搅拌箱液位检测与自动控制
2014-06-05袁昌博
袁昌博
(新疆众和股份有限公司 乌鲁木齐 830013)
搅拌箱液位检测与自动控制
袁昌博
(新疆众和股份有限公司 乌鲁木齐 830013)
加强对生产成本的节约是提升企业竞争力的途径之一,近年来,企业对生产成本控制的要求也在不断提高,随着科技的不断进步,很多设备都已经实现全自动化控制,将生产过程中的信号检测、反馈控制交给设备自动完成,节约大量的劳动成本,提高生产企业运行效率。本文立足企业实际生产情况,利用相关技术弥补设备控制缺陷,寻找解决生产物资浪费的方法,提高设备自动化水平和生产过程可控性。
液位检测 PLC 超声波传感器
1 前言
板式过滤机搅拌箱是保证铝卷生产过程中的重要设备,在设备的原设计中,轧制油的添加是完全通过手动方式进行的,所以在日常操作过程中,会经常发生由于人员操作失误引起的轧制油溢出箱体事故,不但污染油体,还造成产品质量影响和成本增加。因此对于搅拌箱实现液位检测和控制是非常重要的。
2 搅拌箱控制系统的基本工作原理
2.1 搅拌箱检测装置的工作原理和基本构成
该检测装置采用超声波传感器对搅拌箱内部液位变化进行无接触测量,该传感器可以广泛用于各种工业环境内,利用超声波的反射特性可以精确测量距离。
超声波传感器检测的优点在于可以忍受特别恶劣的工作环境和稳定的信号反馈,该装置的检测对象包括固体、液体和小颗粒物质,其工作原理是利用固定反射装置将超生波束发射到被测物体上,在感应范围内,超生波束接触到被测物体表面后会产生反射波束,并由接收器感应,通过回波时间来计算出传感器与被测物体之间的距离。
超声波的声锥存在±5°的发散角,该发散角决定了声锥的空间大小,那么根据以上特性,如果存在一个离传感器距离S处的物体,那么声锥的直径D可以由以下公式计算出来:

公式中的S可以被看成被测物体的摆放范围,当然应该注意被测物体的反射面要与传感器的反射面保持水平,否则会导致声波反射偏离,那么传感器的输出信号就会存在误差或者没有信号。
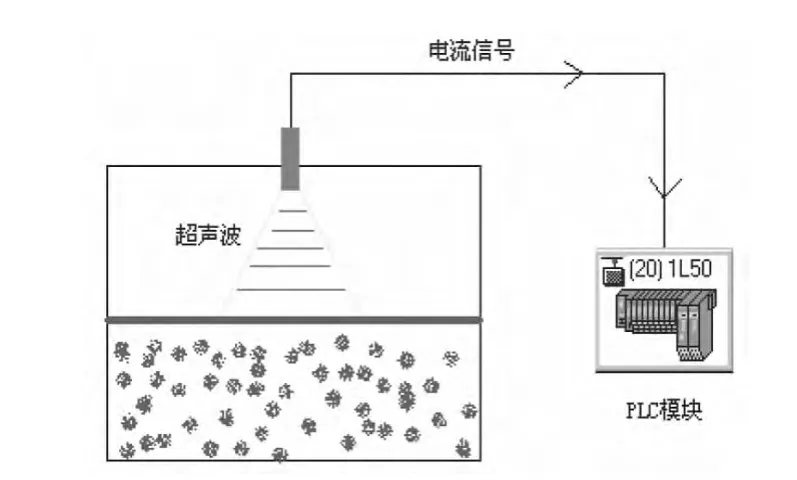
图1 检测装置基本组成
如图1所示,该检测装置基本组成主要由超声波传感器和屏蔽电缆组成,超声波传感器会将反射信号转换成与距离成正比的模拟量电流输出信号4~20mA,然后电流信号通过屏蔽电缆传输到PLC的模拟量输入模块中。
2.2 PLC输入设备的选型及接口设置
考虑到输入信号为模拟量电流信号,此设计中采用的模拟量输入模块型号为6ES7134-4GB11-0ABO,将超声波传感器BN、BK、BU端分别与PLC的L、输入、M端连接,见图2。
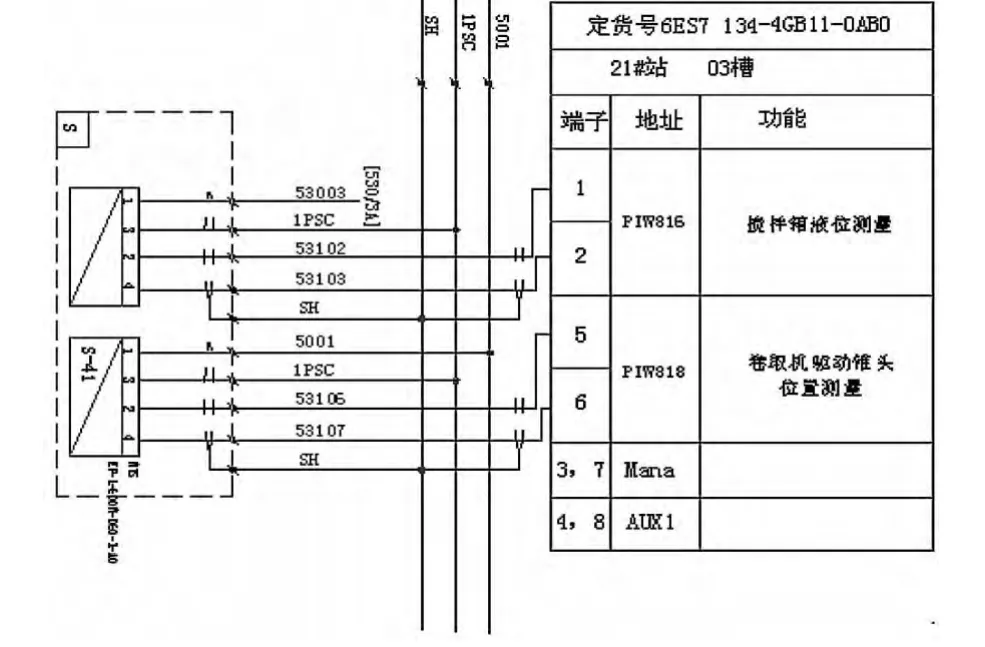
图2 接线原理图
2.3 搅拌箱程序编辑的逻辑原理
PLC输入的数据类型为整数,因为用浮点数进行数据处理,所以要把整数转换为浮点数,然后再根据输入数据的线性特点,将浮点数乘以一个特定的系数,即计算出传感器与液面的实际测量距离,见图3。
