一种改进相控阵雷达跟踪环路的方法
2014-06-23耿党辉
汤 兵 耿党辉
(南京电子技术研究所 南京 210039)
0 引言
相对于传统单脉冲雷达,相控阵雷达以电子方式控制波束方向,可以实现灵活的雷达能量调度方式,利用时空分割技术实时进行多目标的捕获与跟踪[1],工作效率高,应用灵活。
当相控阵雷达的阵面可以通过伺服驱动进行方位和俯仰机械轴转动时,可以实现全空域的多目标监测,用于精密跟踪测量的相控阵雷达通常采用这种设计。这种机相扫结合的相控阵雷达,通过机电轴联合跟踪控制,在对主目标实现CAT、预测引导、预测跟踪等多种法线跟踪方式的同时,可以灵活地对电扫空域内其它目标进行多目标电轴跟踪。
图1是这种联合跟踪控制系统示意框图。
在使用上述系统的雷达进行跟踪实验的过程中,发现在采用电轴跟踪或预测引导、预测跟踪等机电轴联合工作方式时,对远距离的目标跟踪没有CAT工作方式稳定,特别是在进行标校球跟踪实验时,CAT方式能够跟踪更远的距离而不丢失。

图1 机电轴联合跟踪系统框图
通过对雷达在不同工作方式下的处理控制流程的对比分析,发现之所以CAT方式更为稳定,是由于在这种方式下,雷达数据处理在进行法线跟踪方式控制时,是将原始量测的测角误差发送给伺服,由伺服完成角度跟踪闭环控制。因此,这种工作方式类似于传统的单脉冲跟踪,跟踪环路带宽主要由伺服驱动系统决定,通常不到1Hz,因而对量测噪声具备更好的抑制效果,而在其它跟踪方式下,由于引入了多目标跟踪滤波环节,天线位置是由数据处理根据主目标的跟踪外推值进行控制,伺服不再进行闭环控制。而通常数据处理跟踪滤波器要综合考虑滤波效果及目标机动,从等效带宽[2]上比较,对量测噪声的抑制通常不及伺服闭环跟踪。
基于以上分析,现考虑是否可以在上述系统中加入类似伺服的数字滤波环节,从而提高相控阵雷达在电轴跟踪远距离低信噪比目标时的跟踪稳定性。
1 噪声滤波算法与仿真
对于一个基本的二阶伺服控制模块,传递函数如下:

式中基本特性参数有两个:无阻尼固有频率ωn和阻尼系数ξ。
而阻尼振荡频率:

常用的3dB带宽:

为了对上述伺服环路进行数字模拟,必须将连续传递函数G(s)转换为离散传递函数,这里采用的是双线性变换法,它能从根本上消除频率混叠效应,且运算相对简单。经过变换并做归一化处理后有:

式中,k=fs/fn,为采样频率fs与固有频率fn之比。
利用上述算法实现了二阶低通数字滤波器,并设置不同特性参数,在验证了其幅相特性及阶跃响应特性的基础上,进行了模拟测试。图2为模拟速度1°/s、叠加 E=0°,σ =0.05°的正态分布的随机噪声后的方位量测,在经过fn=1.5Hz的数字噪声滤波器后的滤波效果。

图2 二阶低通数字滤波仿真
采用数字噪声滤波器能对随机噪声产生明显的抑制,图(a)中采用的是二阶巴特沃思数字低通[3],其阻尼系数为,这样做的好处是不会产生明显的阶跃响应振荡,但滤波输出有一定的滞后,图(b)中由于设置了较小的阻尼系数,对输入没有产生明显固定滞后,但当目标机动时,将同样产生动态滞后。
2 多目标噪声滤波分析与设计
雷达对目标的检测是在阵面极坐标系下进行的,通过对接收波束的和通道、方位差、俯仰差通道的测距与测角处理,得到目标的RAE三维量测信息。由于受电波环境、雷达系统自身的影响,获取的RAE量测值是实际量测与量测噪声的叠加,随机噪声在其中普遍存在。
另一方面,对于目标的实际运动,必定受动力特性的限制,其运动轨迹不可能产生像叠加了随机噪声的测量轨迹那样,包含有较大的高频成分,出现反复起伏。也正因此,才有了跟踪滤波器的存在依据,其基于特定的目标运动模型,用滤波的方法进行目标运动参数估计。但是,为了能较好地与目标运动模型匹配,跟踪滤波可能会在非测量坐标系下进行,这样就必须将RAE下的量测值经坐标变换后再输入到跟踪滤波器,由于坐标变换的非线性、交叉性,如果不利用雷达接收通道自身的非相关性进行量测值预滤波,会影响跟踪滤波器参数的选取,导致参数估计及跟踪精度下降,特别是在低信噪比的情况下,还易产生航迹起始困难和目标跟踪丢失。即便跟踪滤波器的运动估计是在RAE下描述的,利用通道量测噪声的独立性进行噪声预滤波也是有利的。
基于以上分析,可以考虑在跟踪滤波器前增加如图3所示的前置数字噪声滤波环节。

