通过小信号环路估计DC-DC开关变换器的大信号稳定区域预测
2014-06-22刘宿城周雒维卢伟国
刘宿城 周雒维 卢伟国 毕 凯
(重庆大学输配电装备及系统安全与新技术国家重点实验室 重庆 400044)
1 引言
开关功率变换系统本质上是一类特殊的强非线性系统,从数学描述上表现为右边非连续的分段化线性状态方程[1]。当开关频率远高于系统的截止频率和扰动频率时,可通过状态平均化的思想忽略高频分量,建立系统的低频小信号动态模型,借助线性系统理论工具(Bode图,Nyquist曲线,根轨迹等),以此进行控制系统的分析与综合[2]。然而,小信号模型虽能准确描述系统在小信号低频扰动下的响应特性,却无法准确反应系统的大信号(如起动过程、负载突变等)行为,甚至小信号稳定设计的变换器在大信号扰动下会出现失稳现象[3,4]。
对于一个闭环反馈控制系统来说,稳定性是其基本要求。大信号稳定性研究的是系统在大扰动情况下(如电压突变、负载切换、控制器饱和甚至系统结构的变化)的收敛行为。现有研究大信号稳定性最简单也最常见的方法是时域仿真法,其机理是对描述变换器动态行为的非线性微分方程进行数值求解。由于电力电子系统中负荷和开关过程的时间常数相差非常大,造成这种病态系统的计算时间较长。虽然通过先进的建模手段和仿真算法可以缩短仿真时间[5-7],但是时域仿真得到的结果物理意义不清晰,对设计的指导作用不够明显。另一方面,解析法中具有代表性的有雅可比矩阵求解法[8]、虚拟平衡点法[3]以及Lyapunov法[11]等。雅可比矩阵求解法与虚拟平衡点法均从系统的大信号状态方程出发,以反馈系数组成占空比的约束表达式,然后通过求解系统的雅可比矩阵或是直接求解状态方程,以此确定系统参数在大信号变化下的稳定边界。而对稳定区域与控制参数的解析分析方面,通常将控制器简化为纯比例结构,侧重于反馈增益的取值对稳定区域的影响[3,9,10]。与前述两种解析法不同,Lyapunov稳定性理论是衡量动态系统稳定性的一般性基础理论,目前已被广泛用于电力电子系统的稳定性分析与控制器设计[12-16]。基于Lyapunov直接法,根据系统的本质特性构建合适的Lyapunov能量泛函,可以估计系统平衡点的收敛区域。由于Lyapunov函数的非唯一性,不同 Lyapunov函数得到的收敛区域也会不同[17],针对特定系统建立最优Lyapunov函数尚存挑战。
本文提出从 DC-DC开关变换器的大信号扰动模型出发,借助范数不等式推导出变换器的充分稳定条件,建立起小信号环路增益与大信号稳定性之间的关系,并以此估计闭环系统的稳定区域。文中以Boost变换器为例,说明该方法的推导过程,并以仿真和实验结果验证方法的有效性。
2 Boost变换器的大信号扰动模型
图1为典型平均电流模式控制的Boost变换器原理框图。假设Boost变换器工作在电感电流连续导电模式,即开关功率管S与二极管VD互补工作,变换器可描述为如下分段线性状态方程组

式中,x为状态向量;A1,2、B1,2为系数矩阵;Ts为开关周期;d则代表占空比。

图1 典型Boost变换器Fig.1 Typical Boost converter
根据线性纹波近似法[2],上述分段线性方程组可近似描述为开关周期平均意义下的连续状态方程

将状态变量和控制变量看作为稳态值与扰动的叠加,即

式中,X和ˆx分别为状态变量的稳态量和扰动量;D和ˆd分别为占空比变量的稳态量和扰动量。
将式(3)代入式(2),整理得到

式中

注意到,式(4)中方程式右边由于存在控制输入(占空比)和状态变量的乘积,因此描述的是典型的双线性系统。
代入图1中的电路元器件和变量符号,可得到如下Boost变换器的状态方程

