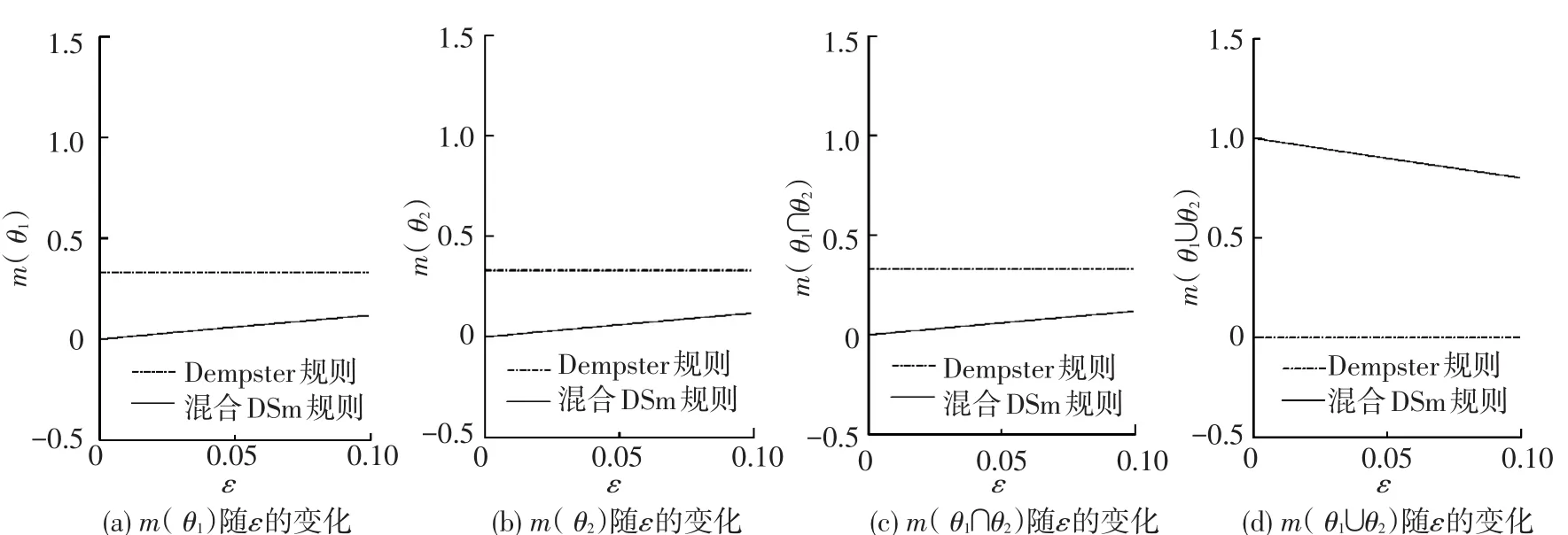
图2 变量ε对θ1∩θ2信度赋值的响应
2 核主泵DSmT并发故障融合算例
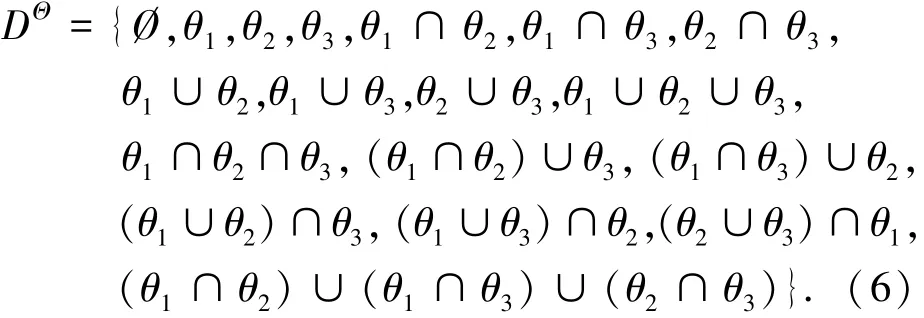
设核主泵故障目标识别框架为Θ={θ1,θ2,θ3},令:θ1为转子不平衡;θ2为转子不对中;θ3为主轴损坏.构成的初始超密集DΘ为
2.1 核主泵基本概率赋值的确定
根据压水堆核电站控制标准在核仿真机上配设秦山核电站(1期)KSB公司RER700型主泵运行参数,如表1所示,主泵仪表测点包含4种测量数据.
