一种新的光伏系统MPPT方法
2014-05-12云南大学信息学院尹灼峰蔡光卉余江高洪建夏锴
云南大学信息学院 ■ 尹灼峰 蔡光卉 余江 高洪建 夏锴
武警重庆市总队 ■ 张齐龙
0 引言
在资源日趋紧张的今天,石油、煤炭等常规能源毕竟数量有限,且在开采和使用中会对环境造成影响,而太阳能光伏发电因为环保、低碳等优势受到人们的青睐[1]。太阳能发电的工具是光伏电池,光伏电池具有非线性特征,且其输出受光照强度、环境温度的影响较大,为了提高发电效率,必须采用的技术是最大功率点跟踪MPPT(Maximum Power Point Tacking)。目前常用的MPPT算法有:恒定电压法、扰动观察法和增量电导法等,然而这些方法都各有缺陷。面对这种情况,有人提出很多改进策略,不过这些新方法越改进越复杂,控制起来难度越高。本文试图提出一种方法相对简单的MPPT算法。
1 光伏电池的模型
根据文献[2],可将光伏电池阵列等效为如图1所示的电路图。
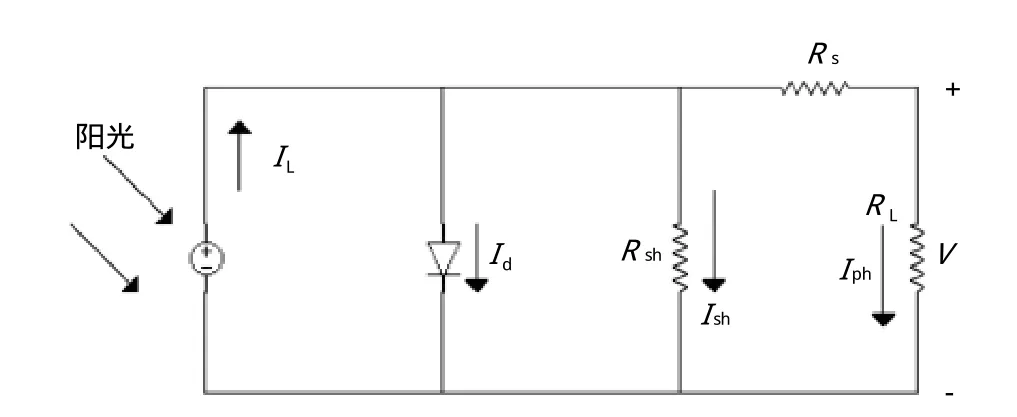
图1 光伏电池阵列等效电路图
根据图1的电路模型,可得到:
所以,输出端电流为:

式中:IL为光生电流源,其值正比于光伏阵列的表面积、光照强度等;I0为光伏电池内部等效二极管的p-n结反向饱和电流,它与材料特性有关;A为二极管的品质因子;q为电子电荷1.6×10-19C ;k为玻尔兹曼常数1.38×10-23J/K;T为绝对温度,T=t+273 K;Rs为串联电阻,一般小于1 Ω,主要由电池的表面电阻、导体电阻、电极与硅表面接触电阻等组成;Rsh为并联电阻,是旁路电阻,阻值巨大,可达几千Ω。
当视Rs为无穷小、Rsh为无穷大,则式(2)简化为:

由式(3)知,由输出电压V可计算得到输出电流Iph,进而得到输出功率P=VIph。
综上所述,为了充分使用太阳能,就要使光伏电池的输出功率P尽可能大,而P值直接取决于V,即通过调节V到恰当的值,可获得最大的功率输出,这就是光伏系统的最大功率点跟踪(MPPT)技术。
2 目前常见的MPPT方法
2.1 恒定电压法
当温度一定时,光伏电池输出特性曲线上最大功率点电压基本固定在电压值附近小范围内,因此根据实际系统设定一个恒定的运行电压,让系统始终保持在某一个设定电压下工作,从而尽可能地输出最大功率。该方法将MPPT转化为稳压控制,设计简单,成本较低,但准确性不高。
2.2 扰动观察法
在光伏电池工作的外部环境变化不大时,可假设其P-U曲线是一个单峰值的曲线先让光伏阵列工作在某一参考电压,每隔一段时间对系统给予扰动,即增加或减小一个电压值dV,然后与扰动前的功率值进行比较,从而判断下一次扰动是增加还是减小。
这种方式的缺点是:扰动步长dV难以确定,dV过小会延长跟踪时间,而过大则会降低跟踪的精确度,很难在快速与精确之间取得平衡;且在稳态时,盲目给予扰动会造成功率的额外损失;当光照强度突变时,产生误判的可能性也很大。
对此,有人提出了变步长的扰动观察法[3]:当扰动dV后,dP变小时减小下一次扰动的步长dV值;相反,则增大下一次扰动的步长dV值。这是目前常用方法之一,其使用的局限性在于方法假定了环境温度和光照情况等外部条件未发生变化。
2.3 电导增量法
由光伏电池的P-V单峰值曲线可知,在最大功率值Pmax处必有dP/dV=0,当dP/dV>0时Pmax在其右侧,说明参考电压应继续向增大的方向变化;当dP/dV<0时Pmax在其左侧,说明参考电压应该向减小的方向变化。为了提高精确度以及让光伏阵列更加稳定于Pmax附近,有人提出了变步长的电导增量法[4]:当参考电压接近Pmax时减小步长,当参考电压远离Pmax时加大步长。
2.4 其他常见MPPT方法:
因为光伏电池的数学模型很难得到精确描述,它与光伏板材料有关,与工作时的环境温度有关,与工作时的光照强度及光照角度等都有关系,而这些外部因素在实际中又时刻变化,所以,严格地说,光伏电池数学模型也在时刻变化,这样就更不容易被描述了。因为模糊控制、神经网络等方法不依赖被控对象的精确模型,因此也常被用于光伏系统MPPT。
这些新方法都比传统方法先进,不过实现起来并不那么容易,且成本控制方面不见得有太大优势。本文试图提出一种方法简单、成本便宜的新的MPPT方法。
3 本文提出的MPPT方法
3.1 基本思想
光伏电池阵列的P-U关系曲线如图2所示,在第一阶段,以一个较大电压间隔△D把U值可能的取值范围分为很多段,并分别得到对应段上的P值,然后比较各P值大小,找到P值最大的点(如图2中的P1点);只要△D选取合适,最大功率点Pmax肯定就在P1点附近;第二阶段,再以P1点为中心,△D为半径,P2、P3点为界组成的区域内以较小的电压间隔△d细分为更小的小段,然后同理得到各小段上的P值并比较得出最大值,此时的最大值点(图2中Pmax点)已经是(或者已经非常接近于)真正的最大功率值Pmax了。
3.2 MPPT方法的优点
1) 方法简单且成本较低。主要需要做的就是各分段上的电压采集,再通过式(2)计算得到相应的电流值,从而得到各点处的输出功率P。该方法不需要微分器、积分器等复杂设备,在成本控制上也有优势。

2) 值得一提的是,传统方法基本都假设了P-U曲线是光滑的单峰曲线,而事实上光伏电池板会因为所处环境的变化而时刻发生变化,从而造成P-U曲线并非如此光滑,也并非真正的单峰。如光伏板上有阴影出现时,P-U曲线会形成明显的局部峰值,成为多峰状。如图3所示,P0点处的峰值并非真正的Pmax值,传统方法很有可能会陷入该局部峰值,而本文的方法却不会。

图3 当P-U曲线出现多峰值时
3.3 仿真
我们在标准测试条件下(温度25 ℃,光照1 000 W/m2),采用南京研旭自动化设备有限公司提供的光伏板进行测试,利用式(2)得到光伏电池板的P-U曲线,如图4所示的单峰曲线。
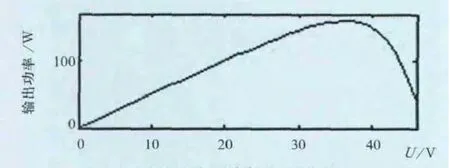
图4 第一阶段P-U曲线

