双通道两视干涉相位差解径向速度模糊方法
2014-06-09张学攀廖桂生朱圣棋高永婵
张学攀,廖桂生,朱圣棋,杨 东,高永婵
(西安电子科技大学 雷 达信号处理国家重点实验室,陕西 西 安 710071)
合成孔径雷达成像和地面动目标显示(SAR-GMTI)技术,将运动目标定位于SAR场景中,可以广泛应用于军事侦查等领域[1-4].运动目标定位需要估计其径向速度.当径向速度超过最大不模糊速度时,径向速度估计出现模糊.所以在SAR-GMTI系统中,无模糊估计径向速度是运动目标精确定位的必要前提[5-7].
沿航迹干涉(ATI)是估计运动目标径向速度的典型方法,它通过双通道的干涉处理,得到径向速度与干涉相位的关系,进而估计运动目标的径向速度.但由于干涉相位关于2π缠绕,所以径向速度解模糊转化为对干涉相位解缠绕.通过无缠绕的干涉相位可以无模糊地估计出径向速度.早期的研究工作主要集中在通过增加系统硬件设备实现干涉相位解缠绕,如增加脉冲重复频率(PRF)、多PRF、多载频或多基线等方法[8-10].这些方法在一定程度上提高了系统的最大不模糊速度,但增加了系统实现的硬件成本.文献[11]利用沿航迹干涉SAR(AT-InSAR)多通道解径向速度模糊,并给出了干涉相位的概率分布函数,分析了AT-InSAR估计径向速度的最大似然估计精度;但该方法随着径向速度趋于最大不模糊速度,其估计性能会明显下降.将压缩感知方法应用于径向速度解模糊[12],通过增大多普勒谱或利用多重PRF方式可以高精度估计无模糊径向速度,但因高运算复杂度而付出了较高的时间成本代价.
在不改变系统硬件设备(如通道、载频等)的情况下,多视处理具有灵活且高效的应用.多视处理不但可以构造不同方位时间或距离频率[13]的数据,而且可以有效地抑制噪声,具有广泛的应用空间.通过在距离维构造两视数据,利用双通道基带多普勒中心频率之差与绝对多普勒中心频率之差相等的思想[13],实现无模糊估计径向速度.将数据转换到方位时间距离频率域,利用距离维两视聚焦后运动目标的位置差估计模糊数[14].文献[15]通过对两通道数据做多视交叉相关处理(MLCC)估计场景多普勒中心.笔者在此基础上,提出了基于双通道两视干涉相位差实现无模糊估计运动目标径向速度的方法.该方法将不同通道接收数据转换到距离频率域,并构造两视数据,通过两视交叉相关处理,得到径向速度与干涉相位差的关系.干涉相位差无缠绕问题,所以可以无模糊估计运动目标的径向速度.
1 算法模型
1.1 回波信号模型
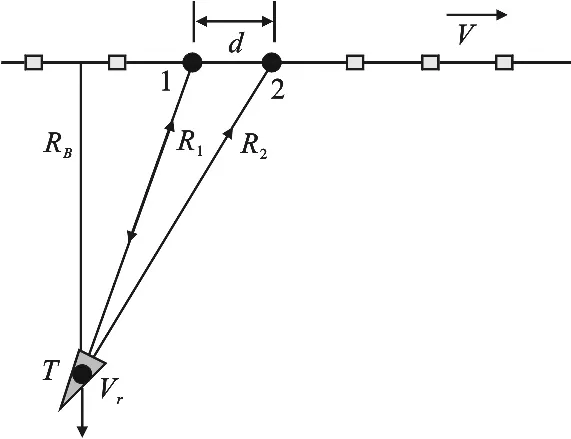
图1 系统参数及工作方式示意图
以无模糊估计径向速度为目的,设运动目标仅包含均匀的径向速度Vr,其他运动参数暂不考虑.系统采用沿航迹双通道单发双收模式,工作方式如图1所示.通道间距为d,场景中运动目标T到航线的最近距离为RB.
由图1的几何关系得到运动目标到通道1和通道2的瞬时斜距R1(tm)、R2(tm)分别为

