基于多普勒Chirp-Fourier变换的水下航行器噪声源定位方法
2014-06-02杨益新吴姚振
田 丰 杨益新 吴姚振 杨 龙
基于多普勒Chirp-Fourier变换的水下航行器噪声源定位方法
田 丰 杨益新*吴姚振 杨 龙
(西北工业大学航海学院 西安 710072)
通过对水下航行器辐射噪声的多普勒特征分析,可以定位线谱噪声源在航行器上的辐射位置,从而有针对性地采取治理措施。传统的多普勒分析方法大多在时频域中进行,难以有效处理同频声源的定位问题。该文提出一种基于Chirp-Fourier变换特征的多普勒分析方法,将多普勒信号分解为线性调频(LFM)子分量的集合,并转换到频率-调频因子构成的2维平面。利用该平面内的多普勒信号分布特征,可以有效抑制同频声源之间的相互干扰,进而完成多噪声源的定位。仿真和海上实验验证了该方法的有效性。
水下信息处理;噪声源定位;水下多普勒信号;Chirp-Fourier变换;频率-调频域
1 引言
水下运动航行器的辐射噪声频谱由离散的线谱和连续分布的宽带谱组成。其中的线谱成分主要来源于航行器内部机械设备的低频往复运动,一般比较稳定而且相对连续谱的强度较高,在水下传播损失较小,通常携带了明显的航行器个体特征,是水声检测和识别的重要信息源[1,2]。因此,需要通过水声测量方法准确定位低频线谱噪声源在航行器表面的辐射部位,以便于有针对性地采取减震降噪措施,从而提高航行器的声隐身性能。目前采用的水下航行器噪声源定位方法主要包括通过特性法、方位角估计方法以及多普勒分析方法等。

针对水下航行器同频辐射噪声源的定位分辨问题,本文提出了一种基于多普勒Chirp-Fourier变换特征分析的噪声源定位方法。该方法将多普勒信号由时频域转换到频率-调频因子构成的2维平面,使多普勒信号分解为多个LFM子分量的组合。通过对多普勒信号的LFM子分量在频率-调频平面上分布特征的提取,可以有效抑制声源之间的相互干扰,并且准确估计各声源的多普勒参数,进而定位各噪声源的辐射位置。多噪声源环境的仿真算例分析表明,该方法对于水下航行器表面的多个同频或相近频率声源的定位分析具有良好的分辨和估计性能。海上实测数据验证了方法的有效性。
2 测量系统模型

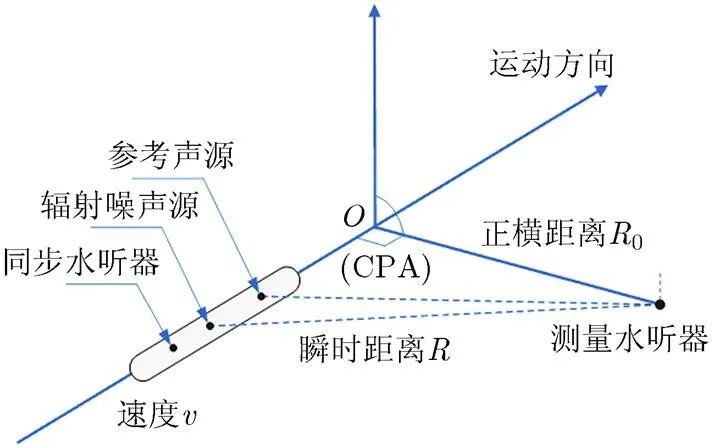
图1 噪声源定位测量系统示意图
由于声源和接收端之间延时的非线性变化,接收信号产生多普勒效应,可表示为


3 多普勒信号的Chirp-Fourier分解特征
3.1 Chirp-Fourier变换的分解原理
Chirp-Fourier变换(CT)是一种Chirplet基函数参数化时频分析方法,常用于多线性调频信号分量参数分析[13],可以表示为