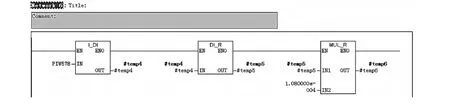
图3 计算程序段
要得出搅拌箱的液位实际高度,就要把搅拌箱的箱体高度测量出来,用箱体高度减去实际测量距离的结果就是液位实际高度,这些公式都可以被写入程序中。
3 WINCC人机控制系统画面组态
3.1 WINCC系统概述
Wincc是进行快速组态的HMI系统,是基于Microsoft的32位操作系统,从其他方面看,它是一种可以无限延伸的系统平台,并且wincc可以模块性和灵活性地完成自动化任务,为过程数据的报表、采集和归档以及为用户自由定义的应用程序的协调集成提供了系统模块。
本文采用的wincc版本为6.0,该wincc对用户所添加的任何形式的扩充接口是开放的,并且接口的开放是建立在wincc的模块结构及其强大的编程接口上的,可以利用wincc的ActiveX控件与程序块之间建立数据连接,实现搅拌箱的人机交互功能。
3.2 变量组态
针对搅拌箱控制系统的变量,首先要做好1#和2#搅拌箱的液位设置值和实际值的变量的组态,wincc系统通常是无过程驱动程序连接的内部变量、具有过程驱动程序连接的wincc变量以及在编制的C动作、项目函数等中的C变量。
为了实现搅拌箱设定值的更改,使用两个Windows对象按钮,这样就可以通过事件驱动的按钮来更改设定值。当用鼠标按下按钮时,内部变量会有一个增量,增量是预先指定的,运行期间不可改变。设定值的更改可以通过一个项目函数来实现,并且I/O域的输出值与内部变量相连。
3.3 画面组态
3.3.1 建立文本输入的对话框
(1)在变量管理器中,创建两个16位字符集类型的文本变量,组态执行文本输入的画面,对智能对象中的I/O域进行组态。
(2)在其画面的组态对话框中,选择一个变量,并将属性的输出/输入数据格式设置为字符串。
(3)建立变量之间的直接链接,在画面属性中调整画面窗口的大小,使其与刚才创建的画面的大小相匹配。
3.3.2 建立棒图显示
在对象选项中分别选择两个棒图插入到画面中,利用棒图属性的几何结构来设置合适的大小,建立棒图显示和变量之间的链接,考虑到搅拌箱的高度为1.2m,所以要显示的最大值为1.6m。
打开棒图组态对话框,输入期望变量的名称或者打开变量的路径进行选择,棒图的显示数值可以通过嵌入变量动态显示。
棒图对象可以通过显示标尺标注,标尺的布局和分度以及标签的大小和格式可以通过按需改变相关属性来组态。
4 结束语
以上是搅拌箱检测和控制装置的工作原理,以及和人机界面建立的控制联络,通过将以上装置添加到设备运行过程中,极大地降低生产原材料的浪费,节约公司劳动力成本,提高设备运行稳定性。
[1] 陈海霞.西门子S7-300/400PLC编程技术及工程应用机械工业出版社,2011.
[2]深入浅出西门子winccv6.北京航空航天大学出版社.
收稿:2013-12-16
