多激励识别的自适应延迟逆系统方法
2014-05-25李玩幽率志君
周 盼,李玩幽,率志君
(哈尔滨工程大学动力与能源工程学院,哈尔滨 150001)
多激励识别的自适应延迟逆系统方法
周 盼,李玩幽,率志君
(哈尔滨工程大学动力与能源工程学院,哈尔滨 150001)
针对现有逆系统方法依赖状态空间模型的缺点提出采用系统自适应延迟逆模型识别多激励时间历程。采用自适应算法对系统进行延迟逆模型辨识,结合逆模型利用工作状态响应数据识别时域载荷。以简支梁为研究对象用无噪声干扰、有噪声干扰加速度响应识别多点稳态激励及多点非稳态激励。仿真结果表明,噪声干扰时识别精度有所降低,但较满意,验证该方法对多激励源识别的可行性。
振动;时域载荷识别;自适应延迟逆模型;时间延迟
动态载荷不仅为机械设计的原始依据亦为结构动力修改与优化依据,其识别问题广受关注[1]。载荷识别主要有频域、时域方法。频域法只需对系统特性矩阵作逆运算即可,较易实现,但只能识别线性系统的稳态激励;而时域法不仅适用于线性系统,亦适用于非线性系统,且能有效处理瞬态冲击激励的识别问题,其研究不断深入。
逆系统法为由魏星原等[2]提出的时域识别方法。利用系统输入输出信息建立自回归滑动平均(ARMA)逆模型求解输入激励,将载荷识别逆问题转化为正问题处理;但线性系统只在可逆、稳定、能控、能观条件下存在逆系统,因而该方法应用受到限制。鉴于逆系统存在条件苛刻缺点,Steltzner等[3]采用截断奇异值分解法(TSVD)计算由Markov参数构成的系统特性矩阵的伪逆建立的非因果逆向滤波器(Inverse Structural Filter,ISF),进而识别结构所受载荷时间历程;但ISF可能不稳定,对此Allen等[4]以系统状态空间模型为基础,提出改进算法-延迟多步逆向滤波器(Delayed,Multistep ISF,DMISF)识别时域载荷。Nordström等[5]基于系统离散状态空间模型,研究对位系统(collocated system)、非对位系统(non-collocated system)载荷识别问题,并用时间延迟方法将非对位系统载荷识别病态问题转化为良态问题。因逆系统方法发展过程中基本未脱离系统状态空间模型,需先了解系统先验知识,故限制逆系统方法的应用。