3.2 多普勒信号的Chirp-Fourier分解特性
多普勒信号的CT分解比较复杂,很难直接精确推导其在频率-调频面上分布的完整数学表达式。然而多普勒信号中任意时刻的局部能量分布,都是其某部分LFM子分量作用的结果。因此,只需要研究构成中心时刻的那部分LFM子分量的特征,就可以获得完整的多普勒中心时刻信息,从而达到简化信号分析的目的。

4 基于多普勒频率-调频分布特征的噪声源定位方法
4.1混合LFM信号的频率-调频平面分布特征
多普勒信号中包含了相交的LFM子分量信号,且交点为多普勒中心点。因此,相交的混合LFM信号与多普勒信号在频率-调频平面上具有相同分布特征。研究混合LFM信号在频率-调频2维平面上的分布规律,提取其中所包含的LFM信号交点信息,也就得到了多普勒信号的频率-调频分布特征,从而估计出多普勒信号的中心参数。





图2 交点位于时间段中点的混合LFM信号


4.2多普勒信号的频率-调频平面分布特征


图3 交点与时间中点不重合的混合LFM信号
4.3同频噪声源的多普勒CT分解定位方法

5 仿真性能分析
为了考察算法的声源定位分辨性能,设置了多噪声源仿真环境,并与短时傅里叶变换(STFT)和Wigner-Ville分布(WVD)时频分析方法进行对比。仿真中的统一条件设置为:运动速度3 m/s,正横距离20 m,水中声速1500 m/s,信号采集时长80 s,采样率1 kHz。各仿真中,两信号CPA分别为32 s和48 s,信号幅度相同,单个信号的信噪比为6 dB。
仿真1 两个信号频率存在微弱差异,为50.00 Hz和49.90 Hz。图5(a)为其STFT处理结果,图5(b)为WVD的处理结果。这两种分布均产生了严重混叠,不能反映真实的能量分布状态。图5(c)为CT分布效果,虽然存在信号间干扰,但是依然能有效分辨信号并提取参数。
仿真2 两个信号中心频率完全相同,均为50.00 Hz。各算法处理结果如图6所示,信号的STFT和WVD出现了严重的失真和畸变,而CT分解结果能获得良好的分辨效果。估计处理结果如表1所示。可以看出,针对同频声源形成的窄带内混叠多普勒信号,CT分解方法具有良好的处理性能,可以有效定位声源的辐射位置。
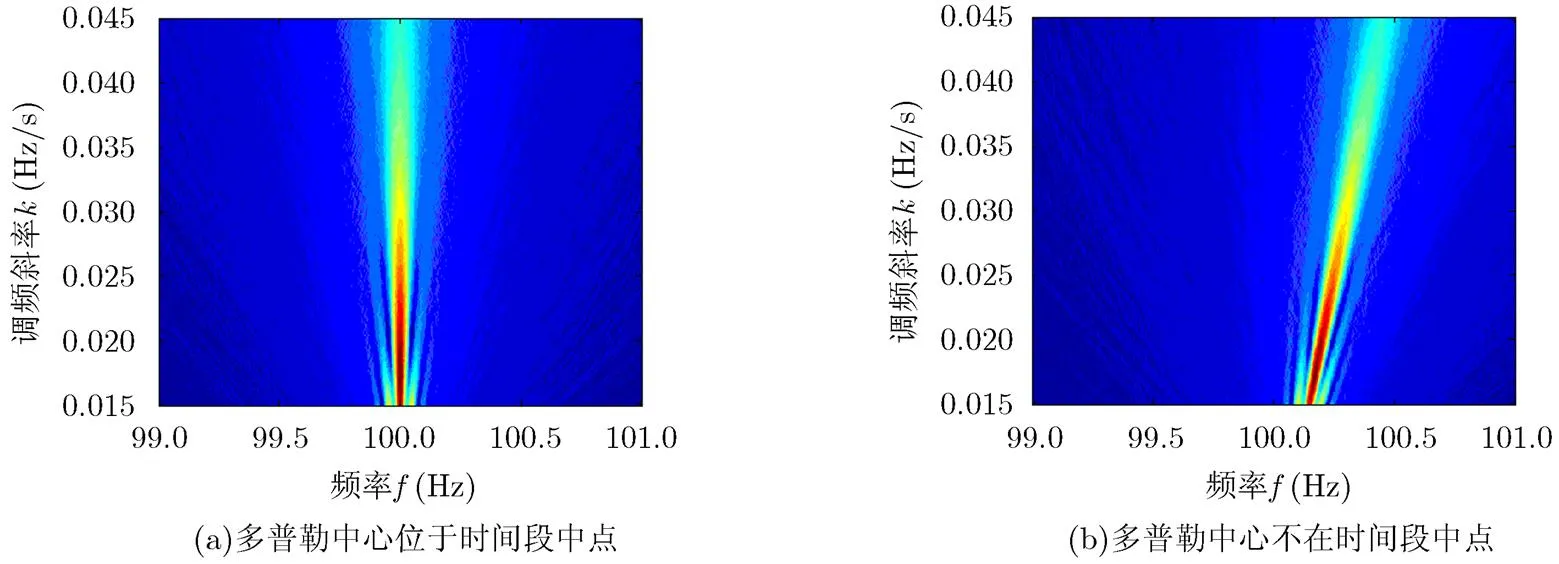
图4 多普勒信号的CT分布效果