1)振动测量.电动机振动由两个传感器RCP106MV和107MV检测.传感器放置在电动机壳体下法兰上,其中两个传感器,一个测量水平振动,另一个测量垂直振动.
2)轴位移测量.泵的轴偏移由两个传感器RCP150MM和RCP151MM检测,传感器置于电动机驱动联轴节高度上,其中两个传感器,一个测量水平偏移,另一个测量垂直偏移.
3)温度测量.温度由电动机上、下轴承和止推轴承上、下轴瓦温度探测器RCP114至119MT检测及电动机定子绕组温度探测.
4)转速测量.在泵体上安装两个可变磁阻传感器RCP140MC和141MC测量泵转速,检测电动机轴上短轴部位销钉运动,轴每转一圈发出一个脉冲信号.

表1 秦山核电站主泵热工参量
由主控台采集主泵轴承温度传感器TS、泵转速传感器SS、振动传感器VS和位移传感器DS等4种传感器监测主冷却剂泵状态,根据传感器提供的4种不同测量状态,由时基波形(振幅、频率、相位)和轴心轨迹综合确定基本概率函数赋值.将式(3)中的证据源数目设置为k=2,如图3所示,由传感器VS和传感器DS确定:m1(θ1)= 0.10,m1(θ2)=0.20,m1(θ3)=0.30,m1(θ1∩θ2)= 0.10,m1(θ1∩θ3)=0.10,m1(θ1∪θ2)=0.10,m1(θ1∪θ3)=0.10;由传感器TS和传感器SS确定:m2(θ1)=0.20,m2(θ2)=0.10,m2(θ3)=0.10,m2(θ1∩θ2)=0.20,m2(θ2∩θ3)=0.20,m2(θ1∪θ3)=0.20.
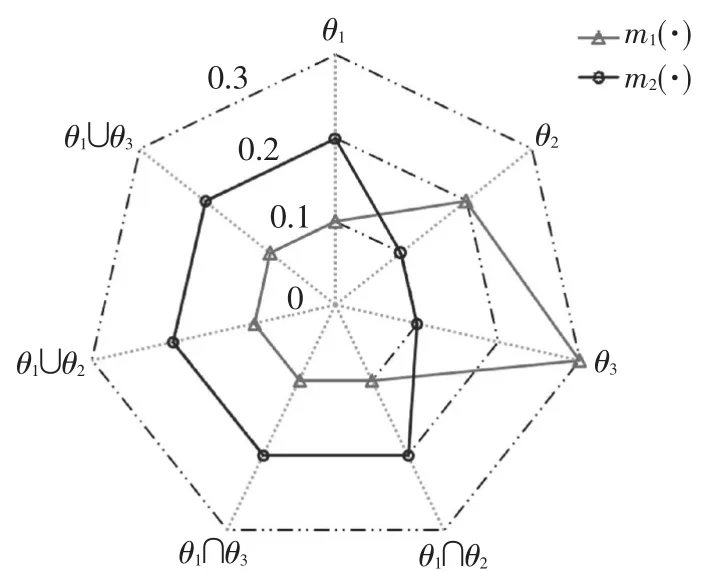
图3 证据源m1(A)和m2(A)的BPA
2.2 仿真结果与分析
根据核主泵自由DSm模型融合过程,经由式(1)可推导出:mMf(θ)(θ1)=0.08,mMf(θ)(θ2)= 0.03,mMf(θ)(θ3)=0.10,mMf(θ)(θ1∩θ2)=0.22,mMf(θ)(θ1∩θ3)=0.12,mMf(θ)(θ2∩θ3)=0.19,mMf(θ)(θ1∪θ3)=0.02,mMf(θ)(θ1∩θ2∩θ3)= 0.16,mMf(θ)((θ1∪θ2)∩θ3)=0.01,mMf(θ)((θ1∪θ3)∩θ2)=0.05,mMf(θ)((θ2∪θ3)∩θ1)=0.02.