基于此,本文提出基于自适应延迟逆模型的时域识别方法。采用自适应横向滤波器模拟逆模型,不依赖状态空间模型,无需掌握系统数学模型;在逆向建模过程中无需对特性矩阵逆运算,可避免求逆过程中的病态问题。
1 载荷识别原理
基于延迟逆模型的载荷识别方法以某准则(如均方误差最小或加权误差平方和最小)为依据建立系统的延迟逆模型,以实际激励的系统响应信号为逆模型输入,逆模型输出即为实际激励的延迟估计值。
1.1 延迟逆模型辨识原理
建立准确系统逆模型、使其能真实反映系统的逆特性为时域载荷识别的前提条件。本文采用有限脉冲响应(finite impulse response)自适应横向滤波器模拟系统逆模型。自适应滤波器由自适应线性组合器与单位延迟单元组成,见图1。
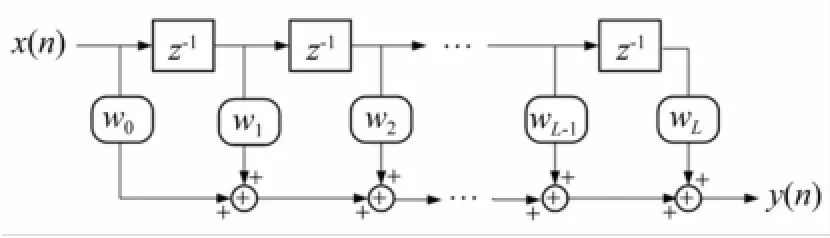
图1 有限脉冲响应滤波器Fig.1 Finite impulse response filter(FIR filter)
采样时刻n的输出信号y(n)与输入信号关系为
式中:L+1为自适应滤波器长度。
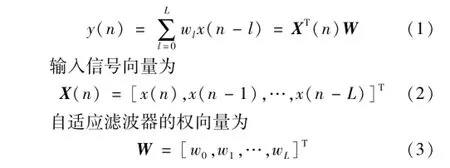
用自适应滤波器模拟逆模型,SISO系统延迟逆模型辨识原理图见图2。将机械系统在白噪声激励fw(n)下响应信号xw(n)作为逆模型输入信号,逆模型输出信号f0(n)与延迟激励fd(n)之差定义为误差信号e(n),调整自适应滤波器权向量,实现满足某准则的最优滤波。
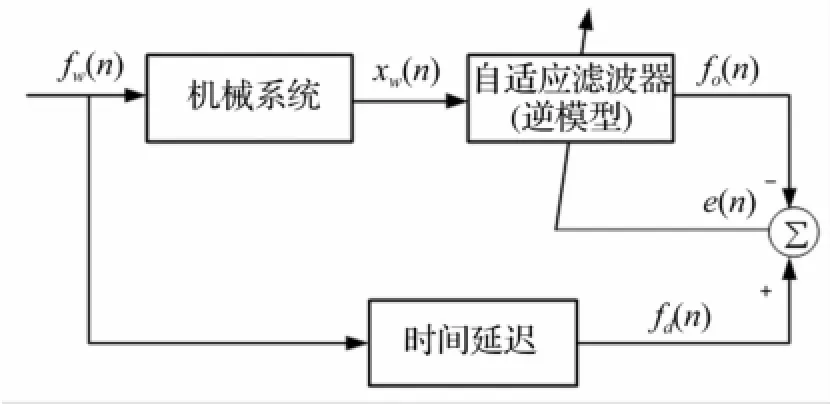
图2 SISO系统延迟逆模型辨识原理图Fig.2 Schematic diagram of delayed inversemodel identification for SISO system