图5 相近频率声源的多普勒分布与处理
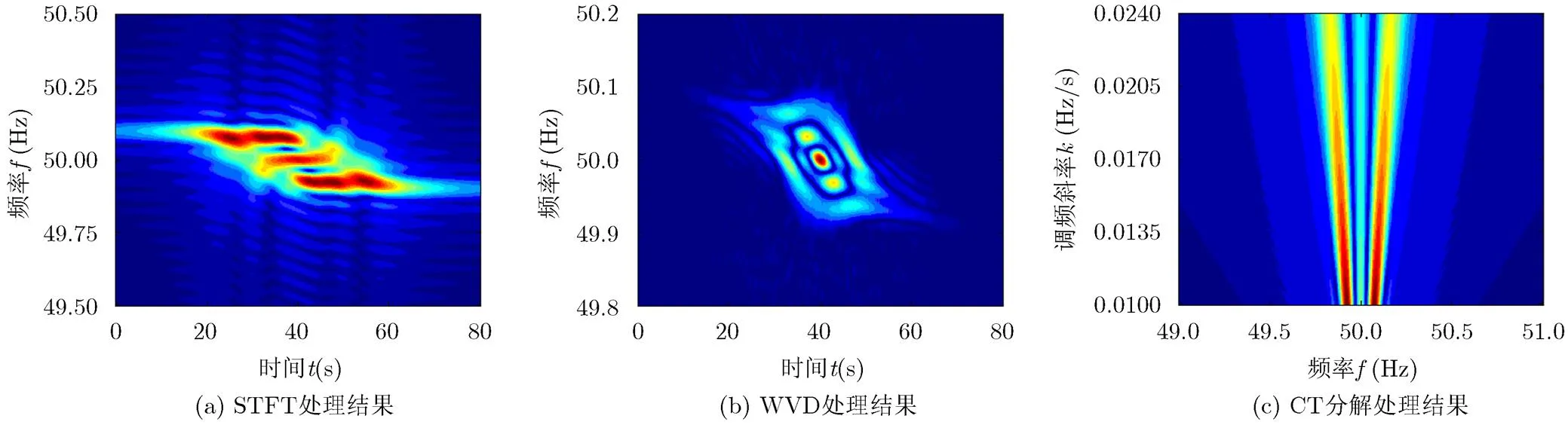
图6 同频率声源的多普勒分布与处理
表1各仿真参组及估计性能对比

