无人机和无人驾驶汽车何时普及?
2014-05-14


最近,亚马逊和DHL都展示了他们用于递送包裹的无人驾驶飞行器,但我们估计还得需要一段时间才能看出这是真枪实战还是市场宣传的噱头。不过其他的全自动无人驾驶飞机和无人驾驶汽车早就在一些试点项目中投入使用了,然而它们还需要克服一些技术难点,需要得到法律的认可,真正证明他们的益处,然后才能真正普及开来。
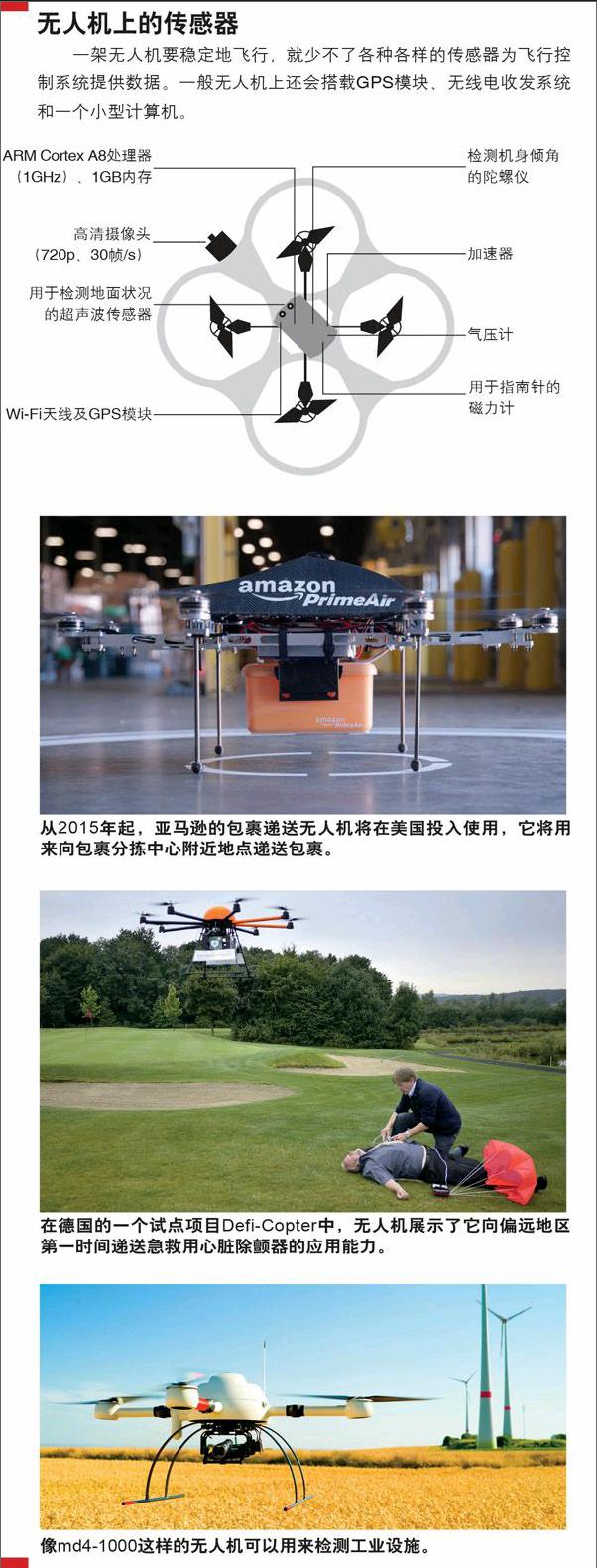
现在货运无人机可能还不适合大面积部署,但在一些特殊情况下,无人机还是展示出了很大的优势,例如迅速递送医疗用品。德国的Defi-Copter项目正尝试通过自动控制的无人机向偏远地区第一时间递送用于急救的心脏除颤器,一架无人机的服务半径可以达到10km,到达目的地后无人机将带着降落伞的心脏除颤器抛下。无论是像Defi-Copter所用无人机的开发公司Height-Tech、Aibotix和Microdrones这些德国公司,还是像Linkall这样的国内创业公司,都早在几年前就开始进行无人机研发了。无人机在快递以外的领域也更早地投入了应用,例如航拍以及检测风力发电机、桥梁或者输电线缆,甚至在大型活动中对人群进行监控。我们可以用300欧元就能从Parrot公司买到玩具无人机,或者也可以像DHL一样花40 000欧元从Microdrones公司买一架md4-1000。专业无人机的高价格并非因为他们的飞行组件,而是由一些附加设备导致的,例如Microdrones md4-1000上通常加装的设备,除了摄像头以外,还包括热成像镜头和气体检测组件。除了这些附加设备之外,各种无人机上的飞行组件并无太大区别,它们大都是由螺旋桨提供动力,并由一些传感器协助控制,例如检测无人机方向的陀螺仪和检查与周围障碍物距离的超声波传感器。这些传感器收集的信息会交由机上的小型电脑进行处理,并对飞行做出控制。Parrot无人机上就搭载了1GHz ARM Cortex A8处理器和1GB的内存。
无人机的控制方式基本上分为手动遥控和软件自动控制两种。Microdrones的无人机会根据Google的卫星地图或者无人机自身航拍的图片来决定飞行线路。在POI-Orbit模块的帮助下,它也可以自动围绕某个物体盘旋,例如在风力发电机检测中,无人机就可以环绕其中一个发电机拍下多个角度的照片。
美国交通部发言人表示,即使无人机能够自动驾驶,但仍然需要将使用范围限定在用户的视线范围之内,以防发生事故。另外,无人机的飞行高度不得超过100m,无人机也不得进入私人领地。在这些规定范围内,私人可以自由使用无人机,而商业使用则需要各州航空管理局的批准。除了这些政策上的限制之外,快递无人机还要解决一些应用上的问题,例如,收件人是否需要有特殊的无人机降落区?怎样防止对无人机的攻击以及对货物的偷盗?亚马逊和DHL都没有给出答案,他们的快递无人机现在也还只是一个技术试验而已。