由图2,n时刻逆模型输出信号f0(n)为
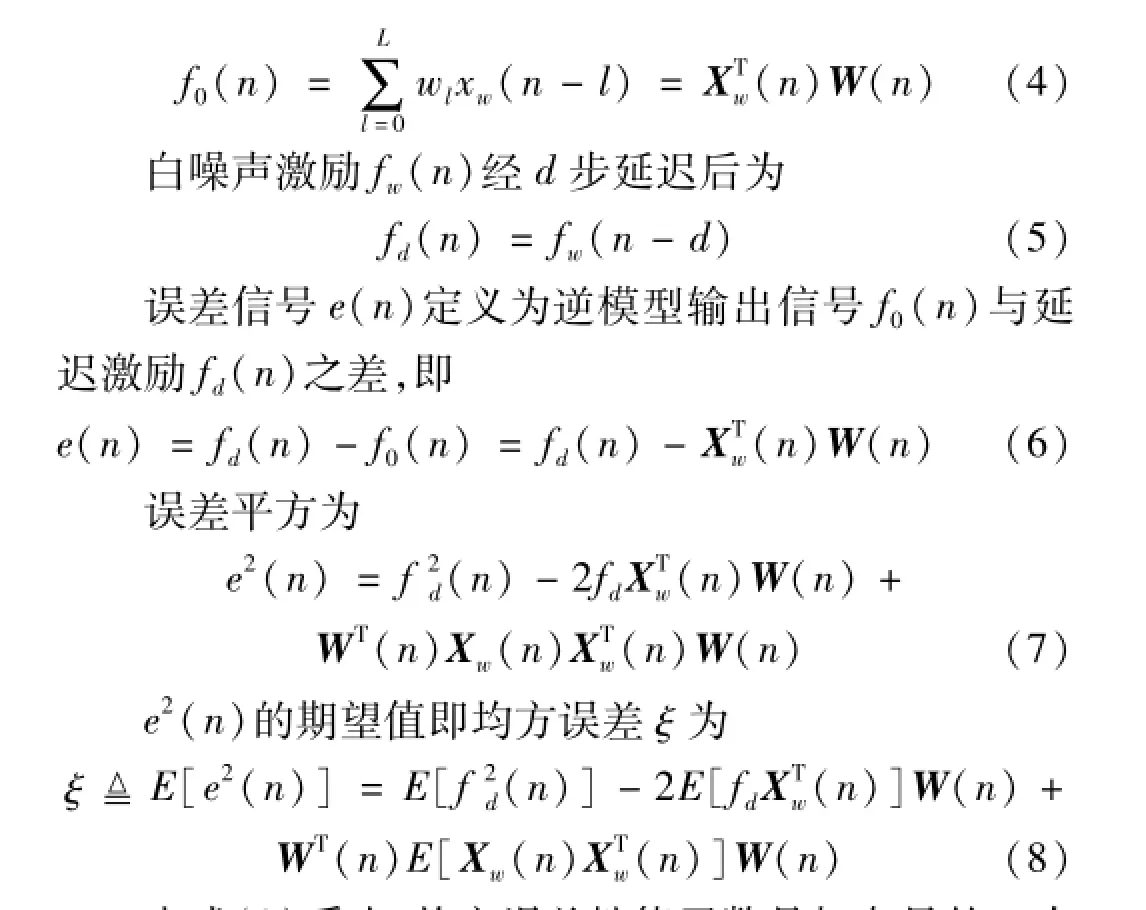
由式(8)看出,均方误差性能函数是权向量的二次型函数,具有“碗状形”曲面,自适应过程即为连续不断调节权向量寻求碗底部。本文采用归一化LMS(Normalized Least Mean Square,NLMS)算法[6]调整自适应滤波器权向量,n+1时刻权向量W(n+1)由n时刻权向量W(n)更新获得,即

式中:μ为收敛因子;γ∈[0,1]为泄露因子。
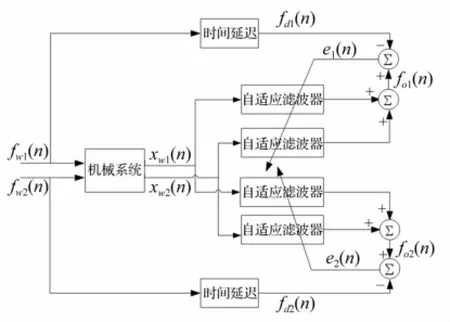
图3 双输入双输出系统延迟逆模型辨识Fig.3 Delayed inversemodel identification for double-input-double-output system
对多输入多输出(MIMO)系统,其延迟逆模型建模方法与SISO系统类似。对单输入激励单输出响应的SISO系统,单个自适应滤波器即能描述逆模型振动特性;但对MIMO系统则需建立每个输入、输出间关系才能完整描述逆系统振动特性。以双输入双输出系统为例,其延迟逆模型建模原理见图3,采用4个自适应滤波器模拟该双输入双输出系统延迟逆模型。该延迟逆模型两输出信号fo1(n),fo2(n)与输入信号xw1(n),xw2(n)(机械系统输出响应)间关系可表述为
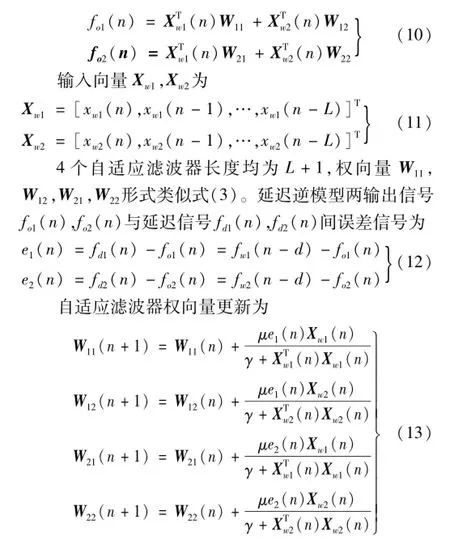
自适应过程收敛时延迟逆模型辨识过程完成。在逆模型辨识过程中加入延迟环节,可得系统延迟逆模型。对图2、图3中时间延迟进行说明。若无时间延迟环节,对最小相位系统(系统零极点均位于Z平面单位圆内)其逆是稳定的、因果的;然而对非最小相位系统(系统零点有的位于Z平面单位圆外)因不稳定零点存在,逆模型不稳定。因此需引入合适的时间延迟以获得稳定的延迟逆模型[7-8],亦可获得更小均方误差。

