基于有限差分扩展卡尔曼滤波的锂离子电池SOC估计
2014-06-22刘艳莉朱乐为
刘艳莉 戴 胜 程 泽 朱乐为
(天津大学电气与自动化工程学院 天津 300072)
1 引言
为了应对能源危机,减缓全球气候变暖,许多国家都开始重视节能减排和发展低碳经济。电动汽车因为采用电力进行驱动,可以降低二氧化碳的排放量甚至实现零排放,所以得到各国的重视而迅速发展。
随着电动汽车的发展,电池管理系统(Battery Management System,BMS)得到了广泛应用。为了充分发挥电池系统的动力性能,提高其使用的安全性、防止电池过充过放,延长电池的使用寿命,优化驾驶和提高电动汽车的使用性能,需要 BMS对电池的荷电状态(State of Charge,SOC)进行准确估计。电池的SOC是指电池目前所存储的能量,作用与燃油汽车系统中的油量表类似。但是,由于锂离子电池结构复杂,电池的荷电状态受工作电流、电池内阻及其周围的环境温度、自放电和老化等因素的影响,使得SOC的估算困难[1]。
目前,对单体电池SOC估计的主要方法有开路电压法和安时积分法。文献[2]介绍的开路电压法是利用电池的开路电压与SOC之间的对应关系,通过测量电池的开路电压来估计SOC。开路电压法简单易行,但是需要静置较长时间才能得到稳定的开路电压值,只适应于电池电流非剧烈变化状态下的SOC估计,不能满足在线检测要求。文献[3]应用了目前电动汽车最常使用的安时积分法,它是通过负载电流的积分估计SOC,简单易用,但它存在不能自动确定SOC初值和有很大的累积误差的问题。
为了达到更高的SOC估计精度,目前国内外的研究主要集中在智能算法的应用,如神经网络法、卡尔曼滤波法等。神经网络法在建好模型的前提下,依靠大量的样本进行数据训练可以得到较好的精度,但是这种方法对训练方法和训练数据的依赖性很大,目前还没有得到很好的应用[4]。卡尔曼滤波法根据采集到的电压电流,由递推算法得到SOC的最小方差估计,解决SOC初值估计不准和误差累计的问题,但是它仅用于线性系统[5]。采用线性系统对电池进行建模得到的 SOC估计精度必定受到限制。这一问题的解决办法之一是采用扩展卡尔曼滤波(Extended Kalman Filter,EKF)[6]来进行SOC的估计,但EKF为了求取估计误差方差通过非线性函数的传播,需将非线性函数用Taylor级数展开并线性化,在该过程中忽略了高阶项,必定会引起误差。
本文提出了卡尔曼滤波的另一种非线性化方法——有限差分扩展卡尔曼滤波(Finite Difference Extended Kalman Filter,FDEKF)法,并将此方法应用到电池SOC估计中。利用有限差分方法[7]代替EKF算法中非线性函数的偏导运算,其精度高于Taylor级数的一阶展开,而且充分利用了由模型线性化产生的有效误差信息,具有较强的鲁棒性。本文建立了进行动力电池SOC估计的模型,给出了针对该模型利用FDEKF进行电池SOC估计的关键步骤和算法,并通过实验对算法的估计精度、复杂度及鲁棒性进行了验证。
2 锂离子电池等效模型与参数辨识
2.1 锂离子电池模型
电池模型的种类很多,如电化学模型、等效电路模型、神经网络模型等,在文献[8]中给出了很好的总结。电化学模型[9]基于电化学理论采用数学方法描述电池内部的反应过程,能够全面描述电池反应的动态特性,但是电化学模型要求已知电池的化学参数、结构参数甚至材料特性等,而这些参数很难得到,因此电化学模型难以应用到电动汽车仿真与建模中,一般仅用于电池性能分析与设计中。神经网络模型[10]具有自学习能力,并且能够模拟电池充放电过程的非线性特性,已广泛应用于各种电池系统的建模仿真中。但神经网络方法受训练数据和训练方法的影响很大,而且经此数据训练的神经网络模型只能在原训练数据的范围内使用,因此神经网络模型更适用于批量生产的成熟产品。等效电路模型结构简单,物理意义清晰,能够用数学模型解析表达,便于参数辨识,在目前的研究中得到了广泛应用。
目前被广泛应用于电动车辆仿真的电池等效电路模型主要有 Rint模型[11]、Thevenin 模型[12]、PNGV模型[13]和多阶动力学模型[14]等。前3个模型结构简单,但难以准确反映电池的动态特性;多阶模型可以达到很高的精度,但随着阶数的增高,计算量也相应增大,难以实际应用。综合考虑模型精度、复杂度以及实验选用的LiFePO4,本文采用图1所示的二阶RC等效电路模型。