上述方程即对应图2所示的Boost变换器在大信号扰动下的电路模型。至此,在建模的过程中并未做小信号近似,因此该模型适用于大信号分析。值得一提的是,若忽略其中的双线性项,则可得到传统的小信号线性模型。

图2 Boost变换器的大信号扰动电路模型Fig.2 Large-signal perturbed circuit model of the Boost converter
为验证该模型的正确性,进行了电路仿真实验,其中 Boost电路的主要参数为:L=120μH,C=300μF,R=12Ω,RL=250mΩ,Vg=12V,VO=24V;仿真结果如图3所示,若忽略开关纹波分量,所建大信号模型与实际电路的瞬态响应基本一致。

图3 大信号模型验证结果Fig.3 Verification of the large-signal model
3 环路增益设计
在进行大信号分析之前,有必要先设计 Boost变换器的环路增益以确保系统的小信号控制性能。根据图1,可推导平均电流模式控制 Boost变换器的控制框图如图4所示。平均电流模式为双环控制结构:内环为电流环(控制器为Fi),起到对参考电流快速跟踪的作用;外环为电压环(控制器为Fv),其作用是为电流内环提供参考信号以控制输出期望电压值。双环控制结构相比单环控制具有更优越的动态性能,因此被广泛应用于高功率因数整流器以及高动态升压调节器中。

图4 平均电流控制Boost变换器的控制框图Fig.4 Control block diagram for the average-current mode controlled Boost converter
根据图4中控制结构框图,将电流内环等效为电压外环的一个独立子环节,那么等效后的电压外环路增益为

式中,电流环路增益 Ti(s)=RiFi(s)FmGid(s),Ri、Fi(s)、Fm和 Gid(s)分别为电流采样增益、电流控制器、PWM调制器增益和占空比到电感电流的传递函数;电压环路增益Tv(s)=βvFv(s)FmFi(s)Gvd(s),其中βv、Fv(s)和Gvd(s)分别为电压采样增益、电压控制器和控制到输出电压的传递函数。
这里,电流环和电压环的控制器均采用II型补偿器,即单零点-双极点补偿网络,其传递函数分别为

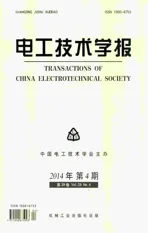
假设Boost变换器的额定功率为50W,其主电路参数见下表,那么相应电流补偿器和电压补偿器的设计参数分别为:ωi=9 627,ωiz=2 273,ωip=502 300,Ri=0.11,Fm=1/3.2;βv=0.208,ωv=5 895,ωvz=377,ωvp=256 800。补偿后的等效电压外环路增益如图5所示,其中图5a为仿真计算结果,图5b为借助频率响应分析仪(型号为Model 3120)进行电路实验测得的结果,二者基本吻合。从图中可以看出,等效电压环路增益 To(s)的截止频率为 1.2kHz,相位裕度和增益裕度分别为 80°和 7.5dB。另外,图5也表明,双环控制下的Boost变换器在低频段内的频域响应近似表现为一阶系统行为。

表 Boost变换器的主电路参数Tab.Parameters for the Boost power stage
图5 补偿后的等效外环路增益Fig.5 Compensated loop gains for the equivalent outer voltage loop
4 稳定区域估计
根据前述推导,Boost变换器的大信号扰动模型为双线性系统形式,而且传递函数模型中存在右半平面零点,使得基于小信号设计的 Boost变换器在大信号扰动下易于出现不稳定行为。本节将根据范数不等式确定变换器的充分稳定区域,并以此揭示小信号环路设计对稳定区域的影响。
由 Boost变换器的控制结构框图(见图3)可知,控制占空比有如下关系

式中,dz为输入扰动,代表电压外环的初始状态。
同时,根据式(5)可得出
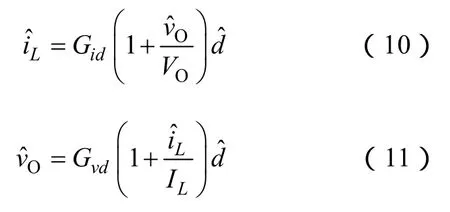
将式(10)与式(11)代入式(9)得到

