基于模糊神经网络静止无功补偿装置模型的仿真分析
2014-05-16丁光彬朱宏鹏杨泽明苏金彬
丁光彬,朱宏鹏,杨泽明,苏金彬
(1.河北工程大学水电学院,河北 邯郸 056021;2.天津水利电力机电研究所,天津 蓟县 301900;3.福建省龙岩市计量所,福建 龙岩 364400)
基于模糊神经网络静止无功补偿装置模型的仿真分析
丁光彬1,朱宏鹏1,杨泽明2,苏金彬3
(1.河北工程大学水电学院,河北 邯郸 056021;2.天津水利电力机电研究所,天津 蓟县 301900;3.福建省龙岩市计量所,福建 龙岩 364400)
电力行业的迅速发展使通过无功补偿来降低输电线电能损耗变得极为重要。我国现有大部分电气设备负荷无功波动很大,严重影响系统功率因数,故对现有的静止无功补偿装置(SVC)的工作特性,如实时性和稳定性等有了更高要求。本文从无功补偿入手,通过对SVC工作特性的分析,利用MATLAB设计了基于自适应模糊神经网络(ANFIS)的控制技术,系统仿真结果证明ANFIS控制算法比利用PI控制算法更加有优势,提高了静止无功补偿装置所要求的实时性,即进一步提高了无功控制的速度和稳定性。
电能损耗;模糊神经网络;静止无功补偿
1 引言
电力工业是我国国民经济重要的组成部分,而大部分电气设备产生的大量的谐波和间谐波[1-3]严重影响了系统的功率因数和电能质量。要保障具有良好的电能质量,无功功率就务必保持平衡,通过无功补偿装置调节电网的无功,可以提高电力系统的电能输送、改善输电线路的运行质量。目前静止无功补偿装置(SVC)得到了重要发展并逐步完善,被大量应用于降低输电线路线损和远距离送电的无功就地平衡,同时普遍应用于电力企业和用户的无功补偿。
当前,现有无功控制装置主要有几方面不足∶容易出现投切振荡现象,投切策略不合理,结构形式不合理以及补偿不连续、滞后等,由于工业现代化发展对电网质量要求的大大提高,无功补偿装置的实时性和稳定性更加需要完善和提高。
本文根据静止无功补偿装置工作特性,应用模糊神经网络对SVC模型进行搭建,相比较传统的PI控制技术,采用MATLAB设计基于ANFIS的控制技术,利用系统仿真结果分析,得知ANFIS控制算法比利用PI控制算法更加有优势,并且对于静止无功补偿装置所要求的实时性和稳定性,更加有效。
2 SVC的ANFIS模型设计