图1 二阶RC等效电路模型Fig.1 Equivalent circuit of second-order RC model
图中,Uoc表示开路电压(Open Circuit Voltage,OCV),Ut为端电压,It为端电流;R0为欧姆内阻;Re、Ce和Rd、Cd用来描述电池的极化效应。由于锂离子电池工作的物理化学过程相当复杂,要描述清楚也相当困难,因而,可以大致地把锂离子的运动分成在电极间的传输过程与在电极上的扩散过程两个部分。
2.2 辨识方法
为了建立一个准确的电池模型,需要对模型中的未知参数进行辨识[15]。目前常用的锂离子电池参数估计的方法有脉冲放电法[16]、最小二乘法[17]等。
脉冲放电方法适合离线估计模型参数的初始值,其基本方法是将电池静置较长一段时间后,让电池以恒定电流放电一段时间,并记录下电池的电压响应,然后根据电压和电流计算模型的参数。其计算简单容易实现,但只能用于离线的参数估计,具有一定的局限性。
最小二乘法是一种古老的数据处理方法,在辨识和参数估计领域中,最小二乘法已经是一种基本的重要估计方法,许多用于系统辨识的估计算法也往往可以解释为最小二乘法。
假设被辨识系统差分方程的最小二乘法形式为

式中,y(k)为系统输出量的第 k次观测值;H为观测向量,HT(k)=[-y(k-1)…-y(k-n) u(k)…u(k-n)];u(k)为系统的第 k次输入值;θ为被辨识的参数,θ=[α1…αnβ0β1…βn];e(k)为均值零噪声。
取准则函数


上面给出了最小二乘一次完成算法,但具体使用时不仅占用内存大,而且不能用于在线辨识,解决这个问题的方法是把它转化为递推算法。
递推最小二乘法的基本思想是新估计值ˆ(1)k+θ是在旧估计值ˆ()kθ的基础上,利用新观测数据对老估计值ˆ()kθ进行修正得到的。递推最小二乘法无需存储全部数据,取得一组观测数据,便可估计一次参数,因此所需的计算量和占用的存储空间都很小,而且能够实现在线实时辨识。这样,随着观测数据的逐次引入,一次接一次地进行参数估计,直到参数估计值达到满意的精确度为止。
递推最小二乘法递推公式[18]为
式中,K(k)为增益因子;P(k)是第k次测量的协方差阵。
2.3 参数辨识
在图1所示电池模型中,系统输入是端电流It,输出U为开路电压Uoc与端电压Ut之差,由基尔霍夫定律与拉普拉斯变换导出频域算式