式(1)和式(2)中的近似关系是对瞬时斜距在慢时间tm=0处做泰勒展开及Vr≪V得到的.
杂波背景下,由于干涉相位敏感于杂波,需要首先进行杂波抑制.通过增加一个通道,对接收数据做偏置相位中心天线(DPCA)技术处理抑制杂波[7].杂波抑制后双通道的信号为

1.2 构造距离频率两视数据
在距离脉压域选取运动目标对应的数据,转换到距离频率域,并忽略幅度项,有

在距离频率域构造两视数据,设两视数据的距离频谱间隔为Δf,

其中,N为两视数据之间的距离频率单元间隔,MF为离散傅里叶变换点数,fs为距离维采样频率.以正频率点数据(中心频率为fc+Δf 2)作为视数1,以负频率点数据(中心频率为fc-Δf 2)作为视数2,如图2所示.
经过距离向逆傅里叶变换,通道1和通道2的视数1信号分别为(忽略幅度项)


图2 通道1两视数据
其中,c为光速,fc为载波中心频率.时间延迟Δt满足以下关系:

1.3 无模糊估计径向速度
对通道2视数1数据作Δt 2时间延迟,并补偿与径向速度无关的时间延迟项,得到

将延迟后的通道2视数1数据与通道1视数1做干涉处理,干涉结果为

得到干涉相位φ1为

式(13)得到了径向速度与干涉相位的关系.但是由于载波中心频率fc较大,当径向速度较大时干涉相位出现缠绕问题,所以还需要以下处理消去干涉相位中的fc项.
类似地,将两个通道视数2数据做干涉处理,得到

干涉相位φ2为

根据式(7)、式(10)、式(13)和式(15)可以得到视数1和视数2的干涉相位差为

由式(16)可见,干涉相位差中不存在fc项.一般地,NfsΔtVr≪cMF,所以干涉相位差Δφ小于π,不存在相位缠绕问题,径向速度无模糊估计为

由式(12)~(16)不难发现,干涉相位差可以认为将式(12)和式(14)做干涉处理后的干涉相位,即笔者所提方法也可以认为经过两次干涉处理得到径向速度无模糊估计.通过两次干涉处理可以有效提高信噪比,减小噪声对干涉相位的影响,从而保证径向速度的估计精度.至此,从理论上推导了利用双通道两视干涉相位差实现无模糊估计径向速度的方法.注意,笔者所提方法通过三通道对消实现杂波抑制,得到双通道的运动目标信号,再通过两视干涉处理无模糊估计径向速度.干涉相位差是由杂波对消后的双通道数据得到的.笔者认为三通道杂波抑制与双通道干涉相位差并不矛盾.
2 性能分析
本节主要分析该方法的性能,包括最大不模糊速度和两视距离频率单元间隔对估计性能的影响.
2.1 最大不模糊速度
根据干涉相位差Δφ以2π为周期缠绕,得出笔者所提方法最大不模糊速度为

由式(18)可知,该方法的最大不模糊径向速度Vr,max与雷达平台运动速度V和离散傅里叶变换点数MF成正比,与通道间距d、距离维采样频率fs和两视距离频率单元间隔N成反比.其中,两视距离频率单元间隔N和离散傅里叶变换点数MF与系统硬件设备无关,即可以通过数字处理方法灵活地调节系统最大不模糊速度.一般地,雷达平台运动速度V在102量级,通道间距d为100量级,两视距离频谱间距Δf为107量级,通过式(18)可以估算出笔者所提方法的最大不模糊径向速度为103量级.传统ATI方法的最大不模糊速度=λV (2d)=cV (2dfc),由于受载频fc影响,一般较小;而笔者所提方法避免了fc的影响,而
是利用了采样频率fs,极大地提高了系统的最大不模糊速度.
2.2 两视距离频率单元间隔的影响
由式(18)可见,系统最大不模糊速度与两视距离频率单元间隔N成反比,即在理想情况下,两视距离频率单元间隔越小,系统最大不模糊速度越大.但是是否距离频率单元间隔越小越好呢?首先,给出距离频率单元间隔N较小和较大情况,如图3所示.