图4 有噪声干扰的SISO系统延迟逆模型辨识Fig.4 Delayed inversemodel identification for SISO system under noise disturbance condition
理论研究表明,无噪声干扰时图2中最小均方误差为零,此时自适应滤波器权向量能准确反映系统的时域逆特性[9];但当系统响应中存在噪声干扰时,用图2辨识SISO系统的延迟逆模型会导致较大误差,应按图4对延迟逆模型进行辨识[10]。先进行系统辨识,再由系统正模型对延迟逆模型进行自适应建模。所得正模型基本与机械系统动态响应相同,但不受噪声干扰,故可求得不受噪声干扰的延迟逆模型。对MIMO系统而言,有噪声干扰时其延迟逆模型辨识过程与SISO系统类似。
1.2 基于延迟逆模型的载荷识别
系统延迟逆模型建模完成后即可进行载荷识别。将系统在实际激励状态下响应信号xm(n)作为延迟逆模型输入,则逆模型输出fe(n)即为实际激励延迟估计。SISO系统时域载荷识别原理见图5。

图5 SISO系统时域载荷识别Fig.5 Real time load estimation for SISO system
逆模型输出信号fe(n)可表示为响应信号与延迟逆模型权值的乘积之和,即

式中:W为延迟逆模型辨识过程中由式(9)所得权向量。
由于延迟逆模型实际为系统非因果逆模型,因此采用过去、未来时刻响应识别当前时刻激励。
2 载荷识别仿真研究
以两端简支梁为研究对象进行多激励源识别仿真研究。简支梁几何参数及材料属性见表1。
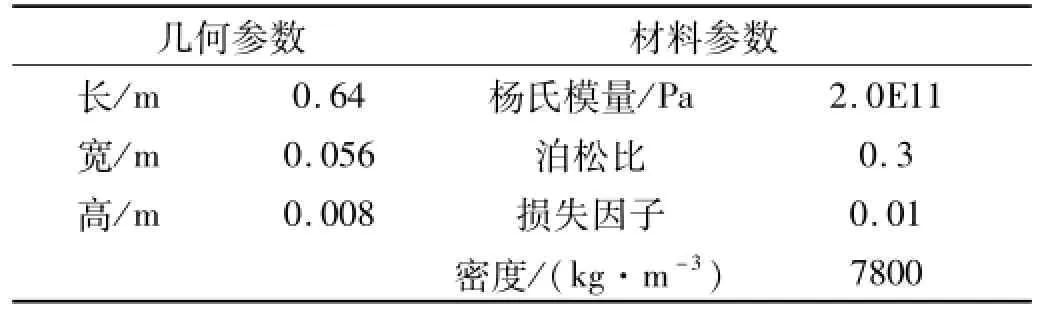
表1 简支梁几何参数及材料参数Tab.1 Geometric and material param eters of sim p ly supported beam
激励力F1作用于简支梁0.5 m处,F2作用于0.2 m处。用0.3 m、0.1 m位置处加速度响应识别两激励力,见图6。加速度测点位置与激励位置不同,为典型非对位系统,属非最小相位系统。因此,时间延迟环节不能省略,对逆模型稳定性及准确性至关重要。