将式(5)展开后,转化为差分方程可得

对式(6)整理,令θ=[α1α2β0β1β2]T,HT(k)=[-U(k-1)-U(k-2) I(k) I(k-1) I(k-2)],得到最小二乘法的形式

然后利用递推式(4)可求出 α1、α2、β0、β1和β2的值。
3 锂离子电池的SOC估计
3.1 基于扩展卡尔曼滤波的SOC估计
图1所示电池模型以荷电状态SOC、两电容上的电压Ue、Ud为状态变量,端电流It为输入量,端电压Ut为输出量,模型离散化后的状态方程和观测方程分别为式(8)、式(9)
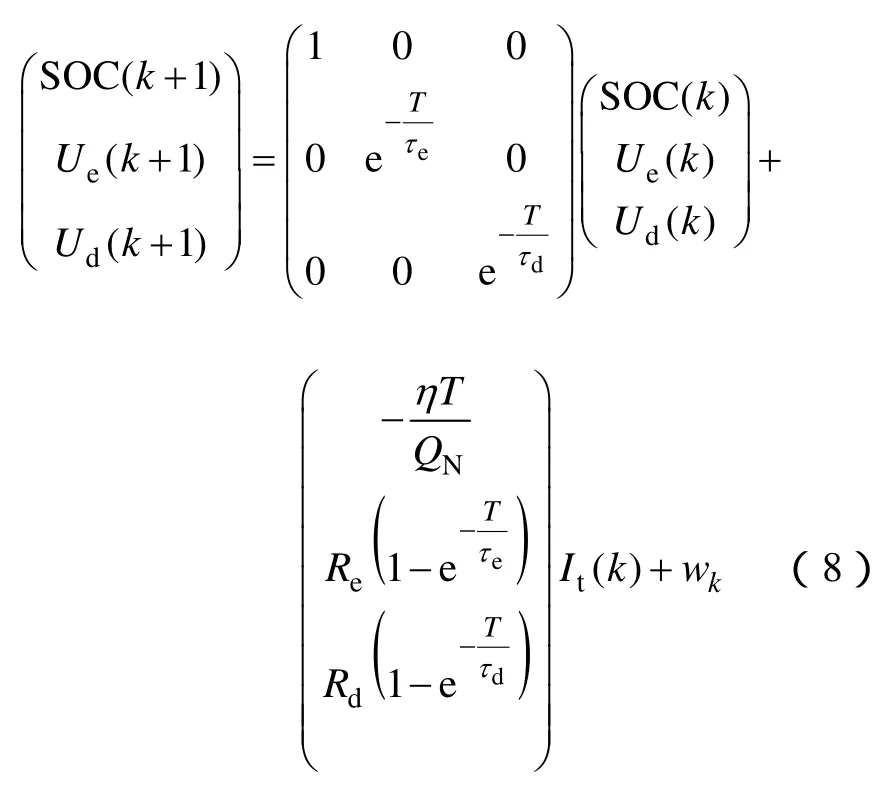

式中,η为库仑效率[19],可以通过电池充放电实验得到;QN为电池额定容量;T为采样周期;τe、τd是RC网络的时间常数,且τe=ReCe,τd=RdCd;It(k)为k时刻的电流,本文中,充电时It(k)<0,放电时It(k)>0;wk和 νk是互不相关的高斯白噪声,且假设有如下统计学特性