图3 两视距离频率单元间隔构造方式
实际测量的干涉相位差Δφ′存在一定的偏差,即

其中,φn为相位误差,由噪声或剩余杂波等非理想因素引起.假设φn服从高斯分布,一般认为相位误差φn较小.当干涉图像的信噪比(SNR)较大或Δφ较大时,可以忽略.由式(16)可知,当两视距离频率单元间隔N较小时(如图3(a)所示),Δφ较小,Δφ′受φn影响较大;而当两视距离频率单元间隔N较大时(如图3(b)所示),两视数据量较小,则SNR较小,从而Δφ′受φn影响较大.所以,两视距离频率单元间隔太大或太小都不利于精确估计径向速度.
3 仿真分析
本节通过仿真,分析所提方法的无模糊估计性能.系统仿真参数如表1所示.

表1 系统仿真参数
3.1 理想情况
理想情况下,以通道1为例,将包含运动目标信息的接收数据转换到方位时间距离频率域,构造两视数据.将不同通道相同视数数据做干涉处理,计算得到两视数据的干涉相位差如图4所示.
由图4可见,不同距离频率单元的干涉相位差基本相同,得到干涉相位差均值Δφ=0.016 7rad,利用式(17)估计运动目标的径向速度Vr=9.995 1m/s,估计的相对误差仅为0.049%,具有很高的估计精度.为验证所提算法的普适性,分别仿真径向速度理论值为5~9m/s时的估计值,仿真数值结果如表2所示.

表2 不同径向速度的估计性能分析
由表2可见,针对不同的径向速度,笔者所提方法估计相对误差仅为0.04%左右,具有很高的估计精度,可以满足地面运动目标参数估计和定位的需要.
3.2 两视距离频率单元间隔的影响
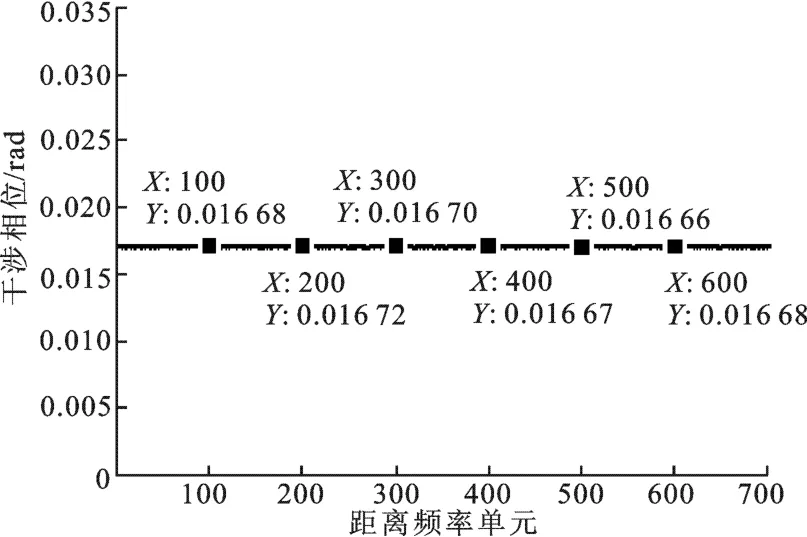
图4 两视数据干涉相位差
仿真分析两视距离频率单元间隔N对径向速度估计性能的影响.仿真参数:设SNR为20dB,N的范围为50~1 400,等间隔(设为50)排布,经100次蒙特卡洛实验,仿真结果如图5所示.
由图5仿真结果可见,当距离频率单元间隔较大(以图5中N1=50为例)或较小(以图5中N4=1 400为例)时,100次蒙特卡洛实验中25%~75%次统计意义下的径向速度估计范围分别为(9.68~10.14)m/s和(9.69~10.19)m/s,径向速度估计均值分别为9.949m/s和9.8901m/s;对于距离频率单元间隔适中(以图5中N2=700和N3=750为例)的情况,25%~75%统计意义下径向速度估计范围分别为 (9.89~10.09)m/s和 (9.89~10.11)m/s,径向速度估计均值分别为10.013 2m/s和10.008 1m/s.可见,当距离频率单元间隔适中时,径向速度的估计性能好于间隔较大或较小的情况.为了更加直观地说明不同距离频率单元间隔对径向速度估计性能的影响,给出不同距离频率单元间隔对应的估计误差和估计标准差,如图6所示.由仿真结果可见,距离频率单元间隔适中时的估计性能明显优于间隔较大或较小时的性能.从而验证了性能分析中距离频率单元间隔对径向速度估计影响的结论.