根据核主泵混合DSm模型融合方法,对于∀A∈DΘ,有mM(Θ)(A)=δ(A)[S1(A)+S2(A)+ S3(A)],即式(2).当δ(A)=0时,S1(A)、S2(A)和S3(A)不需要计算;当δ(A)=1时,根据式(3)~(5)分别计算出S1(A)、S2(A)和S3(A)的数值分布,如图4所示的mM(Θ)(A)过程数值图,代入式(2)得出最终决策判断结果.其数值分别为: S1(θ1)=0.08,S1(θ2)=0.03,S1(θ3)=0.10,S1(θ1∩θ2)=0.22,S1(θ1∩θ3)=0.12,S1(θ2∩θ3)=0.19,S1(θ1∪θ3)=0.02,S1((θ2∩θ3)∪θ1)=0.02,S1((θ1∪θ2)∩θ3)=0.01,S1((θ1∪θ3)∩θ2)=0.05;S2((θ1∩θ2)∪θ3)=0.07,S2((θ1∩θ3)∪θ2)=0.01,S2((θ2∩θ3)∪θ1)= 0.02,S2((θ1∪θ2)∩θ3)=0.02,S2((θ1∪θ3)∩θ2)=0.02,S2((θ2∪θ3)∩θ1)=0.02.
将上述数值分别代入式(2)中,即核主泵混合DSm模型融合结果为:mM(θ)(θ1)=0.08,mM(θ)(θ2)=0.03,mM(θ)(θ3)=0.10,mM(θ)(θ1∩θ2)=0.22,mM(θ)(θ1∩θ3)=0.12,mM(θ)(θ2∩θ3)= 0.19,mM(θ)(θ1∪θ3)=0.02,mM(θ)(θ1∩θ2∩θ3)= 0,mM(θ)((θ1∪θ2)∩θ3)=0.03,mM(θ)((θ1∪θ3)∩θ2)=0.07,mM(θ)((θ2∪θ3)∩θ1)=0.02.
图5显示了核主泵自由DSm模型和混合DSm模型融合结果对比,图5中m′(·)表示核主泵自由DSm模型中的所有焦元,m(·)表示核主泵混合DSm模型中的所有焦元.从图5中可以看出,核主泵直接应用DSmT融合最终决策结果为θ1∩θ2,即表示有两种故障情况并发,对应为主冷却剂泵转子不平衡和转子不对中的并发故障.验证了本文所提出的核主泵DSmT并发故障融合算法在处理核主泵故障证据冲突问题时,与核仿真机实验工况相符.实验结果表明,该融合方法能够有效、准确地对核主泵多重并发冲突证据进行有效处理,对核动力装置并发故障领域进行了有益的探讨和研究.
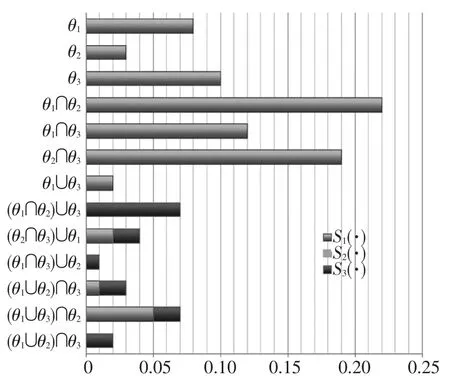
图4 S1(A)、S2(A)和S3(A)数值分布
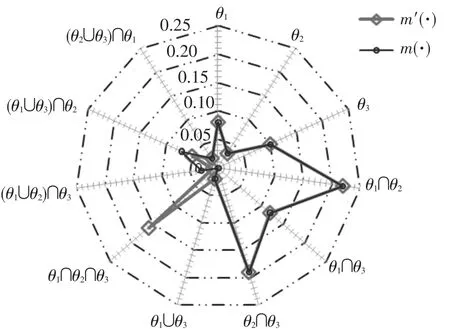
图5 自由DSm模型与混合DSm模型计算结果
3 结 论
1)核动力装置中主冷却剂泵是一个复杂的非线性系统,其故障形式呈多态性和隐蔽性,针对主冷却剂泵故障特征微弱难以有效辨识及DST仅能解决在无高冲突辨识框架下的单一故障诊断等问题,本文提出并验证了主冷却剂泵并发故障DSmT融合算法.