本文利用在MATLAB/Simulink模糊逻辑工具箱(Fuzzy Logic Toolbox)中集成的基于Takagi-Sugeno型的自适应神经模糊推理系统模块,搭建SVC的模糊神经网络模型。
2.1 获取数据样本
SVC的核心部分就是控制系统设计,而传统的采用PID、PI、PD等传递函数的算法固有缺点之一就是要采用硬件进行大量的计算,从而浪费了时间,降低了实时性,不能很好的跟踪补偿,有较长的延迟。根据文献[6,9]可知,基于PI传递函数的算法优于PD、PID传递函数的算法,故本文先利用PI算法,根据文献中的传递函数,利用MATLAB/Simulink进行建模、仿真,见图1所示。
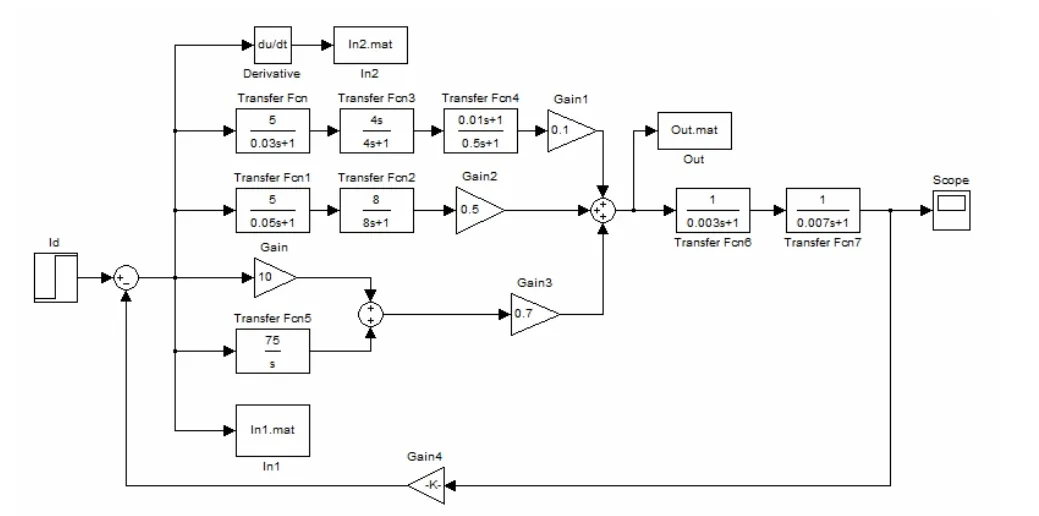
图1 PI控制原理图
利用图1中的PI控制系统进行仿真,仿真时间为30s,获得2859组输入输出数据样本(In1、In2、Out)。设置好PI控制系统的各项参数,并进行仿真运行后,将In1、In2和PI控制器输出Out及时间序列存入文件 In1.mat、In2.mat和 Out.mat。
2.2 数据筛选并模型初始化
在Matlab中,利用load命令将这三个输出文件导入WorkSpace,然后将其间隔地分为两组,一组为训练数据,另一组为校验数据,这两组数据均为归一化数据。通过对数据的筛选、分组等处理,转载进WorkSpace后,最终使得图形化的ANFIS模块自动生成初始化的模糊逻辑系统。
2.3 模糊训练
本次模型采用hybrid(缺省)混合法。误差阈值(Error Tolerance)是用来作为停止训练的判断准则,假设为0。Epochs项是设定最大训练次数,综合考虑计算量和误差范围,设定最大训练次数为60。
图2是训练误差变化曲线。从图2中可以看到训练数据误差呈一直减小的趋势,减小到一定程度(40,1.5)时,曲线斜率减小,表明减小趋势变缓。这表明误差率一直逐渐减小,越来越接近现实的控制系统状态。而且训练数据和核对数据的重合度是相当高的,反映了训练的结果是可靠的。图2中“◆”曲线代表核对数据误差,“*”曲线代表训练数据误差。
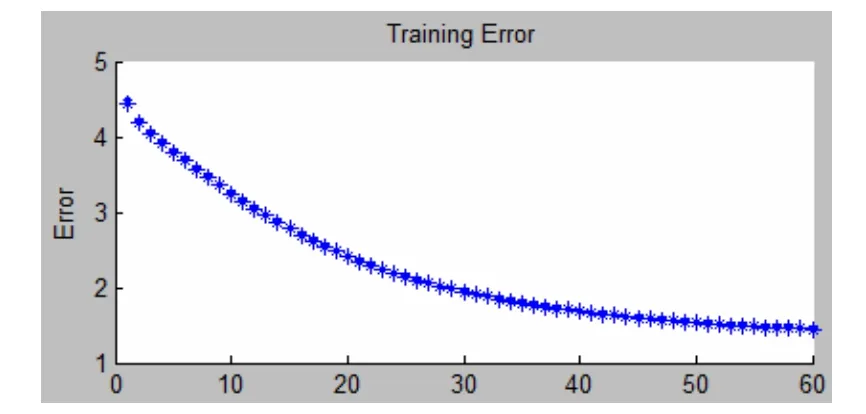
图2 训练误差变化曲线
图3是训练数据与训练结果对比图,图中“○”代表训练数据曲线,“*”代表训练结果曲线。从图3中可以看出,训练数据与训练结果达到理想的匹配,其平均误差约为8.7%。