图5 两视距离频率单元间隔对径向速度估计的影响

图6 两视数据频率单元间隔的影响
3.3 实测数据
采用三通道实测数据对所提方法验证,实测系统参数如表1所示.对实测数据做SAR成像,成像结果如图10所示.图10中运动目标由于具有较大径向速度,偏离于SAR图像中的公路.将实测数据经过杂波抑制后转换到距离时间方位多普勒域,如图7所示,可以明显观测到运动目标.
以图7中运动目标为例验证所提方法的有效性.经过所提方法一系列处理,运动目标的两视干涉图像如图8所示.并得到干涉相位差,如图9所示.由图9所示,干涉相位差仍呈现出较小波动,这主要是由于存在通道不一致、噪声和剩余杂波等非理想因素导致的随机相位误差引起的.为减小随机相位误差的影响,对不同距离频率单元的干涉相位差取平均,得到干涉相位差均值Δφ=-0.020 8rad,进而估计出动目标径向速度=-6.610 5m/s,则由径向速度导致的定位偏移ΔX=RBVr(Vρa)=-206.577 3m,其中,ρa为SAR成像的方位分辨率.重新对地面运动目标定位,定位结果如图10所示,运动目标被定位在场景中公路附近.由定位结果可见,径向速度估计仍然存在一定的误差,这主要是由于存在通道不一致、噪声和剩余杂波等非理想因素引起的.在定位精度要求不高的情况下,笔者所提算法基本能够满足地面运动目标检测、参数估计和定位的需要.但对于要求高精度目标定位的情况,仍需要继续研究改进的算法,从而减小非理想因素的影响,提高动目标参数估计和定位精度.