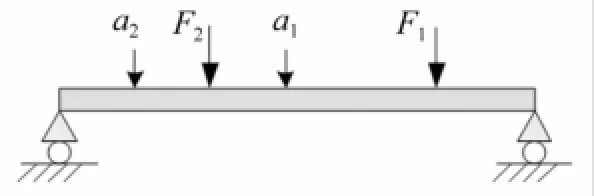
图6 激励力及响应测点位置Fig.6 Locations of excitation and response points
2.1 无噪声干扰识别结果
由图3的辨识无噪声干扰时双输入双输出系统延迟逆模型。为尽可能准确模拟宽频范围内系统逆特性,选白噪声信号作为激励形式,用Matlab软件中randn实现。采用lsim命令求解该系统在两白噪声激励下响应测点位置加速度(图6)。仿真中设定时间分辨率1E-5 s,自适应滤波器长度600,时间延迟320,收敛因子0.2,泄露因子1。待识别单频激励、冲击激励(半正弦激励)表达式为


用加速度响应识别单频激励、冲击激励及白噪声激励,结果见图7。分析图7知,无噪声干扰时该方法能准确识别单频、白噪声激励。冲击激励识别结果与真实结果基本吻合,但在主峰两侧存在小旁瓣,说明延迟逆模型不完善。可通过增加自适应滤波器长度进行改善。
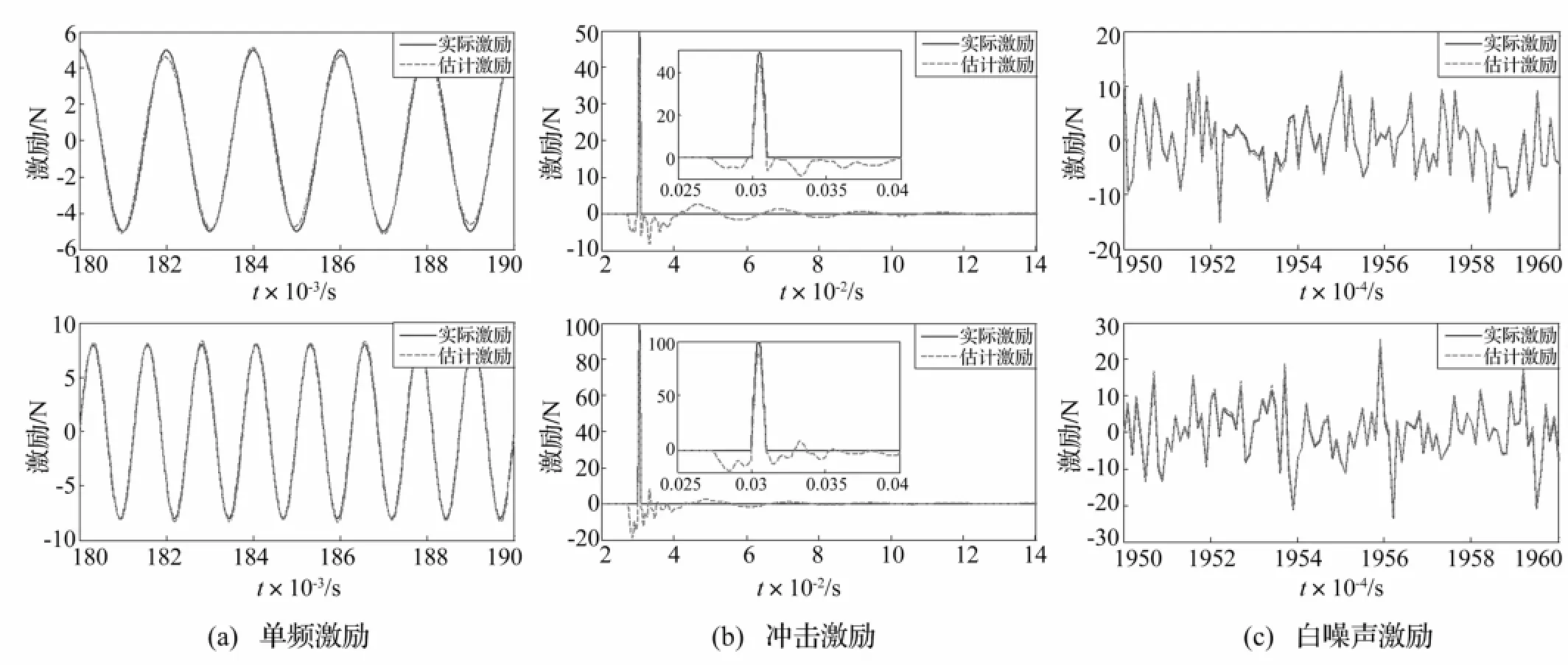
图7 两点激励识别结果Fig.7 Reconstruction result of two input forces
图8 两点激励识别结果Fig.8 Reconstruction result of two input forces
无噪声干扰激励识别结果说明,基于延迟逆模型的载荷识别方法能识别稳态激励及非稳态激励,从而可验证该方法的可行性。
2.2 有噪声干扰识别结果
对实际工程环境,测试响应中会存在噪声干扰,需研究噪声干扰对时域方法识别精度影响。本文所用噪声模型[11-12]噪声幅值为响应均方根值的10%,含噪声干扰的响应可表示为

式中:nt为数据点数目;x为真实响应向量;η为由均值0方差1的正态分布随机数组成长度nt的向量。
