基于PLC的模糊PID控制在烟叶复烤系统中的应用
2014-06-05朱煜钰王增胜
朱煜钰,王增胜
·计算机及网络技术应用·
基于PLC的模糊PID控制在烟叶复烤系统中的应用
朱煜钰,王增胜
(黄河科技学院 机械系,郑州 450063)
烟叶复烤过程具有时滞、不确定、非线性等特性,利用常规的比例-积分-微分控制已不能满足烟叶复烤过程的各项性能指标,采用模糊PID控制可以改善系统的性能,改进可编程控制器的PID模块功能,实现PID参数的在线调整。文中探讨了基于PLC的模糊PID控制的实现过程,利用模糊控制的模糊推理,提出一种基于PLC的模糊PID控制的解决方案。
烟叶复烤;可编程控制器;模糊PID;应用
可编程控制器(programmable logical controller,PLC)是在传统继电器控制和计算机控制基础上,针对工业应用发展起来的一种控制技术,其功能模块丰富,可与工业现场输入、输出信号直接连接,具有可靠性高、使用方便、易于实现机电一体化等优点。因此,被广泛应用于机电、化工等多种工业环境[1]。
随着人工智能技术的发展,将模糊控制、神经网络控制、遗传算法等人工智能技术与常规比例-积分-微分(proportion integration differentiation,PID)技术相结合[2],可构成模糊PID、神经网络PID、专家PID和基于遗传算法的PID等,这些先进的PID控制不依赖对象的数学模型,鲁棒性好。神经网络PID控制器可通过训练神经网络的权值间接地在线调整PID参数,但其结构复杂,收敛速度慢;专家PID控制器通过专家系统在线调整PID控制器的参数,但需要足够的先验知识,设计过程复杂;基于遗传算法的PID控制器利用遗传算法获得最佳PID参数,但存在响应速度慢、早熟、易陷入局部极小等问题;模糊PID控制器便于利用人们的经验知识,通过模糊规则推理实现PID参数的在线调整,具有很强的自适应性。根据各种PID控制器的特点,本文选用模糊PID控制器[3]。
烟叶复烤是对初烤烟叶进行再加工的过程,是保证烟叶质量的关键环节。烟叶复烤的主要目的是使叶片的水分、温度达到规定的工艺技术指标。在烟叶复烤过程中,烟叶与具有一定温度、湿度、压力、流速的热传介质在相对运动过程中发生热交换,从而导致烟叶的干燥、冷却回潮等不同过程,并且任一区段的温度、压力变化都会影响到其后各区段参数变化。常规PID有较强的鲁棒性,结构简单,参数物理意义明确,工程上易于实现等优点,被广泛应用于工业过程中,但是PID参数一旦确定,不能随着控制对象的变化而变化;模糊PID在运行过程中,通过不断检测偏差e和偏差变化率ec,在线调整PID的参数,以满足不同的要求[4],其控制器可采用单片机、微型机、专用机、PLC等。由于PLC的优良性能,本文采用基于PLC的模糊PID对烟叶复烤过程进行控制,该控制方法具有良好的动、静态性能。实验表明,该控制方法是切实可行的[5]。
1 模糊PID的原理
模糊PID的基本结构如图1所示[6]。模糊控制器的输入为偏差e和偏差变化率ec,模糊控制器的输出为PID的三参数:比例参数kp,积分参数ki和微分参数kd,实现在线自整定PID参数。其实现过程是:先找出PID三参数与偏差e和偏差变化率ec之间的模糊关系,在运行过程中通过不断的检测偏差e和偏差变化率ec,再根据模糊控制程式来对kp,ki,kd进行在线调整,以满足在不同偏差e和偏差变化率ec时对控制器参数的不同要求,使烟叶复烤过程达到期望要求。

图1 模糊PID基本结构框图
常规PID控制器控制算法为:

式中:e(t)为系统偏差;kp为比例系数;积分系数ki=kp/Ti;微分系数kd=kpTd。
PID离散算法为:

式中:e(k)为第k次采样后得到的偏差;kp,ki和kd分别为比例、积分、微分系数;u(k)为输出控制量。模糊PID控制的关键在于参数是可调的。
2 模糊PID参数的调整
模糊PID参数调整的目的是实现PID参数的在线调整,该方法不需要知道系统的精确模型,充分利用了人的经验知识,具有一定的抗干扰性,应用简单。该方法的实现是根据模糊推理的算法流程,计算输入信号到输出信号的解集。其算法主要有三个要点:(1)模糊化。将输入测量值变换成相应的论域,将输入数据转换成合适的语言值,如{NB,NM,NS,ZO,PS,PM,PB},其中NB表示负大,NM表示负中,NS表示负小,ZO表示零,PS表示正大,PM表示正中,PB表示正大,可以去掉中间项PM和NM简化为五个等级{NB,NS,ZO,PS,PB}。减少等级后模糊规则减少,控制分辨率也降低;反之,增加等级,控制分辨率提高,但规则数增加,采用多少个等级的语言变量根据系统的需要确定。(2)模糊推理。即建立规则库进行模糊推理。(3)解模糊。将基础变量论域上的模糊量变换成基础变量域上的确定值。结合模糊PID算法的特点,如何计算模糊PID的参数,并将计算结果直接用于PLC将通过以下四个环节进行分析[7]。
2.1 定义输入、输出模糊集和论域
模糊控制器的输入量为偏差e和偏差的变化率ec,模糊控制器的输出量为kp,ki,kd,模糊控制器的输入、输出的语言变量,本文选取五个等级的语言值,即NB、NS、ZO、PS、PB。
2.2 定义输入、输出隶属函数及模糊输出量
确定模糊变量的隶属函数,即确定模糊变量和相应论域中元素的隶属度关系。依靠经验选择三角形隶属函数,输入变量隶属度函数如图2所示,输出变量隶属度函数如图3所示。

图2 e和ec的隶属度函数

图3 kp、ki和kd的隶属度函数
为了使模糊变量标准化,对论域进行归一化处理,将论域归一化为[0,1]。
2.3 建立模糊规则表
在模糊控制中,模糊规则的制定是控制领域长期研究的难点内容。通过不断调整参数使系统的输出特性达到最佳是制定模糊控制规则表的算法思想。表1、表2、表3分别为根据推理算法的结构模式得出的输入e、ec和输出kp、ki、kd的模糊规则表[8]。