式中,Qk、Rk都为正定对称阵;δkj为 Kronecker-δ函数。
电池开路电压OCV与SOC存在一一对应的关系,用Uoc(SOC(k))表示该关系,该关系可以通过实验得到(见图2)。
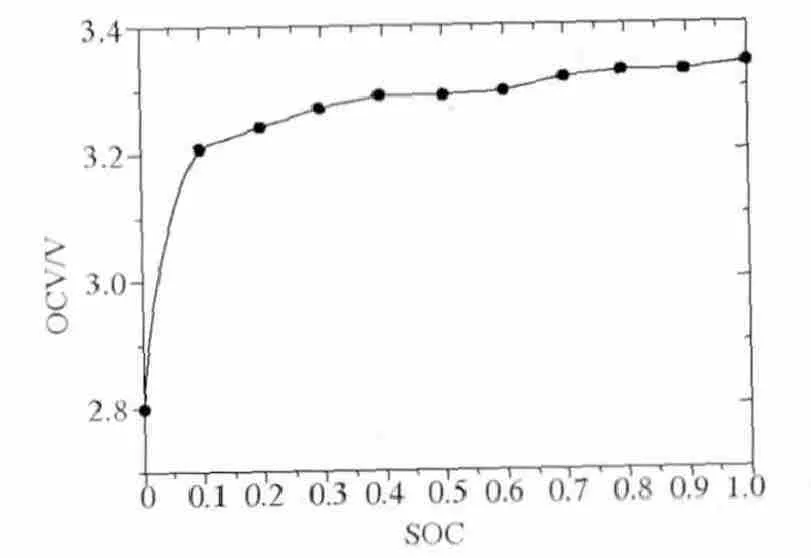
图2 OCV-SOC关系曲线Fig.2 OCV-SOC curve
由于 OCV-SOC呈非线性关系,因此模型是非线性的,本文无法直接使用卡尔曼滤波来进行系统状态的估计。一种常用方法是将它们用Taylor级数进行展开,并取其一阶线性量对原函数进行线性近似后再采用卡尔曼滤波进行估计,具体步骤如下:
令xk=[SOC(k) Ue(k) Ud(k)],上标“ ̄”表示验前估计,符号“^”表示验后估计。对状态方程式(8)和观测方程式(9)线性化处理,即围绕 ˆkx进行泰勒级数展开,略去二次以上项。

初始化

循环递推计算

3.2 基于有限差分扩展卡尔曼滤波的SOC估计
扩展卡尔曼滤波在状态估计过程中,存在两个缺点:①当非线性函数的Taylor展开式高阶项无法忽略时,线性化会使系统产生较大误差,甚至使滤波器不稳定。②在每个滤波周期需要计算 Jacobian矩阵,对于复杂系统,将大大增加滤波估计的运算量。有限差分扩展卡尔曼滤波则是另一种迭代型最小方均差误差估计器,它应用有限差分代替非线性函数的偏导数计算,其精度高于Taylor级数的一阶展开。
有限差分的思想最早由 Schei[20]提出,该算法的理论基础是,采用多项式近似技术和一阶中心差分法计算非线性函数的偏导数,它具有一阶非线性函数近似的能力。设非线性函数y=f(x),则其在x =处的一阶有限中心差分展开为

式(17)用Taylor级数展开后为
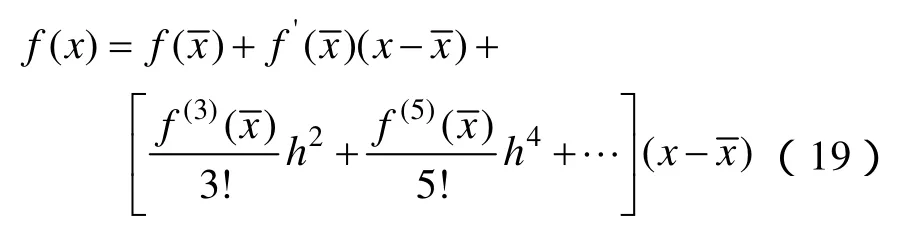
比较式(18)和式(19)可以看出,式(19)右边的前2项与一阶Taylor展开式相同,后1项对应高阶项,其精度由h控制。显然,用中心差分代替一阶导数得到展开式的精度高于一般一阶 Taylor级数的精度,而且适用于不同非线性函数。有限差分扩展卡尔曼滤波的实现如下:
对 Qk,Rk,(验前状态方差),(验后状态方差)进行Cholesky分解,有