将式(12)整理为

对式(13)应用范数三角不等式,然后整理得到如下关系

根据上式,闭环控制 Boost变换器达到稳定的充分条件是要求占空比表达式的分母为大于零的正数,即满足不等式

式(15)表明了 Boost变换器控制系统大信号稳定的充分条件,可用来估计系统的大信号稳定区域。
根据上文中提供的系统参数,可以算出|Tv/(1+Ti+Tv)|=1.08,|Ti/(1+Ti+Tv)|=2.16,结合式(15)可以画出Boost变换器的充分稳定区域如图6所示,图中阴影部分表示状态变量能达到稳定状态时所能允许的最大扰动范围。另外,可以推测,不同的环路增益会得到不同的稳定区域。
将环路增益作为变量,根据图6结果可计算出不同环路增益下的稳定区域面积S为

图6 闭环控制Boost变换器的预测稳定区域Fig.6 Predicted stability region for the closed-loop controlled Boost converter

由式(16)可进一步得到如下关系

根据式(17),环路增益的取值对面积S和扩展面积S′的影响均为正定单调,因此可用扩展面积S′近似分析电压环和电流环增益分别对实际稳定区域S的影响。图7即为扩展稳定区域面积S′与环路增益的关系。

图7 稳定区域与环路增益的关系Fig.7 Relationship between the stability region and the loop gains
可以看出,在电流环增益(电压环增益)较小的位置,随着电压环增益(电流环增益)的增加,稳定区域也随之扩大;而在电流环增益与电压环增益所占比例相当时(图中中间区域),稳定区域最小,稳定性也最差。因此,在小信号设计的基础之上,可借助此方法估计控制器的大信号稳定区域,以修正控制器参数对系统进行稳定性再设计,而不需要改变控制器结构。
5 实验验证
为了验证前述分析的有效性,根据设计参数搭建了 Boost变换器实验样机,其中主电路参数取值与上文表中所列参数一致,控制电路参数也与第 3节中仿真取值基本一致。图8为Boost变换器在额定条件下的稳态实验波形,其中 vGS为开关驱动脉冲,开关频率为 110 kHz,vg与 vO分别为输入电压与输出电压,iL为电感电流,其额定值为4.5A。

图8 Boost电路的稳态波形Fig.8 Steady state waveforms for the Boost converter
根据第4节中稳定区域估计结果,选取图6中稳定区域内、外两点Poutr与Pinr作为测试点对Boost变换器进行了动态电路实验,其中 Pinr点处状态变量即电容电压与电感电流的取值为(20V,6.8A),而Poutr点处状态变量的取值为(20V,7.8A)。图9a即为Boost变换器在20V输出时,电感电流从额定值4.5~6.8A(点Pinr处的电感电流值)脉冲切换下的时域动态响应波形,图9b则为图9a中虚线框内波形的局部放大效果。从图中可以看出,在此种情况下,Boost变换器能始终通过过渡过程达到期望的单周期稳定状态。


图9 电感电流从额定值至Pinr处的电流切换下的动态波形Fig.9 Dynamic waveforms for the inductive current step from the nominal value to that of Pinr
图10a为Boost变换器在20V输出时,电感电流从额定值 4.5~7.8A(点 Poutr处的电感电流值)脉冲切换下的时域动态响应波形,图10b同样为图10a中虚线框内波形的局部放大效果。可以看出,此种状态下,Boost变换器从额定电感电流至 Poutr处电感电流跳变后无法达到单周期稳态,开关驱动脉冲呈现多开关周期状态,此时的电感电流出现较大幅度振荡,电流纹波值为稳定状态时的4倍左右,同样也导致输出电压纹波量的增加。电路实验结果与前述理论分析基本一致,较好地验证了稳定区域估计的有效性。