图7 实测数据杂波抑制后的结果
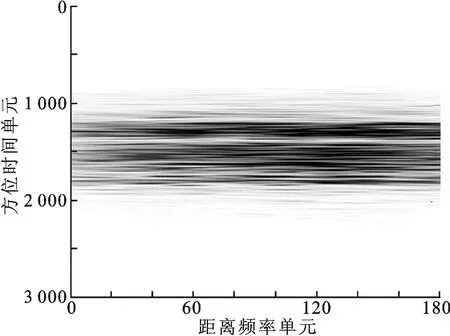
图8 实测数据两视干涉图像

图9 干涉相位差

图10 运动目标定位结果
4 结束语
笔者提出一种根据双通道两视干涉相位差估计无模糊径向速度的方法.该方法将不同通道距离脉压后的数据转换到距离频率域,构造两视数据.将不同通道相同视数的数据做干涉处理,得到两视的干涉相位,再根据两视干涉相位差无模糊地估计径向速度.通过以上处理得到的干涉相位差不存在2π缠绕问题,其实质是通过处理减小了相位,使得所提算法具有较大的最大不模糊速度.在杂波背景下推导了所提方法,并主要从最大不模糊速度和非理想情况对所提方法的影响做了性能分析.最后,通过仿真和实测数据处理验证了所提方法的有效性.对于如何更加有效地降低非理想因素(通道不一致、噪声和剩余杂波等)对相位的影响,仍然是影响估计精度的主要问题,笔者将在后续研究中继续探索.
[1] Sun G,Xing M,Xia X G,et al.Robust Ground Moving-Target Imaging Using Deramp-Keystone Processing[J].IEEE Transactions on Geoscience and Remote Sensing,2013,51(2):966-982.
[2] Xu Ruiping,Zhang Dandan,Hu Donghui,et al.A Novel Motion Parameter Estimation Algorithm of Fast Moving Targets via Single-Antenna Airborne SAR System[J].IEEE Geoscience and Remote Sensing Letters,2012,9(5):920-924.
[3] Dragoševic M V,Burwash W,Chiu S.Detection and Estimation with RADARSAT-2Moving-Object Detection Experiment Modes[J].IEEE Transactions on Geoscience and Remote Sensing,2012,50(9):3527-3543.
[4] Budillon A,Evangelista A,Schirinzi G.GLRT Detection of Moving Targets via Multibaseline Along-Track Interferometric SAR Systems[J].IEEE Geoscience and Remote Sensing Letters,2012,9(3):348-352.
[5] Schiavulli D,Sorrentino A,Migliaccio M.An Innovative Technique for Postprocessing Descalloping[J].IEEE Geoscience and Remote Sensing Letters,2012,10(3):424-427.
[6] Samczynski P.Superconvergent Velocity Estimator for an Autofocus Coherent MapDrift Technique[J].IEEE Geoscience and Remote Sensing Letters,2012,9(2):204-208.
[7] Cerutti-Maori D,Sikaneta I.A Generalization of DPCA Processing for Multichannel SAR GMTI Radars[J].IEEE Transactions on Geoscience and Remote Sensing,2012,51(1):560-572.
[8] Liu Y,Meng H,Li G,et al.Range-velocity Estimation of Multiple Targets in Randomised Stepped-frequency Radar[J].Electronics Letters,2008,44(17):1032-1034.
[9] 贺顺,杨志伟,徐青,等.分布式卫星SAR面目标径向速度估计方法[J].西安电子科技大学学报,2011,38(4):129-132.
He Shun,Yang Zhiwei,Xu Qing,et al.Radial Velocity Estimation for the Extended Moving Target with Distributed Space-borne SAR[J].Journal of Xidian University,2011,38(4):129-132.
[10] 杨垒,王彤,保铮.解运动目标径向速度模糊的一种新方法[J].西安电子科技大学学报,2009,36(2):189-192.Yang Lei,Wang Tong,Bao Zheng.New Method for Solving the Ambiguity of the Radial Velocity of a Moving Target[J].Journal of Xidian University,2009,36(2):189-192.
[11] Budillon A,Pascazio V,Schirinzi G.Estimation of Radial Velocity of Moving Targets by Along-Track Interferometric SAR Systems[J].IEEE Geoscience and Remote Sensing Letters,2008,5(3):349-353.
[12] Quan Y H,Zhang L,Xing M D,et al.Velocity Ambiguity Resolving for Moving Target Indication by Compressed Sensing[J].Electronics Letters,2011,47(22):1249-1251.
[13] Xu R,Zhang D,Huang L,et al.Unambiguous Parameter Estimation of Radial Velocity Approach for Airborne SAR GMTI[C]//3rd International Asia-Pacific Conference on Synthetic Aperture Radar.Piscataway:IEEE,2011:426-429.
[14] Zhu Shengqi,Liao Guisheng.Estimating Ambiguity Number of Radial Velocity for Ground Moving Targets from a Single SAR Sensor[C]//30th URSI General Assembly and Scientific Symposium.Piscataway:IEEE,2011:1-4(6050827).
[15] Wong F,Cumming I G.A combined SAR Doppler Centroid Estimation Scheme Based Upon Signal Phase[J].IEEE Transactions on Geoscience and Remote Sensing,1996,34(3):696-707.