利用一阶中心差分计算非线性函数偏导数,即



(1)验前方差估计为

(2)验后增益矩阵和方差估计为

那么,式(24)~式(26)替换EKF算法流程中的式(13)、式(14)、式(16),即组成 FDEKF算法。
从上述推导过程来看,验前方差、验后方差和验后增益矩阵的计算,综合考虑了过程噪声的影响和模型线性化误差的影响 。因此,应用有限差分对EKF的改进,可以增加算法的精确性和鲁棒性。
4 实验分析
本文测试选用的电池是天津力神公司生产的磷酸铁锂动力电池LP2770102AC,电池的标称电压为3.3V,标称容量为12.5A·h。测试是在Digatron动力电池测试系统上进行,为验证算法的性能,设计了脉冲放电,用来估算模型参数和验证SOC算法的精度。
4.1 模型验证
实验具体实现如下:将电池组充满电(SOC(0)=100%),在恒温条件下(20℃±2℃)对电池组进行脉冲放电(4.17A放电18min,静置60min),整个放电过程时长 780min,采样间隔为 1s。图3为实验过程中采集的端电流和端电压。
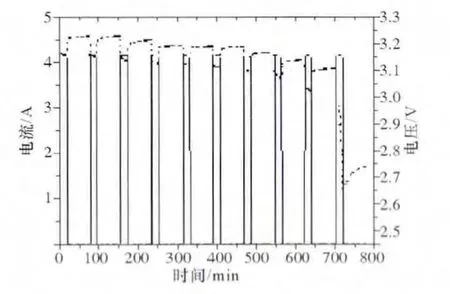
图3 脉冲放电端电流/电压波形Fig.3 Terminal current/voltage curves by pulse discharge
为了研究递推最小二乘法的辨识结果,本文对图3所示的脉冲放电工况进行辨识,参数辨识结果如图4所示。为真实反映电池动态特性,在Matlab/Simscape中搭建如图5所示的等效电路模型,将电流加载到模型上得到仿真电压。图6是根据估计的仿真电压和实测电压比较曲线,从图6中可以看出,在 692min以前,等效电路模型可以准确反映锂离子电池实际的动态特性,误差在20mV以内。在最后一个放电区间(SOC<0.1),电池实际电压剧烈跌落,从参数辨识曲线可以看出,极化电容Ce、Cd均剧烈变化,模型仿真电压与实测电压也存在较大误差(200mV)。

图4 参数辨识曲线Fig.4 Parameters identification curve
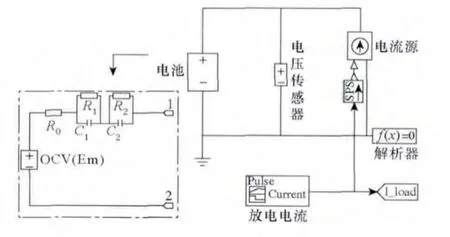
图5 Simscape等效电路模型Fig.5 Equivalent circuit of simscape model
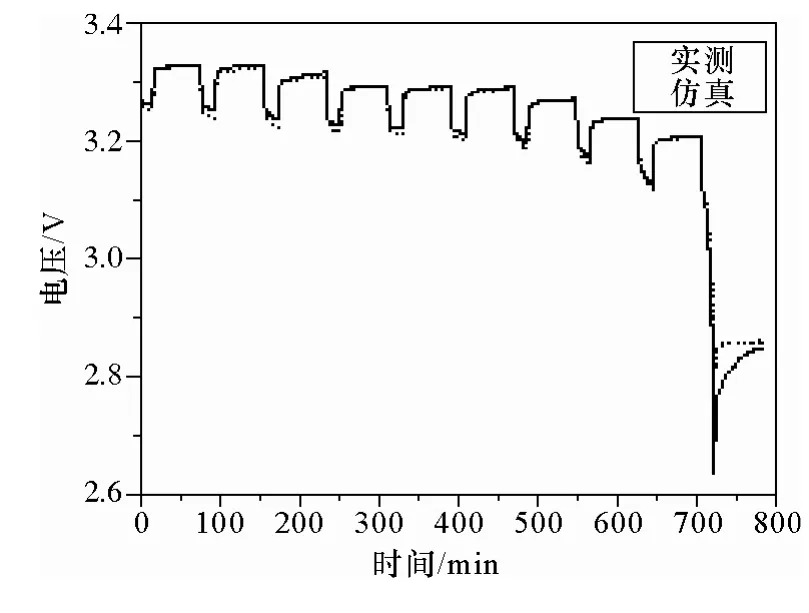
图6 端电压曲线Fig.6 Terminal voltage curve
4.2 算法验证
分别采用扩展卡尔曼滤波和有限差分扩展卡尔曼滤波估计电池SOC,实验结果如图7所示。