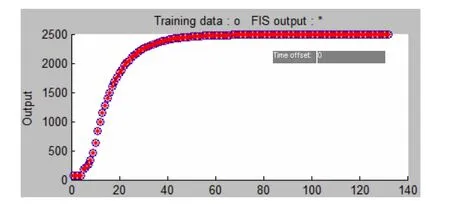
图3 训练数据与训练结果对比
图4是核对数据与训练结果对比图。从图4中可以看出,核对数据与训练结果达到了理想的匹配程度,其平均误差约为5.2%。
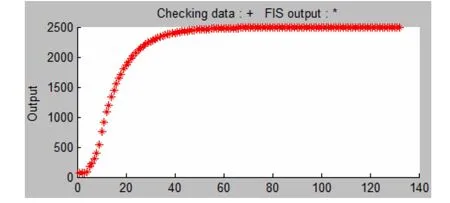
图4 核对数据与训练结果对比
根据上述步骤,从提取数据到模糊系统结构的建立,最后可以得到模糊控制系统在该PI传递函数下的输入——输出关系的一个曲面图,如图5所示。
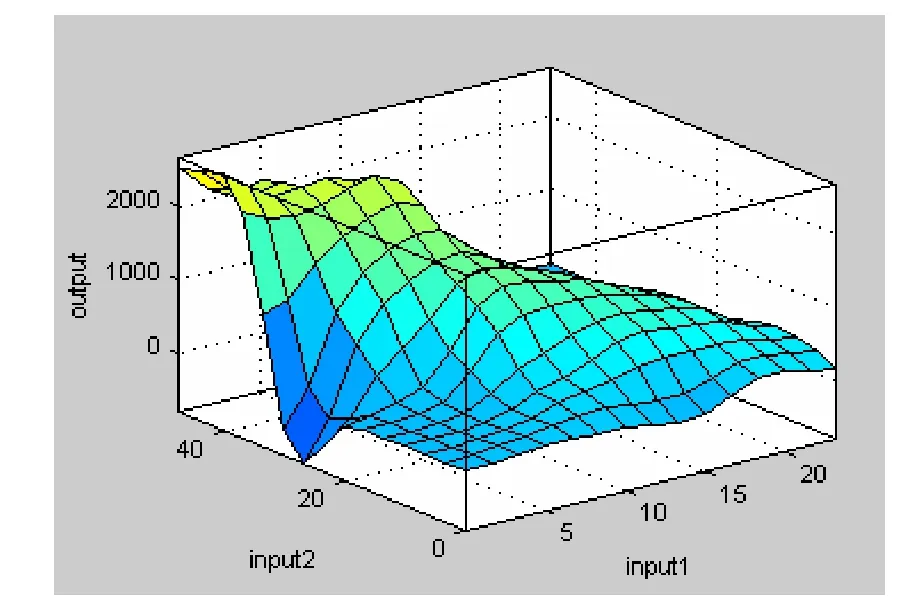
图5 模型的输入-输出关系
2.4 系统仿真结果分析
首先用PI控制算法进行仿真,得到的仿真波形如图6。
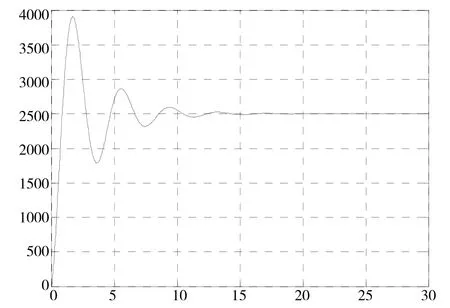
图6 PI控制模型仿真波形
从图6中可以看出,PI控制算法具有较大的超调量,然后系统输出逐步振荡稳定,直到18s左右,系统达到了一个稳定值2500。
然后用ANFIS模型替代PI控制算法,利用输入信号和输入信号的微分作为Fuzzy Logic Controller的输入信号,建立ANFIS仿真模型,如图7所示。根据这个仿真模型,设置好各项参数后进行仿真,得到在ANFIS模糊控制算法下的仿真波形如图8。
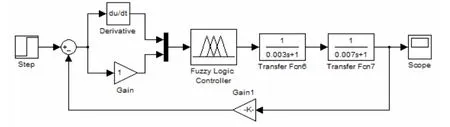
图7 ANFIS仿真模型
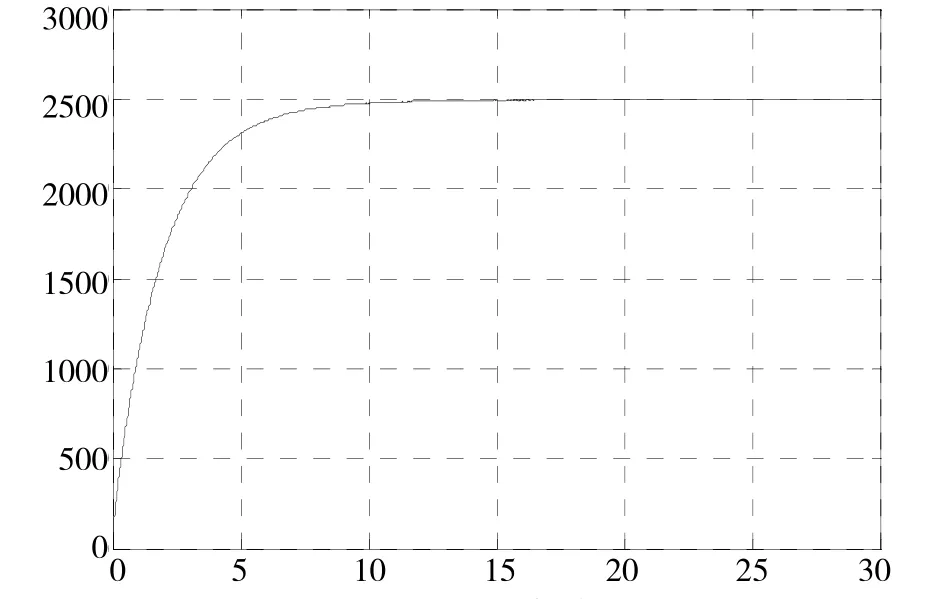
图8 控制模型仿真波形
从图8中可以看出,ANFIS控制算法是没有超调量的,当系统中有输入(检测到的电压值与给定值之间有偏差)时,信号输出稳步增加,系统反应是很快的,没有延迟的;随着时间的增加,输出不断的增大,直到12s左右,系统达到了稳定值2500。
对比图6和图8,我们可以得出这样的结论∶利用ANFIS控制算法比利用PI控制算法更加有优势,具有更好的实时性,同时表明了上述建模的有效性。在本套SVC装置的控制系统中,将利用ANFIS来构建控制器。
4 结论及展望
根据MATLAB软件进行ANFIS控制系统的设计原理和步骤∶利用MATLAB/Simulink进行SVC数学建模,并从PI模型中获取数据样本,然后利用MATLAB将导出的数据进行数学处理,最终将其导入MATLAB的图形化工具anfisedit中进行数据模糊训练,从而获得SVC基于anfis的控制模型。通过ANFIS建模,为静止无功补偿装置控制系统的研制提供了新的控制算法,进一步提高了控制系统的有效性和实时性。