雷达、摄像头操控汽车
自动驾驶无人机要避免被风卷走或者撞到树上已经是一项技术活儿了,但这跟全自动无人驾驶汽车比起来还是小巫见大巫。无人驾驶汽车所处的环境要复杂得多,有狭窄的街道、交通规则、交通信号灯和标识,还有一些非理性的行为和无法预测的生物。所以自动无人驾驶汽车的普及就更像科幻小说里面的场景了。如果全部交通都自动化,那么在理想状态下,就再也不会出现堵车、交通事故和停车等难题,而且将会大大减轻交通造成的环境压力,而人们的出行也将会更廉价、更便捷。
但这个设想离现实还有很长的一段距离,它所需的人工智能方面的提升并非可以一蹴而就的。几十年前我们就开始朝着这个目标努力,80年代出现的防抱死系统(ABS)和牵引控制就是电子硬件对油门和刹车进行辅助操作的例子。后来还有车道偏离预警系统和倒车雷达,这些技术会在汽车偏离车道或者撞到障碍物之前发出声音进行提醒。
几乎所有的汽车厂商都在开发新技术,并对这些科技进行整合。宝马和奥迪的某些车型能够在堵车时自动驾驶,某些沃尔沃车型可以自动停车,只不过需要车主拿着智能手机站在停车位前。在新加坡,一辆自动无人驾驶的公共汽车已经可以搭载8人以20km的时速行驶在1km长的固定路程上。这辆Induct Navia采用了光学雷达(LiDAR)进行导航,Google自动无人驾驶汽车也采用了相同的技术,福特近期也在开始对这项技术进行试验和检测。
光学雷达,顾名思义,就是以光束作为脉冲信号的雷达。Google自动无人驾驶汽车上的光学雷达同时发出64道激光光束,每秒进行上百万次的测距工作,并以此绘制周围环境的3D模型。由光学雷达得出的模型,再加上普通雷达、普通摄像头和GPS系统,这些都是汽车自动驾驶行为的判断依据。Google从2009年起便开始了自动无人驾驶汽车的测试,到目前为止,Google自动无人驾驶汽车已经安全行驶了超过500 000km,并保持零事故的记录。Google的目标是能够在2018年推出商用自动无人驾驶汽车,Uber这家美国的出租车和豪华轿车出租服务创业公司,已经声明计划将从Google购买2 500辆自动无人驾驶汽车了。
奔驰也对外展示了他们的自动无人驾驶汽车,配备了Intelligent Drive系统的奔驰S500在无人驾驶的情况下在从曼海姆到普福尔茨海姆的公路上行驶了100km。