图7 脉冲放电下的SOC估计及误差曲线Fig.7 Comparison of SOC estimation and error curve by pulse discharge with same current
为了定量的比较EKF和FDEKF的性能,分别定义方均根误差和算法的平均耗时为

式中,T表示一次实验的时间步长;ˆkx表示状态SOC的第k步的估计值;xk表示状态SOC的第k步的真实值;为第k步实验算法耗时时间。
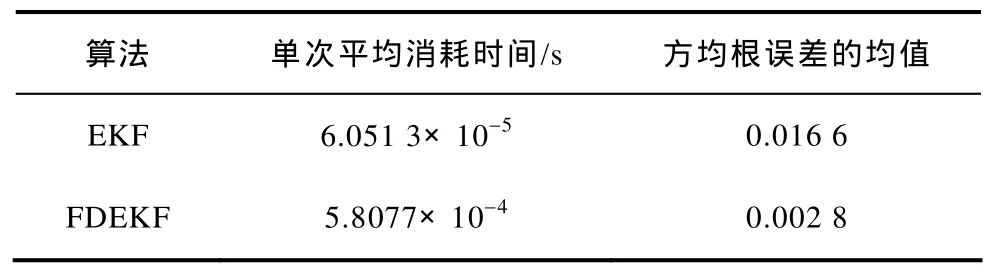
表 SOC估计比较Tab.Comparison of SOC estimation
通过图7可以看出,在模型较为准确时(0.1<SOC<1),此时EKF算法和 FDEKF算法均能较好的估算电池SOC,其中EKF算法的最大误差为6%,而FDEKF算法的最大误差为2%,说明FDEKF算法精度高于EKF算法。而在电池SOC<0.1时,电池等效模型存在一定偏差,此时 FDEKF算法仍能准确跟踪实际值,但 EKF算法在模型失效时的 SOC估计值存在较大偏差,说明 FDEKF具有较好的鲁棒性。表1全面比较了EKF算法和FDEKF算法的性能,FDEKF算法无论是平均耗时还是均方根误差上,均优于EKF算法。
5 结论
本文采用了等效电路模型对锂离子电池进行建模分析,并使用了递推最小二乘法辨识模型参数;研究了基于有限差分扩展卡尔曼滤波的电池 SOC估计方法。实验分析表明,采用 FDEKF算法,有利于提高动力电池SOC估计精度,且在模型存在误差时有较好的鲁棒性。
[1] 张剑波,卢兰光,李哲.车用动力电池系统的关键技术与学科前沿[J].汽车安全与节能学报,2012(2):87-104.Zhang Jianbo,Lu Languang,Li Zhe.Key technologies and fundamental academic issues for traction battery systems[J].Journal of Automotive Safety and Energy,2012(2): 87-104.
[2] 林成涛,王军平,陈全世.电动汽车 SOC估计方法原理与应用[J].电池,2004(5): 376-378.Lin Chengtao,Wang Junping,Chen Quanshi.Methods for state of charge estimation of EV batteries and their application[J].Battery,2004(5): 376-378.
[3] 齐国光,李建民,郏航,等.电动汽车电量计量技术的研究[J].清华大学学报(自然科学版),1997(3):47-50.Qi Guoguang,Li Jianming,Jia Hanget al.Research on the power measurement technology for electric vehicle[J].Journal of Tsinghua University(Science &Technology),1997(3): 47-50.
[4] 尹安东,张万兴,赵韩,等.基于神经网络的磷酸铁锂电池 SOC预测研究[J].电子测量与仪器学报,2011(5): 433-437.Yin Andong,Zhang Wanxing,Zhao Han,et al.Research on estimation for SOC of LiFePO4 Li-ion battery based on neural network[J].Journal of Electronic Measurement and Instrument,2011(5):433-437.
[5] Piller Sabine,Perrin Marion,Jossen Andreas.Methods for state of charge determination and their applications[J].Journal of Power Sources,2001,96(1): 113-120.
[6] 夏超英,张术,孙宏涛.基于推广卡尔曼滤波算法的SOC估算策略[J].电源技术,2007(5): 414-417.Xia Chaoying,ZhangShu,Sun Hongtao.A strategy of estimating state of charge based on extended Kalman filter[J].Power Technology,2007(5): 414-417.
[7] Rulkov Nikolai F,Sushchik Mikhail M,Tsimring Lev S,et al.Generalized synchronization of chaos in directionally coupled chaotic systems[J].Physical Review E,1995,51(2): 980-994.
[8] 陈全世,林成涛.电动汽车用电池性能模型研究综述[J].汽车技术,2005(3): 1-5.Chen Quanshi,Lin Chengtao.Summarization of studies on performance models of battery for electric vehicle[J].Automotive Technology,2005(3): 1-5.