图3 加入前置噪声滤波器
噪声滤波前置在航迹滤波前,点迹航迹相关之后。考虑到相控阵雷达进行多目标测量时,通道噪声与不同目标的距离及反射特性相关,因而对每一个目标设置了独立的RAE三维数字噪声滤波器,从而可以对不同目标及不同通道设置不同的带宽,更好地抑制随机噪声。
实际应用中,考虑到使用的双线性变换会有一定的频率失真,对二阶系统,要求采样频率最好是系统固有频率的15倍,以保证频率失真足够小[4]。实际应用的机相扫雷达PRF接近600Hz,2脉冲驻留,通常4目标,最多10目标,由此目标跟踪数据率通常有75Hz,最低也有30Hz,系统中增加的前置通道噪声滤波带宽可以设置在1Hz~2Hz。通过实际校飞实验,雷达在电轴跟踪远距离低信噪比目标时的跟踪稳定性明显提高,在电轴跟踪的各种工作方式下获得了与CAT法线跟踪方式基本一致的跟踪精度。
3 系统动态滞后补偿
由于在雷达数据处理中增加了前置噪声滤波环节,加之雷达系统的伺服环节,从而在跟踪环路中带来二阶系统不可避免的相位延时,这在跟踪高机动目标时会产生较为明显的动态滞后。
如果将目标的运动在雷达RAE测量坐标系下对时间的参量方程描述,并将其分别转换至频域分析,则对于不同运动特性的目标轨迹,会有不同的频域分布,在经过各自通道的二阶环节后,按其幅频特性和相频特性而产生相应的输出,这时再从时域上观察,输出轨迹曲线相对于输入的滞后量是随着目标机动而变化的。在相控阵体制的精密测量雷达中,相对于目标机动,雷达的测量数据率一般足够高,关键是抑制随机噪声对目标运动估计的影响,从而提高跟踪控制及测量精度,而通道噪声滤波造成的动态滞后可以通过引入一定的前馈量进行补偿。
为了克服跟踪过程中的动态滞后效应,可以在控制外推时加入带反馈环节的前馈环路。同时,为了适应目标机动时动态滞后量的变化(包括超前,这可认为是负的滞后量)的情况,有必要在机动检测的基础上进行前馈量的自适应调整。图4即为加入了自适应前馈功能的改进系统框图。

