水下高速目标航行参数遥测技术研究
2014-05-17张庆国王健培
张庆国,王健培
(昆明船舶设备研究试验中心,云南昆明 650051)
0 引 言
实时获得水下目标的航行参数信息,有利于对其工作状态进行监控,并能对其航行/攻击性能进行精确评估。随着高速轻型水下武器的不断发展,如何实时获得其航行参数信息显得尤为重要。
随着水声技术的不断发展,国内外学者对FSK、PSK、OFDM、PATTERN时延编码和扩频通信等技术进行了试验研究,并取得了部分结果[1-6]。但是由于水声信道的复杂性及其理解的局限性,现有水声技术均具有一定的局限性,并非十分有效。因此,针对高速水下目标的航行参数遥测,进行试验研究具有重要意义。本文对比分析了双曲线调频(Hyperbolic Frequency Modulation, HFM)与线性调频(Linear Frequency Modulation, LFM)在水声遥测上的特性,采用单频信号(Continuous Wave, CW)与HFM信号组合调制的方式,进行高速水下目标的航行参数遥测技术与试验研究。
1 调频信号特性分析
研究表明,蝙蝠、海豚等哺乳生物采用了HFM形式的超声信号进行定位与导航[2],从生物进化择优性上来看,HFM具有很高的实用性。HFM信号是一种多普勒不变信号,有时又称为对数相位信号或线性周期信号[3]。为了便于特征分析,本文将HFM信号与水声工程中常用的LFM信号进行对比分析。
1.1 HFM信号分析
HFM信号波形为:

式中:A为信号幅度;T为脉冲宽度;f0为中心频率;m为调制参数。
由公式(1)可知,相位函数和瞬时频率分别为:

假设存在如下关系:

由式(3)可知,k=f0t0。此时,将式(3)代入式(1),可得到如下实信号计算公式:

同理,将式(3)代入式(2)可得

假设信号幅度为A,脉冲信号宽度为T,上限频率及下限频率分别为fH、fL,fH=f(T/2),fL=f( −T/2);调频带宽为B,B=fH−fL。算术中心频率为fm,fm= (fL+fH)/2;时间中心频率为f0,f0=f(0);则式(5)中的参数k与t0分别为:

根据上述公式,产生HFM信号时域波形及时频曲线波形如图1所示。
1.2 LFM信号分析


图1 HFM信号时域波形及时频曲线图Fig.1 HFM signal waveform and time-frequency graph
LFM信号波形为:式中,A为信号幅度,f0为中心频率,l为调频斜率。
由式(7)可知,其相位函数和瞬时频率分别为:

根据上述公式,产生 LFM 信号波形及时频曲线波形如图2所示。
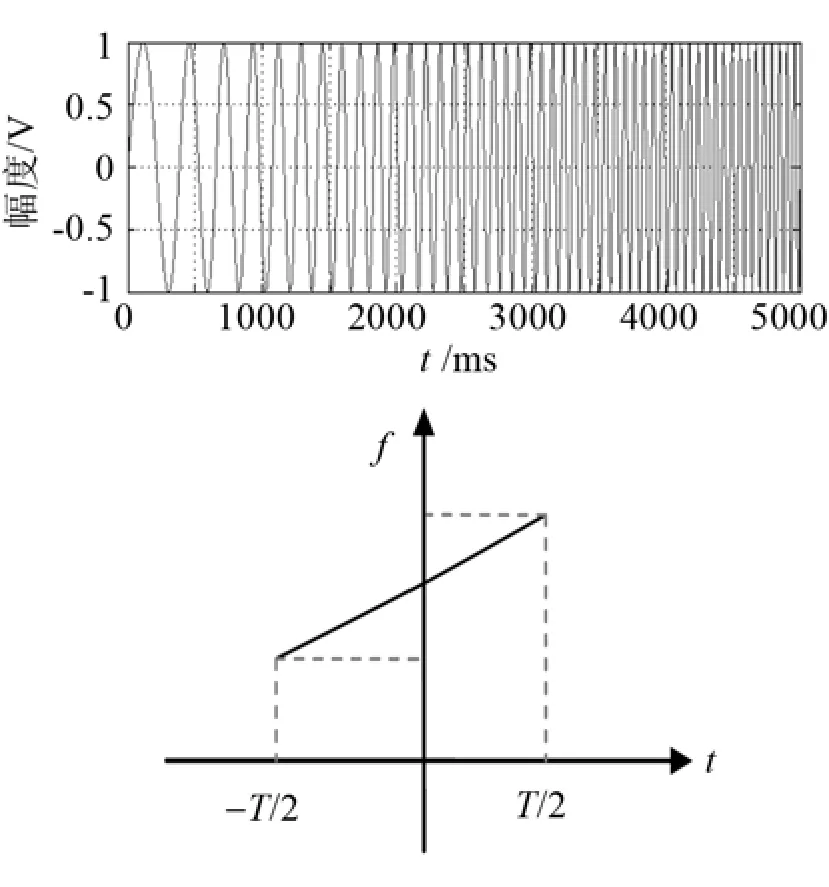
图2 LFM信号时域波形及时频曲线图Fig.2 LFM signal waveform and time-frequency graph
1.3 多普勒特性比对分析
通常情况下,多普勒容限是指信号波形对速度或多普勒频移敏感性的特征分量[4]。水声信号的多普勒容限大小,直接影响着高速水下目标航行参数遥测功能与性能。
假设水下目标与接收端相对速度为v,声速为c,则多普勒频偏系数p= 1+v/c。那么对于HFM信号,在接收端收到的信号瞬时频率存在如下关系:


假设存在时延差 Δt,满足如下关系:
将式(5)代入式(9)可推导出,当 Δt存在如下关系时,满足式(10)。

由式(10)、(11)可以看出,对于HFM信号而言,多普勒压缩效应等效于频率调制函数在时间上的平移和在频率上移动一个固定量,如图3所示。
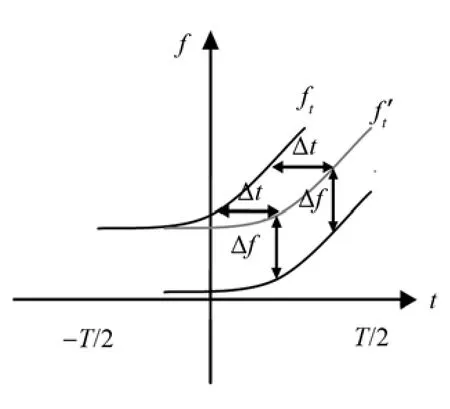
图3 HFM信号在具有多普勒时瞬时频率变化曲线图Fig.3 Instantaneous frequency change of HFM signal with Doppler shift
由图3可知,对于HFM信号的多普勒匹配,只需要改变参考波形的初始时间 Δt,便能与发射端的信号“完全”匹配。
同上,对于 LFM 信号存在相对速度时,接收端接收到的信号瞬时频率为

由于找不到时延差 Δt来满足式(10),LFM信号的f'(t)不能通过平移与原f(t)相重合(不含p≈1时),即 LFM 信号不具备多普勒不变性,而 HFM信号具有多普勒不变性。HFM信号经过水声信道传播后,接收端获得的信号幅度不因与目标存在相对运动而剧烈变化,可最大程度上减少由于水下目标高速运动带来的多普勒效应对水声遥测的影响。
利用对数展开式对公式(1)进行展开如下:

由式(13)可见,当忽略t3以上的各项后,便是LFM的计算公式,也就是说LFM信号是HFM信号的一种特例。
2 航行参数遥测信标波形结构设计
对于水下高速目标的航行参数遥测来说,信标波形的结构设计是其关键技术,直接影响水声遥测基本功能及测量精度。本文采用CW信号与HFM信号相结合的方式组成同步式遥测信标。充分利用HFM信号的多普勒不变性,解决水下目标高速运动带来的多普勒频偏及幅度剧变等问题;同时利用CW信号对频率的敏感性,来提高距离测量精度。所设计的信标波形结构如图4所示。
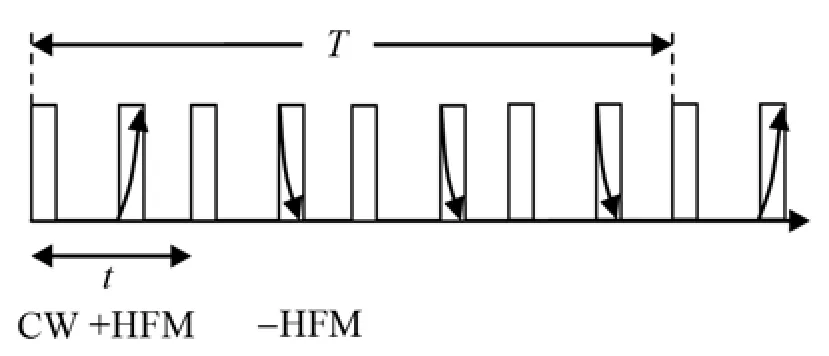
图4 遥测信标波形结构示意图Fig.4 Configuration of telemetry beacon signal
图4中,T为测量周期,T=2 s;t为小周期,t=0.5 s。假设遥测参数(又称姿态角)为:深度值、俯仰角、横滚角和航向角,则分别对应于图4中的四个组合脉冲信号。该信标主要性能为:水下目标最大速度不小于70 kn,水平测量半径为3 km,姿态角度测量精度可达1°,深度值测量精度为0.5 m。由此可见,该信标可满足大多数水下目标高速运动状态下的航行参数测量要求。
3 实验仿真分析
针对本文设计的遥测信标进行仿真分析。具体仿真参数为:CW 脉冲信号宽度为 5 ms,f0=75 kHz;HFM 信号调制宽度为 ± 3 .5 kHz,f0=75 kHz;T=2 s,t=40.96~81.92 ms(如图4 所示)。
3.1 信标信号的可识别性仿真
该信标波形结构内共包含三种脉冲信号,即CW、+HFM、−HFM,为了防止在接收端产生混淆,需要各种信号相互之间具有较高的独立识别性。将三种脉冲信号进行相关分析,归一化相关图如图5所示。每种信号除自身相关峰明显外,与其他信号相关特性均不明显,也就是说该信标结构内的信号具有很好的独立识别性,不存在识别模糊的问题。
3.2 多普勒效应仿真

图5 信标波形内信号相关示意图Fig.5 Normalized correlation function of the beacon signal
多普勒效应包括多普勒扩展和多普勒频移。由于水声信道的随机、时变特性引起信号的多普勒扩展,在一般情况下约为0.1~0.7 Hz[5],对水声遥测影响不大,这里不予考虑,而多普勒频移则是本文考虑的主要因素。
通常情况下,对于 LFM 信号采用中心频率估计、相关样本修正的方式进行多普勒频偏修正,可满足一般的水声定位需求。但多普勒频偏是随着频率的变化而非线性变化的,不能简单地采用固定频偏进行补偿。另外,当水下目标速度较快时,按照常规方法,利用已知的 LFM 同步信号样本对接收到的信号进行拷贝相关处理时,将会出现相关峰值下降、相关峰分裂等现象,最终降低了时延值测量的精度,甚至降低整个遥测系统精度。
以线性插值法[6]进行多普勒信号的模拟仿真,假设接收到的信号为x。分别将LFM和HFM信号进行中心频率偏移的修正,将修正后的数据和x进行相关,从而获得两种信号在不同速度下的时延值偏移量,结果如图6所示。