仿真组信号频率(Hz)CPA误差(s)定位误差(m) 仿真1信号150.000.170.51 信号249.900.220.66 仿真2信号150.000.431.32 信号250.000.320.96
6 海测数据分析
海上验证试验于2012年在大连附近海域进行。接收端水听器位于水线下10 m。发射平台布置参照图1,搭载低频和高频发射换能器,作为模拟辐射声源和参考声源。两声源分别固定于船体中轴线上的两个可升降支架底部,间距为19.2 m,试验时均放入水线下6 m。为避免船体谐振,发射信号频率为55 Hz,采用5 kn航速工况。实测正横距离为33.9 m,运动速度为2.93 m/s。为了验证同频多声源的处理性能,将采集信号延时8.2 s后与原信号叠加,以模拟距离为24 m的同频声源接收效果。对延时叠加后的数据进行处理,如图7所示。可以看出,STFT和WVD均无法对混叠信号进行有效分辨,而CT能清晰分辨两个信号,估计结果如表2所示。可以看出,CT变换的频率-调频分析方法能有效提取同频信号的多普勒CPA时刻参数,并且完成各声源的定位处理。

图7 实测低频声源多普勒信号的处理效果
表2实测声源的CT处理定位结果

单声源处理模拟双声源处理 信号55 Hz信号55 Hz原始信号55 Hz延时信号 CPA时刻误差(s)0.250.410.52 定位误差(m)0.731.191.52
7 结论
本文基于水下目标辐射噪声中线谱的多普勒频移特征,提出了一种基于CT的多噪声源多普勒分析方法,将运动声源产生的多普勒信号转换到频率-调频因子构成的2维平面,并分解为多个LFM分量的组合。通过多普勒信号在频率-调频2维平面内分布特征的提取,可以得到多普勒信号中LFM分量的时频交点信息,从而估计出声源的辐射频率和多普勒CPA时刻,结合测量系统完成对噪声源的定位。该方法在接收端仅需单个水听器即可处理,具有良好的实际应用性能。多噪声源环境的仿真算例分析表明,该方法对于混叠的窄带多分量多普勒信号具有良好的分辨和估计性能,可有效处理同频或相近频率的声源,具有一定的工程实用价值。最后通过海上实测数据验证了方法的有效性。
[1] 陈阳, 王自娟, 朱代柱, 等. 一种基于频率方差加权的线谱目标检测方法[J]. 声学学报, 2010, 35(1): 76-80.
[2] Abrahamsen K. The ship as an underwater noise source[C]. Proceedings of Meetings on AcousticsEdinburgh, 2012: 70058-70061.
[3] 高伟, 陈川. 基于辐射噪声强度和线谱多普勒的目标运动参数估计[J]. 声学技术, 2010, 29(4): 374-379.
Gao Wei and Chen Chuan. Target motion parameters estimation based on radiated noise intensity and Doppler frequency shift of line spectrum[J].. 2010, 29(4): 374-379.
[4] 王志伟, 徐灵基, 杨益新, 等. 直线阵识别水下运动目标噪声源方法研究[J]. 振动与冲击, 2012, 31(19): 118-122.
Wang Zhi-wei, Xu Ling-ji, Yang Yi-xin,..Identification of noise sources of an underwater moving target based on a linear array[J]., 2012, 31(19): 118-122.
[5] 赵闪, 孙长瑜, 陈新华, 等. 一种改进的被动合成孔径算法用于舰船辐射噪声检测[J]. 电子与信息学报, 2013, 35(2): 426-431.
Zhao Shan, Sun Chang-yu, Chen Xin-hua,.. An improved passive synthetic aperture sonar algorithm application for detecting of the ship radiated noise[J]., 2013, 35(2): 426-431.
[6] Xu Ling-ji, Yang Yi-xin, and Tian Feng. Doppler method for identification of noise sources on underwater moving target[C]. Asia Pacific Signal and Information Processing Association Annual Summit and Conference, Xi’an, 2011: 83-88.
[7] 田丰, 杨益新, 吴姚振, 等. 窄带细化Wigner-Ville分布分析的快速实现方法[J]. 电子与信息学报, 2013, 35(7): 1713-1719.
Tian Feng, Yang Yi-xin, Xu Ling-ji,..Fast Realization of Zoom-spectrum Wigner-Ville Distribution Analysis in a Narrowband[J]., 2013, 35(7): 1713-1719.
[8] 吴国清, 马力. 利用辐射噪声多线谱的多普勒进行距离估计[J]. 声学学报, 2006, 31(2): 140-145.
Wu Guo-qing and Ma Li. Range estimation by Doppler of multi-time in radiated noise spectrum[J]., 2006, 31(2): 140-145.