2)结合并发故障的特点,构建了基于DSmT给出涵盖单发和并发故障的融合模型,对定义的开放辨识框架约束了工程上核动力装置产生高度冲突存在的不合理现象,消除了与实际经验不符的并发故障情况,提高了决策速度.
3)对DSmT并发故障信息进行了实验分析,实验结果表明,提出的DSmT算法能够快速地给出主冷却剂泵的并发故障信息及预警,实现了主冷却剂泵的故障诊断和预测要求.虽然实验研究以主冷却剂泵并发故障诊断为例,但该方法具有推广价值,同样可应用到其他的工业设备或部件上.
4)对主冷却剂泵的DSmT并发故障诊断算法进行了初步实验,对于其他的大型工业设备,因其设备不同其故障机理也大行径庭,因而对于不同故障识别目标的辨识框架及BPA的合理取值均需进行进一步的分析和研究.
[1]夏虹,陈志辉,邓礼平,等.基于小波的突变信号识别方法及应用研究[J].原子能科学技术,2012,46(12):1451-1456.
[2]夏虹,黄华,陈志辉,等.基于频率补偿小波的屏蔽主泵裂纹转子识别[J].原子能科学技术,2010,44(7): 841-847.
[3]DEZERT J,SMARANDACHE F.On the generation of hyper-power sets for the DSmT[C]//Proceedings of the 6th International Conference on Information Fusion. Cairns,Australia:IEEE Xplore,2003:1119-1125.
[4]侯俊,苗壮,潘泉.DST与DSmT自适应融合算法[J].微电子学与计算机,2006,23(10):150-152.
[5]刘永阔,凌霜寒.DSmT与DST融合门限改进方法[J].计算机应用,2012,32(4):1037-1040.
[6]于小红,周庆军,李艳丽,等.DST与DSmT自适应融合算法研究[J].计算机与数字工程,2013,41(1):35-37.
[7]蒋海娜,文成林,徐晓滨,等.证据相关下的并发故障诊断方法[J].华中科技大学学报(自然科学版),2009,37(S1):94-97.
[8]AIROUCHE M,BENTABET L,ZELMAT M,et al. Pedestrian tracking using color,thermal and location cue measurements:a DSmT-based framework[J].Machine Vision and Applications,2012,23(5):999-1010.
[9]陈法法,汤宝平,姚金宝.基于DSmT与小波网络的齿轮箱早期故障融合诊断[J].振动与冲击,2013,32(9):40-45.
[10]翟旭升,胡金海,谢寿生,等.基于DSmT的航空发动机早期振动故障融合诊断方法[J].航空动力学报,2012,27(2):301-306.
[11]李植良,徐晓滨,文成林.基于扩展证据理论的并发故障诊断方法[J].杭州电子科技大学学报,2008,28(6):107-110.
(编辑张 红)
Concurrent fault information fusion methods ofmain coolant pum p based on DSm T
GUO Qing1,2,XIA Hong2,HANWenwei2
(1.Engineering Training Center,Harbin Engineering University,150001 Harbin,China;2.National Defense Key Subject Laboratory for Nuclear Safety and Simulation Technology,Harbin Engineering University,150001 Harbin,China)
Aiming at the problems that the faults of NPP’s main coolant pump are difficult to recognize effectively during their early phases,and that DST can only solve single fault diagnosis in the identification framework without serious conflict,this paper proposes a diagnosismodel formain coolant pump’s concurrent fault fusion in early phases,based on DSmT.Taking advantage of DSmT,multiple independent proofs are used to conduct fusion decision,and obtain the results ofmain pump fault and concurrent fault diagnosis.On the simulation machine of nuclear power plant,main coolant pump was simulated and verified,and the results show that this method can improve the accuracy of recognition ofmain pump’s current faults during early phases,and reduce the uncertainty of the diagnosis.
DSmT;fault identification;main coolant pump;information fusion
TL99
A
0367-6234(2014)09-0111-05
2014-03-12.
国家自然科学基金资助项目(51379046).
郭 清(1978—),女,博士研究生;夏 虹(1962—),女,教授,博士生导师.
郭 清,guoqing@hrbeu.edu.cn.