图6 多普勒频偏仿真比较图Fig.6 Doppler shift simulation chart
从图6中可以看出,在同样的速度下,HFM信号的相关偏移量均小于 LFM 的相关偏移量,甚至在较大的相对速度下,HFM信号均能保持较高的时延值估计精度。这里为了实验方便,该项仿真没有考虑多途反射与叠加影响,在实际水声信道环境下,其整体估计误差将会增大,但整体规律相同。
4 湖上试验
在某湖水域进行试验,针对该种遥测信号波形的性能进行动态测试。在船只上安装发射声源,利用固定布放在水底的水声基阵(接收端)进行信号接收,除验证其遥测功能外,主要考察高速情况下的该声信标信号存在多普勒偏移时,对水下目标的航行参数遥测所带来的影响。
装载发射声源船速约 8~10 kn,声源距离水下基阵约为750 m,其HFM的信号频谱及相关性如图7所示。实际HFM信号的长度为5 ms,经过水声多途传播后,扩展为7 ms左右,并存在多途信号相互叠加造成的幅度变化。从图7中可以看出,即使在多途干扰及水面反射叠加的复杂水声环境下,依然具有良好的识别特性。
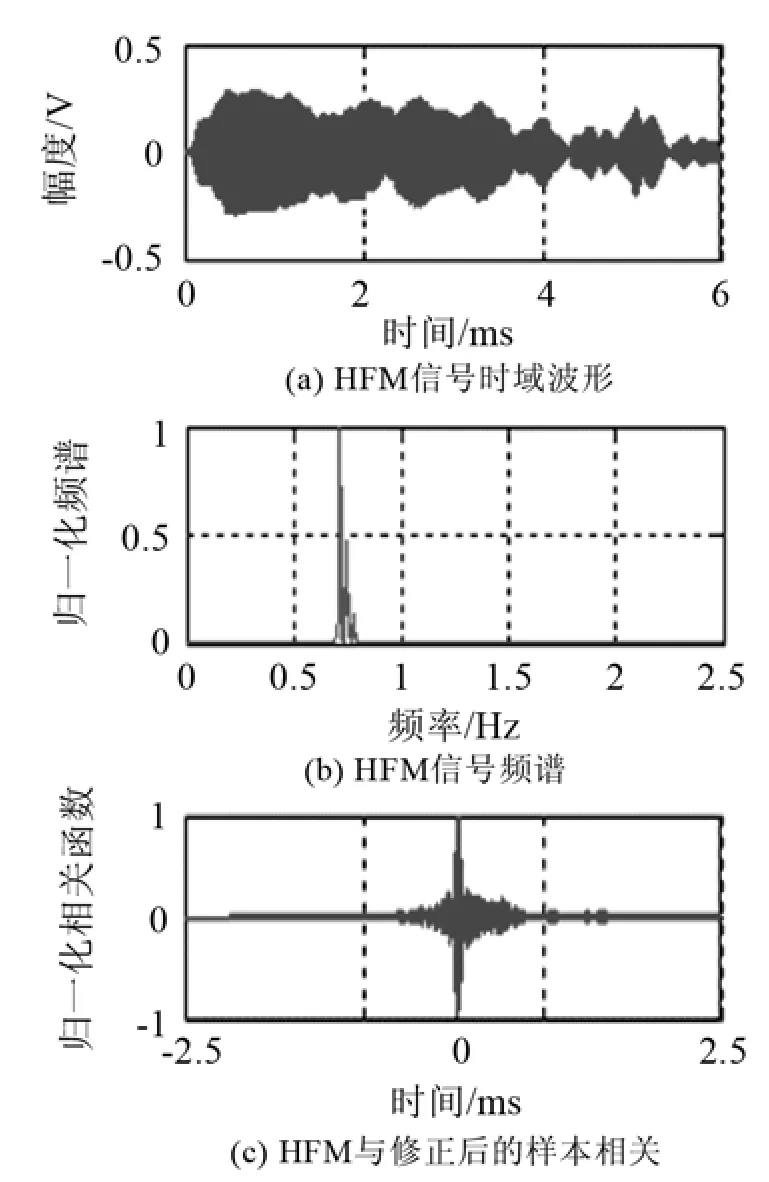
图7 HFM信号经过水声信道后的波形、频谱和相关函数Fig.7 Waveform, spectrum and correlation function of the HFM signal after passing through the underwater acoustic channel
同上,当速度为8~10 kn,距离为800 m时,其 LFM 信号经过水声信道后的信号频谱及相关性如图8所示。
对比图7、图8可以看出,其LFM信号在时域上接收端存在较大的幅度变化(主要由于多普勒效应及多途叠加造成),以至于频域上相关峰出现分叉,降低了测量精度。