[1]A.R.Boynuegri,B.Vural,A.Tascikaraoglu,M.Uzunoglu,R.Yumurtac.Voltage regulation capability of a prototype Static VAr Compensator for wind applications[J].Applied Energy,2012,93:422-431.
[2]S.CALDERON-FERNANDEZ,M.HERNANDEZ-ANGELES,J.L.GUARDADO,and V.VENEGAS-REBOLLAR.A Control System for Static VAr Compensator Based on a Digitally Controlled Oscillator[J].Electric Power Components and Systems,2012.40:439-452.
[3]王兆安,杨 军,刘进军,等.谐波抑制和无功功率补偿[M].北京:机械工业出版社,2005.
[4]施文冲.现代电力无功控制技术与设备[M].北京:中国电力出版社,2010.
[5]于 群,曹 娜.MATLAB/Simulink电力系统建模与仿真[M].北京:机械工业工业出版社,2011.
[6]张 皎,舞守远,赵 刚,等.输电系统静止无功补偿器的调节方法:中国,1766774[P].2005-09-13.
[7]吴晓莉,林哲辉,等.MATLAB辅助模糊系统设计[M].西安:西安电子科技大学出版社,2002.
[8]朱文俊,王红斌,李峰.静止无功补偿器电压调节器仿真与实验研究[J].现代电子技术,2012,35(14).
[9]祎郑群.基于瞬时无功功率理论的SVC系统研究与Matlab 仿真[J].电气技术,2010(4):20-24.
[10]戴元海.基于模糊-PI控制的静止无功补偿器设计[D].长沙:湖南大学,2009.
TM743
A
1672-5387(2014)02-0018-03
2014-02-26
丁光彬(1964-),男,教授,研究方向∶水利水电工程智能信息处理。