[9] Tam K C, Tang S K, and Lau S K. On the recovery of moving source characteristics using time--frequency approach[J]., 2012, 73(4): 305-314.
[10] Tian Feng, Yang Yi-xin, and Xu Ling-ji. Doppler parameters estimation by short time Chirp Fourier transform[C]. 2011 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, 2011: 76-81.
[11] 徐灵基, 杨益新. 瞬时频率估计的水下运动目标参数估计方法[J]. 哈尔滨工程大学学报, 2013, 34(9): 1089-1093.
Xu Ling-ji and Yang Yi-xin. Parameter estimation of underwater moving object based oninstantaneous frequency estimate[J].. 2013, 34(9): 1089-1093.
[12] Wang Yong. Time-frequency approach to underdetermined blind source separation[J]., 2012, 32(2): 306-316.
[13] Peng Zhi-ke, Meng Guang, Chu Fu-lei,.. Polynomial chirplet transform with application to instantaneous frequency estimation[J]., 2011, 60(9): 3222-3229.
[14] Yang Yang, Zhang Wen-ming, Peng Zhi-ke,.. Multicomponent signal analysis based on polynomial chirplet transform[J]., 2013, 60(9): 3948-3956.
[15] Yousef Zanjireh, Amir Hossein Rezaie, and Hamidreza Amindavar. Multi component signal decomposition based on chirplet pursuit and genetic algorithms[J]., 2013, 74(12): 1333-1342.
田 丰: 男,1983年生,博士生,研究方向为水下信息处理、噪声源定位.
杨益新: 男,1975年生,教授,博士生导师,研究方向为阵列信号处理、水声信号处理.
吴姚振: 男,1986年生,博士生,研究方向为水下信息处理.
Localization of Noise Sourceson Underwater Vehicle via Chirp-Fourier Processing
Tian Feng Yang Yi-xin Wu Yao-zhen Yang Long
(,,710072,)
The radiated noise sources of underwater vehicle can be localized by analysis of Doppler information. Then effective suppression of noise can be taken. However, traditional time-frequency methods can hardly distinguish the Doppler shift of noise sources with a single frequency. In this paper, a method of multi-Doppler signals analysis based on Chirp-Fourier transform is presented. The Doppler signal is decomposed into a sum of Linear Frequency Modulate (LFM) components, and transformed into two-dimensional frequency-modulate factor domain. Then the location of multiple noise sources can be estimated by the extracted Doppler information and the interference caused by single frequency sources can be suppressed. Computer simulation and experimental result at sea demonstrate the validity of the proposed method.
Underwater signal processing; Localization of noise sources; Underwater Doppler signal; Chirp-Fourier transform; Frequency-modulate factor domain
TB566
A
1009-5896(2014)12-2889-07
10.3724/SP.J.1146.2014.00106
杨益新 yxyang@nwpu.edu.cn
2014-01-15收到,2014-04-18改回
国家自然科学基金(11274253)资助课题