用噪声干扰模型对加速度响应添加噪声,按图4进行延迟逆模型辨识并识别时域激励。仿真时间分辨率1E-5 s,正模型长度1 500,逆模型长度600,延迟320。不同形式激励识别结果见图8。由图8看出,噪声干扰较大时,激励识别精度较无噪声降低,但能满足工程需要。对正弦激励,识别的幅值、相位与真实激励基本一致,但存在较多毛刺,由响应中噪声所致。白噪声激励识别结果与真实激励吻合较好,此因其与用于系统逆模型辨识激励形式一致。冲击激励幅值结果较准确,但主峰两侧存在小旁瓣。
3 载荷识别试验研究
对双层隔振系统进行载荷识别试验研究,验证本文所提时域识别方法的有效性、可行性。双层隔振系统试验台架见图9。用弹簧吊装激振器,信号发生器产生激励信号,通过功率放大器输给激振器,再通过激振杆将激振力传递给双层隔振系统作用于上层质量结构。通过力传感器、加速度传感器采集激振力信号及结构加速度响应。
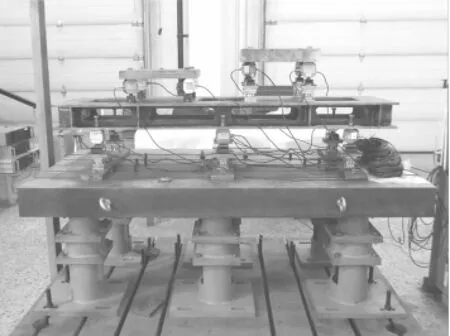
图9 双层隔振系统试验台架Fig.9 Two-stage vibration isolation system test bench
逆模型权向量长度300,时间延迟160。单频激励、伪随机激励识别结果见图10。分析图10知,该方法能较准确识别正弦激励及伪随机激励。
4 结 论
(1)采用自适应延迟逆模型识别作用于简支梁的多点激励,通过研究响应中干扰噪声对识别精度影响,验证本文识别方法的有效性。
(2)该识别方法不仅适用于稳态、瞬态激励,且在有噪声干扰时亦能获得较准确的激励识别结果。
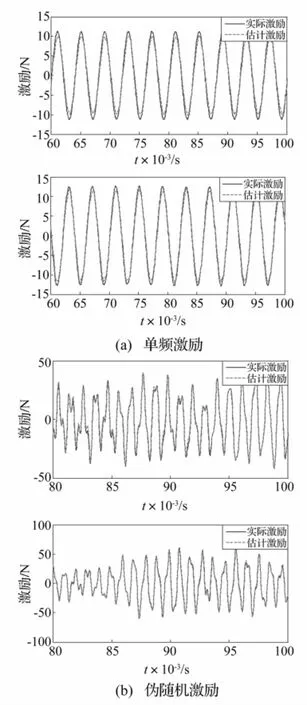
图10 不同激励形式下激励识别结果Fig.10 Estimated results of operational forceswith different excitation types
(3)该识别方法原理简单,无需对系统特性矩阵求逆运算,可避免病态问题;对缺少先验知识系统辨识时更具优势。
[1]吴淼,黄民.机械系统的载荷识别方法与应用[M].北京:中国矿业大学出版社,1995.