图4 改进系统框图
从滤波运动估计的角度出发,滞后可以认为是由于目标实际运动相对滤波运动模型的机动,而在实际中我们只能通过量测来获知目标的运动,下一次跟踪控制(波门和波位控制)则是基于目标的最新运动估计,因此可以通过跟踪残差(量测值与跟踪控制值的差)来进行目标机动检测。实际应用中机动检测还要考虑量测噪声的影响,因而采用了对跟踪残差的实时滑窗统计来检测跟踪过程中的动态滞后,综合目标运动信息,即可按一定的反馈系数对前馈量进行调整。如果目标速度不是正向,而是负向的,则当跟踪残差的滑窗统计均值为正值时,说明波束是超前目标的,应减小前馈。
滑窗宽度越窄,反馈系数越大,调整得就越快速,这在跟踪高机动目标时有利;但同时,闭合得快并不代表就有好的收敛性,因为这时更易引入较大的量测噪声,从而出现振荡,甚至发散。因此对系统中滑窗宽度及反馈系数的选取必须权衡这两方面的影响[5],综合选取,并经过仿真实验确认。系统中前馈模块除实时接收机动检测模块的反馈结果外,还要判断目标主副状态及伺服跟踪方式,自动响应伺服工作方式的切换调整。这点是与我们先前应用于单脉冲雷达的同轴跟踪系统的主要区别。
图5是设置模拟目标,对改进前后系统进行的跟踪对比试验结果,条件如下:
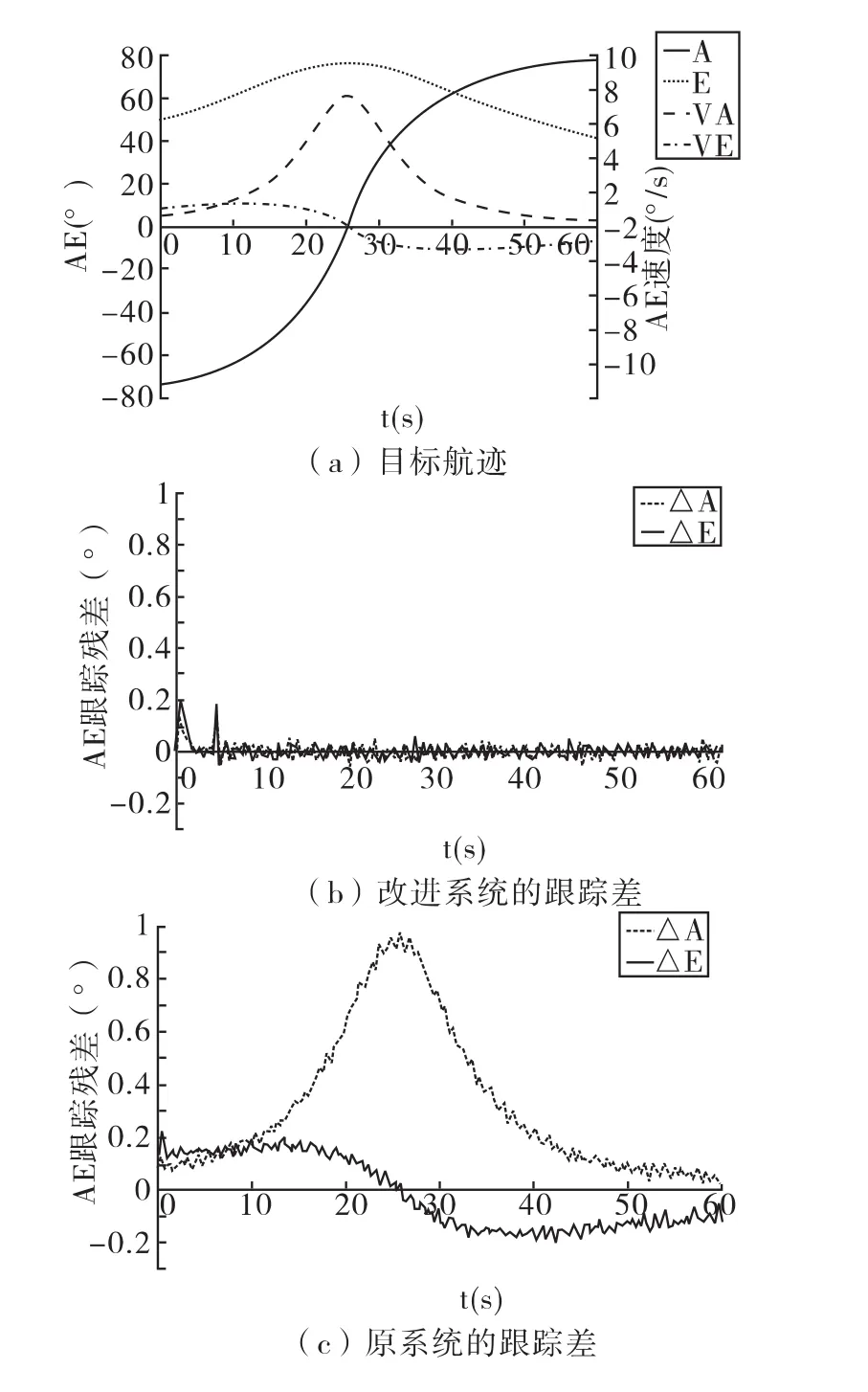
图5 跟踪对比试验
a.模拟以3km/s速度飞行的过捷径目标,目标方位及俯仰位置及速度曲线如图5(a)所示;
b.角度量测噪声:正态随机分布,E=0°,σ=0.04°;
c.雷达参数:法线跟踪,数据率50Hz;伺服特性:fn=1.5Hz,ξ=0.4;
d.改进系统主要参数:1.5Hz噪声滤波器;自适应前馈。
由以上结果可见,原系统在法线跟踪过捷径目标时,在角度上产生了明显的动态滞后,而利用改进后系统,目标在过捷径时的角度跟踪残差得到了较好的控制,对动态滞后的抑制效果明显,提高了系统对过捷径目标的跟踪能力和测量精度。
4 结束语
理论上,对量测噪声的抑制可以通过航迹滤波器的优化设计及滤波参数的调整实现,本文从减小系统复杂性、增加工程实现性角度出发,在机相扫雷达数据处理与控制软件的设计中,通过在航迹滤波前增加前置数字噪声滤波器,实现了滤波带宽可控的多目标RAE通道独立噪声滤波,抑制了由于坐标变换带来的量测噪声交叉耦合对航迹滤波的影响,提高了雷达对远距离低信噪比目标的电轴跟踪稳定性。同时,通过引入用于同轴跟踪系统的自适应前馈补偿技术,明显提高了雷达在法线跟踪方式下对机动和过捷径目标的跟踪能力和测量精度。
系统改进完全由软件实现,通过仿真实验及在机相扫测量雷达中的实际应用,取得了较好效果。对于一些远程预警相控阵雷达,由于作用距离远、同时跟踪目标数多,通常只能采用低重复频率和低跟踪数据率,会导致频率失真及反馈滞后,因而限制了在这类雷达中的应用。
[1]张光义,赵玉洁.相控阵雷达系统[M].北京:电子工业出版社,2006,12.
[2]王建卫,周敬烈,等.α,β,γ滤波器的等效带宽[J].现代雷达,2008,30(3):44-46.
[3]王世一.数字信号处理[M].北京:北京理工大学出版社,1997.
[4] 刘正士,汪小龙,等.双线性变换中的频率失真[J].振动工程学报,2002,15(1):102-105.
[5] 王大军,汤兵,等.一种同轴跟踪系统的自适应前馈方法[J].现代雷达,2006,28(7):21-23.