图10 从电感电流额定值至Poutr处的电流切换下的动态波形Fig.10 Dynamic waveforms for the inductive current step from the nominal value to that of Poutr
6 结论
本文以平均电流控制 Boost变换器为研究对象,提出一种估计闭环控制系统的大信号稳定区域的解析方法。通过推导占空比的表达式,借助范数三角不等式,可得出闭环控制 Boost变换器在大信号扰动下的充分稳定条件。电路实验结果验证了该方法的有效性。
考虑到开关功率变换器的主流分析方法与设计仍然是基于系统静态工作点上取小信号模型的思路,本文中得到的结果可用于开关功率变换器的稳定性再设计。通过解析分析小信号环路对大信号稳定性的影响,以期达到小信号与大信号的综合设计。后续研究工作将细化控制器各参数对稳定区域的影响,并以动态性能与稳定性的最佳折中为设计导向,对所提方法进行优化。
[1] 王刚,马伟明,付立军,等.周期分段线性系统稳定性理论[J].电工技术学报,2010,25(12): 84-91.Wang Gang,Ma Weiming,Fu Lijun,et al.Stability theory of periodic piecewise linear system[J].Transactions of China Electrotechnical Society,2010,25(12): 84-91.
[2] Middlebrook R D,Cuk S.A general unified approach to modeling switching-converter power stages[J].International Journal of Electronics,1977,42(6):521-550.
[3] Erickson R W,Cuk S,Middlebrook R D.Large-signal modelling and analysis of switching regulators[C].Proc.Annual Power Electronics Specialists Conference,1982.
[4] 张波.电力电子变换器非线性混沌现象及其应用研究[J].电工技术学报,2005,20(12): 1-12.Zhang Bo.Study of nonlinear chaotic phenomena of power converters and their applications[J].Transactions of China Electrotechnical Society,2005,20(12): 1-12.
[5] Guinjoan F,Calvente J,Poveda A,et al.Large-signal modeling and simulation of switching DC-DC converters[J].IEEE Transactions on Power Electronics,1997,12(3): 485-494.
[6] Sun J,Grotstollen H.Symbolic analysis methods for averaged modeling of switching power converters[J].IEEE Transactions on Power Electronics,1997,12(3):537-546.
[7] Lineykin S,Ben-Yaakov S.Unified SPICE compatible model for large and small-signal envelope simulation of linear circuits excited by modulated signals[J].IEEE Transactions on Industrial Electronics,2006,53(3): 745-751.
[8] Tan F D,Ramshaw R S.Instabilities of a boost converter system under large parameter variations[J].IEEE Transactions on Power Electronics,1989,4(4):442-449.
[9] Olalla C,Queinnec I,Leyva R,et al.Optimal statefeedback control of bilinear DC-DC converters with guaranteed regions of stability[J].IEEE Transactions on Industrial Electronics,2011,59(10): 3868-3880.
[10] Chung H,Ioinovici A.Design of feedback gain vector of two-state basic PWM multifeedback regulators for large-signal stability[J].IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications,1997,44(8): 676-683.
[11] Sanders S R,Verghese G C.Lyapunov-based control for switched power converters[J].IEEE Transactions on Power Electronics,1992,7(1): 17-24.
[12] Chen F,Cai X S.Design of feedback control laws for switching regulators based on the bilinear large signal model[J].IEEE Transactions on Power Electronics,1990,5(2): 236-240.
[13] 张涌萍,张波,陈斌,等.基于双线性系统理论的Boost DC-DC变换器新型控制策略[J].电工技术学报,2006,21(7): 109-114.Zhang Yongping,Zhang Bo,Chen Bin,et al.A novel control law of boost DC-DC converter based on bilinear theory[J].Transactions of China Electrotechnical Society,2006,21(7): 109-114.
[14] Komurcugil H,Kukrer O.Lyapunov-based control strategy for power-factor preregulators[J].IEEE Transactions on Circuits and Systems I-Fundamental Theory and Applications,2003,50(9): 1226-1229.
[15] Mazumder S K,Acharya K.Multiple Lyapunov function based reaching condition analyses of switching power converters[C].2006 IEEE Power Electronics Specialists Conference,2006: 1160-1167.
[16] Hu T S.A nonlinear-system approach to analysis and design of power-electronic converters with saturation and bilinear terms[J].IEEE Transactions on Power Electronics,2011,26(2): 399-410.
[17] Sullivan C J,Sudhoff S D,Zivi E L,et al.Methods of optimal Lyapunov function generation with application to power electronic converters and systems[C].IEEE Electric Ship Technologies Symposium,2007: 267-274.