[9] Di Domenico,Domenico,Giovanni Fiengo.Lithiumion battery state of charge estimation with a Kalman filter based on a electrochemical model[C].IEEE International Conference on Control Applications(CCA),2008: 702-707.
[10] Fang Kaizheng,Mu Daobin,Chen Shi,et al.A prediction model based on artificial neural network for surface temperature simulation of nickel–metal hydride battery during charging[J].Journal of Power Sources,2012,208(0): 378-382.
[11] Johnson V H.Battery performance models in advisor[J].Journal of Power Sources,2002,110(2):321-329.
[12] He Hongwen,Xiong Rui,Zhang Xiaowei,et al.State-of-charge estimation of the lithium-ion battery using an adaptive extended kalman filter based on an improved thevenin model[J].IEEE Transactions on Vehicular Technology,2011,60(4): 1461-1469.
[13] Gao Wengen,Jiang Ming,Hou Youming.Research on PNGV model parameter identification of LiFePO4 li-ion battery based on fmrls[Z].2011: 2294-2297.
[14] Kroeze,Ryan Carter,Krein Philip T.Electrical battery model for use in dynamic electric vehicle simulations[C].IEEE Power Electronics Specialists Conference,2008: 1336-1342.
[15] Bambach M,Heinkenschloss M,HERTY M.A method for model identification and parameter estimation[J].Inverse Problems,2013,29(2): 25009.
[16] 田甜,李孝尊,李红梅.磷酸铁锂电池的改进建模及 SOC估计[J].合肥工业大学学报(自然科学版),2012(9): 1192-1195.Tian Tian,Li Xiaozun,Li Hongmei.Modified modeling and SOC estimation of LiFePO4 Li-ion battery[J].Journal of Hefei University Of Technology(Natural Science).2012(9): 1192-1195.
[17] Zhong Muda,Jiang Jiuchun.Wavelet-based identification method of li-ion battery model for electric vehicles[Z].2013: 1529-1532.
[18] Hu Yuanbiao.Iterative and recursive least squares estimation algorithms for moving average systems[J].Simulation Modeling Practice and Theory,2013,34(0): 12-19.
[19] 黄文华,韩晓东,陈全世.电动汽车 SOC估计算法与电池管理系统的研究[J].汽车工程,2007(3):198-202.Huang Wenhua,Han Xiadong,Chen Quanshi.A study on soc estimation algorithm and battery management system for electric vehicle[J].Automotive Engineering,2007(3): 198-202.
[20] Tor Steinar Schei.A finite-difference method for linearization in nonlinear estimation algorithms[J].Automatica,1997,33(11): 2053-2058.