图8 LFM信号经过水声信道后的信号波形、频谱和相关函数Fig.8 Waveform, spectrum and correlation function of the LFM signal after passing through the underwater acoustic channel
装载发射声源的试验船只以8~10 kn左右的速度,在100~2300 m的范围内周期发射信标信号,接收端进行相应处理后获得其遥测的误码率如图9所示。图9所示的误码率是指在实际动态试验中,接收端不能正确解算、错误解算及未能接收到的数据,均认为是误码数据。也就是说这里的误码包含了水声遥测过程中所有的错误信息,比如由于声线弯曲在某些区域带来的信噪比急速下降,声信号的反相位叠加等特殊情况,因此,实际动态试验获得的误码率较高。
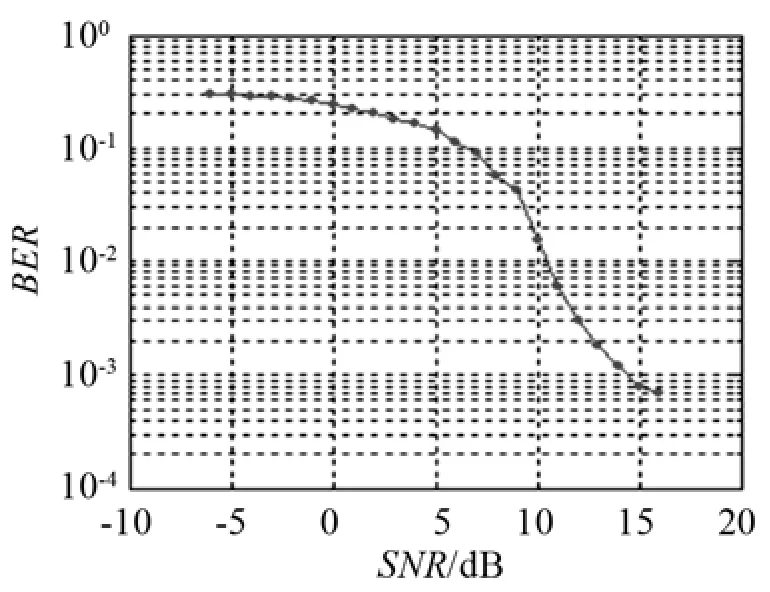
图9 运动状态下的实测误码率Fig.9 The measured bit error rate under the state of motion
由于水声信道的多途效应影响,水声信号与修正后样本的相关峰会出现多个峰值,这里采用加窗及线性插值再次相关的方法[7]获取精确时延值。
5 结 论
经过仿真及湖上试验可以看出,HFM 信号与LFM信号相比,具有更高的多普勒容限,采用HFM信号与单频信号相组合的方式,实现水下目标的航行参数遥测,可以有效校正多普勒频偏的影响,遥测性能稳健,特别适用于水下高速、高机动目标的水声遥测、水声通信等。
参考文献
[1] 田坦, 刘国枝, 孙大军. 声纳技术[M]. 哈尔滨: 哈尔滨工程大学出版社, 2000.TIAN Tan, LIU Guozhi, SUN Dajun. Sonar technology[M]. Harbin: Harbin Engineering University press,2000.
[2] Busnel R G, Fish J F. Animal sonar system[M]. USA: Plenum Press, 1980.
[3] 杨长生, 杜金香, 马艳. 一种宽带仿生信号的小波变换域分析[J].声学技术, 2007, 26(4): 105-109.YANG Changsheng, DU Jinxiang, MA Yan. Analysis of a wideband bionic signal in wavelet transform domain[J]. Technical Acoustics, 2007, 26(4): 105-109.
[4] 李志舜. 鱼雷自导信号与信息处理[M]. 西安: 西北工业大学出版社, 2003, 10.LI Zhishun. Signal and information processing homing torpedo[M]. Xi’an: Northwestern Polytechnical University, 2003, 10.
[5] 惠俊英. 水下声信道[M]. 北京: 国防工业出版社, 1991.HUI Junying. Underwater acoustic channel[M]. Beijing: National Defence Industry Press, 1991.
[6] 林伟. 远程水声通信技术的研究[D]. 西安: 西北工业大学硕士学位论文, 2005.LIN Wei. Study on long-range acoustic communication technology[D]. Xi’an: Master's degree thesis of Northwestern Polytechnical University, 2005.
[7] 刘松海, 冼观福, 廖述常. 同步信标在水下机动小目标轨迹测量中的高精度时延估计方法[J]. 声学技术, 2008, 27(26): 903-906.LIU Songhai, XIAN Guanfu, LIAO Shuchang. A method of high precision time delay estimation in underwater moving mini-tracking with synchronous beacon[J]. Technical Acoustics,2008, 27(26): 903-906.