Intelligent Drive系统综合了奔驰已经推出的Distronic Plus巡航定速系统和方向盘控制辅助系统以及已经在E系和S系配置的Stop & Go Pilot交通堵塞自动驾驶功能。对周围环境的分析由后视镜前方的3D摄像头、两个普通摄像头、几个雷达测距设备、超声波检测器和红外线热感应摄像头合作完成,他们为行驶中的汽车提供每小时300GB/h的环境数据。汽车上的计算机根据这些数据做出是否闪避障碍物或者是否通过路口这样的决定。现在奔驰自动无人驾驶汽车的最高时速已经达到了100km。车载计算机向一个特殊绘制的地图进行每秒10次的数据同步,这个地图的精度达到了100mm级别,并且记录了所有交通信号灯的规律以及路上行人穿越道路的数据,这个地图现在还只针对测试道路的区域,毕竟目前的卫星地图对于这种要求来说还是太不精确了。这样的地图是奔驰的自动驾驶技术投入使用的关键前提,但它也需要频繁地进行更新来反映道路情况的变化,所以它也是自动无人驾驶汽车真正商用的一大瓶颈。
自动驾驶技术面对的另一个难题是交通信号灯的识别问题。在这方面,设备面对着和人类驾驶员面对的同样问题:信号灯经常以一个难以看见的角度出现,或者处在逆光之中。但识别并非是问题的全部,德国人工智能研究中心附属机器人创新中心的负责人Frank Kirchner教授表示“问题的另一方面是将检测识别出的对象放到环境中去怎么理解”,他的研究方向是为自动控制系统创建用于判断并做出决定的模块。人类可以很容易地将环境中的重要信息及噪音分离开来,然后灵活地进行反应,但这对计算机来说还是很困难的,尤其是面对环境中行为不可预测的行人和其他车辆时。奔驰的Car-to-X通讯系统,即不同车辆之间和车辆与智能基础设施之间进行的通讯,可能是解决这一问题的一种方法。
1968年的相关法律有待修订
Kirchner认为,自动无人驾驶汽车能在5年之后上路,起码会出现在环境更简单的可预测的高速公路上,Kirchner预测的时间和汽车业界同仁的共识并没有太大差别。奔驰也预计他们的自动无人驾驶汽车将在2020年左右商业化。然而在英国伦敦80km外的小城米尔顿凯恩斯,2015年就将启动20辆自动无人驾驶汽车的公共交通实验,如果实验顺利的话,那么到2017年,在米尔顿凯恩斯城道路上运行的公共自动无人驾驶汽车将达到100辆。
然而自动无人驾驶汽车的普及还受一些法律因素的制约。联合国经济及社会理事会于1968年在维也纳举行的道路交通会议上签订的协议第八条规定,驾驶员必须能够在任何时刻控制自己的交通工具(中国并未参与会议或签订条约)。所以像自动车距控制和奔驰的Stop & Go系统这样的辅助系统都必须能够随时被驾驶员关闭。欧盟关于交通工具控制系统的条例直接禁止了不受驾驶员控制的控制系统。无人驾驶汽车的厂商都非常希望这些过去制定的法律条款能够被修订。奔驰预计3、4年之内这些条款的修订工作就会被提上日程。但即使在新条款下,汽车也配备了像飞机一样的记录所有摄像头和传感器数据的黑匣子,然而如果汽车出了事故,面对黑匣子中的数据,我们仍然不能确定到底是汽车厂商还是驾驶员应该对事故负责任。endprint