表1 kp控制规则表
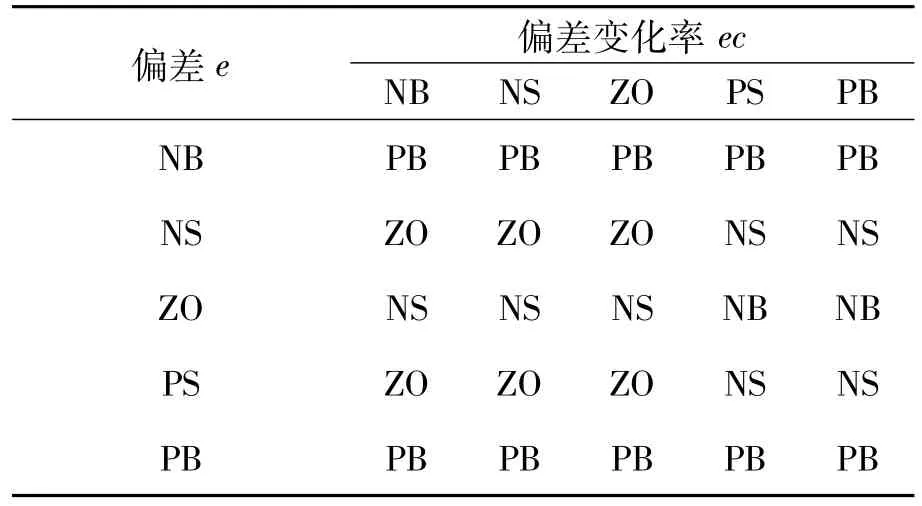
表2 ki控制规则表

表3 kd控制规则表
2.4 计算输出量
通过模糊推理可得到输出量的隶属度,还需进行解模糊以输出精确量,目前,常采用的方法有最大隶属度法和重心法。由文献[4-6]可知,最大隶属度法的特点在于设计简单,这里采用最大隶属度法进行解模糊。
利用最大隶属度法求输出量时,隶属度最大的元素就是输出量的精确值,当最大隶属度对应多个输出值时,应对这些输出值进行平均化处理,得到最终值。并将该值作为PID控制器的参数,实现对被控对象的控制。
3 模糊PID在PLC中的实现
本文选择西门子PLC224XP作为控制器,利用测温模块和模糊PID完成烟叶复烤过程,图4为在PLC中实现模糊PID的设计流程图。
3.1 PLC中的PID算法

式中:MPn、MIn、MDn是第n个采样时刻的比例项、积分项和微分项;MX是前面所有积分项之和;kp、Ti、Td是比例系数、积分时间常数、微分时间常数;Ts为采样周期;SPn、PVn为第n个采样时刻的给定值、过程变量值[9]。
需注意,PLC的PID模块要求提供的参数是kp(k)、Ti(k)、Td(k),要将ki(k)和kd(k)变换成Ti(k)、Td(k),变换关系为:

根据模糊控制器的输出,由上述关系式可以求出积分时间常数和微分时间常数[10]。

图4 模糊PID在PLC中实现的程序流程图
3.2 PLC程序


4 结束语
目前,常规PID在PLC中的应用非常广泛,但是常规PID的参数整定很困难,当控制对象发生变化时,常规PID的控制效果欠佳,而模糊PID具有较强的学习能力和适应能力。将模糊PID控制技术应用到PLC具有重要的应用意义。
[1]廖常初.S7-200PLC编程及应用[M].北京:机械工业出版社,2008.
[2]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2004.
[3]李士勇.模糊控制·神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1996.
[4]DU Zhenbin,QU Zifang.Improved adaptive fuzzy control for MIMO nonlinear time-delay systems[J].J.Control Theory.Appl.,2011,9(2):278-282.
[5]蒋纯谷.模糊PID在PLC中的应用方法研究[J].机械制造与自动化,2001(3):179-181.
[6]RONG Huigui,ZHENG Hui,LI Zhengqing.Tuning of fuzzy PID controller for Smith predictor[J].J.Cent.South Univ.Technol.,2010(17):566-571.
[7]冯冬青,谢宋和.模糊智能控制[M].北京:化学工业出版社,1998.
[8]李东辉.FUZZY控制规则自调整和FUZZY控制系统寻优及其仿真研究[J].模糊数学,1986(3):53-61.
[9]陆静逸,杨风,郭名君,等.基于PLC的模糊变频无极调速系统[J].电子测试,2012(2):50-54.
[10]谢维.PLC的PID自整定技术研究与实现[J].计算机测量与控制,2009,17(8):1544-1547.
Application of PLC Based Fuzzy PID Control in Tobacco-redrying System
ZHU Yuyu,WANG Zengsheng
(Department of Mechanics,Huanghe Science and Technology College,Zhengzhou 450063,China)
The process of tobacco-redrying has the characteristics of lagging,uncertainty and being nonlinear,so it is unable to satisfy every performance target by using the traditional Proportion Integration Differentiation(PID)controllingmethod.The fuzzy PID control can improve the performance of the system and the function of PLCPIDmodule,this paper discusses the PLC based fuzzy PID control realization process.We put forward a solution for PLC based fuzzy PID control using fuzzy control fuzzy reasoning ability.
tobacco-redrying;programmable logical controller;fuzzy PID;application
TP29
A
10.3969/j.issn.1672-4550.2014.05.016
2013-07-17;修改日期:2013-11-14
郑州市工业机器人视觉及其控制重点实验室资助项目。
朱煜钰(1982—),女,硕士,讲师,研究方向:控制理论、机器人技术。