[2]魏星原,宋斌,郑效忠.载荷识别的逆系统方法[J].振动、测试与诊断,1995,15(3):37-43.
WEIXing-yuan,SONG Bin,ZHENG Xiao-zhong.A method of inverse system to identify force[J].Journal of Vibration,Measurement&Diagnosis,1995,15(3):37-43.
[3]Steltzner A D.Input force estimation,inverse structural system and the inverse structural filter[D].The University of W isconsin-Madison,Ph.D thesis,1999.
[4]Allen MS,Carne T G.Delayed,multi-step inverse structural filter for robust force identification[J].Mechanical Systems and Signal Processing,2008,22(5):1036-1054.[5]Nordstrm L JL,Nordberg TP.A time delaymethod to solve non-collocated input estimation problems[J].Mechanical Systems and Signal Processing,2004,18:1469-1483.
[6]Haykin S.Adaptive filter theory(third edition)[M].Prentice Hall,1996.
[7]Widrow B.Adaptive inverse control[C].//IFAC Adaptive Systems in Control and Signal Processing,Lund,Sweden,1986.
[8]Widrow B,Plett G L.Adaptive inverse control based on linear and nonlinear adaptive filtering[C].//Proceedings of InternationalWorkshop on Neural Networks for Identification,Control,Robotics and Signal/Image Processing,1996:30-38.
[9]Widrow B,Stearns S D.Adaptive signal processing[M].Prentice Hall,1985.
[10]Widrow B,Walach E.Adaptive inverse control,reissue edition:a signal processing approach[M].Wiley-IEEE Press,2007.
[11]Steltzner A D,Kammer D C.Input force estimation using an inverse structural filter[J].17th International Modal Analysis Conference(IMAC XXVII),Kissimmee,1999,3727(2):954-960.
[12]Steltzner A D,Kammer D C,Milenkovic P.A time domain method for estimating forces applied to an unrestrained structure[J].Journal of Vibration and Acoustics,2001,123:524-532.
Adaptive delayed inverse system method for reconstruction ofmultiple input excitations
ZHOU Pan,LIWan-you,SHUAIZhi-jun
(Harbin Engineering University,College of Power and Energy Engineering,Harbin 150001,China)
An adaptive delayed inverse model of mechanical system was adopted to determine time histories of multiple input forces aiming at improving the shortcoming that the existing inverse system method relies on the state-space model.An adaptive algorithm was applied to identify the delayed inversemodel,followed by time domain force estimation using operational response data combined with the inversemodel ofmechanical system.Themulti-input forces of a simply supported beam were reconstructed by using accelerations without and with noise disturbances.The simulation results illustrate that the reconstruction accuracy decreases under noise condition,yet isstill relatively satisfied and themethod for multi-input identification is feasible.Furthermore,the method was validated experimentally.
vibration;time domain force estimation;adaptive delayed inversemodel;time delay
TU312;O327
:A
10.13465/j.cnki.jvs.2014.22.008
国家自然科学基金(50979016);中央高校基本科研业务费专项资金项目(HEUCFZ1115)
2013-07-24 修改稿收到日期:2013-11-15
周盼女,博士生,1986年11月生
李玩幽男,博士,教授,博士生导师,1972年10月生邮箱:hrbeu_ripet_lwy@163.com