图5 第一阶段抽样(ΔD)
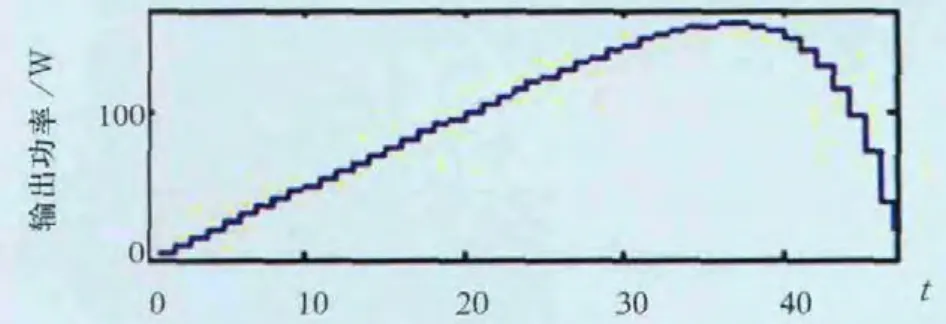
图6 第一阶段功率输出
第一阶段:先对光伏板可能的输出电压范围U(0~48 V)以间隔△D(仿真中△D=1V,共抽取49点)进行分区抽样(图5),并得到对应的功率输出(图6)。经第一阶段的抽样和比较,得知在U=37 V处输出功率最大,Pmax1=158.560 6 W。
第二阶段,将目标集中到U=37 V点附近,半径为△D的区域内(如图7所示的区域),并在此区域内以△d(仿真中△d =0.04 V,共抽样51个点)为电压间隔进行分段抽取,如图8所示。在此阶段,由于系统一直在最大功率点附近(图9),整个过程中纵坐标并未有大幅度变化,说明此阶段并未造成太多的功率损失。经第二阶段的抽样和比较,得知在U=36.28 V处输出功率最大,Pmax2=158.589 1 W,该值正是我们要跟踪的最大功率值。
综合以上过程,可得到系统在整个过程的功率输出,如图10所示。当在第一阶段(t=0~47处),要遍历整个电压区域采样会造成一定的功率损失;然而在第二阶段(t=48~99处),系统基本稳定于最大功率值附近,并未造成太大功率损失;第二阶段结束后系统已跟踪到最大功率点,之后趋于稳定。




图10 采用本算法得到的输出功率
4 分析及总结
1) 仿真中第一阶段得到Pmax1=158.560 6 W,该值非常接近于真正的最大值Pmax2(158.589 1 W),所以只要电压间隔△D和△d选取合适,经过两个阶段,该算法能跟踪到最大功率值。当然,如果因为电压间隔选取过大等原因,得到数值不够精确,则可同理进行电压间隔更小的第三阶段的分段。
2)如何更快速地跟踪到最大功率点,减少在寻找过程所造成的功率损失呢?这与采样间隔△D和△d有关。因为第二阶段,系统已工作于很接近最大功率点附近,并未造成太大功率损失,所以主要与△D有关。当△D越大,能更快速地跟踪到最大点,减少功率损失,但也不能过大,因为△D越大,最大功率跟踪的准确性会降低。可见,快速性与准确性之间存在矛盾,需要权衡。
3)实际中,最大功率点往往不是固定在某一点,而是会发生移动,本算法在找到最大功率点后,如何稳定地跟踪到新的最大功率点?本算法在第二阶段找到最大功率点后,系统便工作于该点(如仿真得到U=36.28 V的点),为适应最大功率点发生偏移的情况,可在每隔一个时间间隔△t就在最大功率点为中心,△D为半径的范围内重复第二阶段的电压分段抽取,并跟踪到新的最大功率点。因为重复的是第二阶段,所以并未造成太大功率损失(图10)。当然,如果新得到的值与之前的值相差甚远,则说明发生了突发情况,实际的最大功率点可能已不在第二阶段所抽样的电压范围内,此时可考虑从第一阶段开始再次进行最大功率点跟踪。
[1]韩玉争.光伏发电中MPPT控制方法概述[J]. Silicon Valley,2013, 9: 105.
[2]张欢欢.光伏发电系统最大功率点跟踪的算法研究与系统设计[D]. 上海: 东华大学, 2013.
[3]袁芳. 对改进扰动法实现MPPT最大功率点跟踪的研究[J].科技创新与应用, 2013, 22: 51.
[4]黄勤, 赵靖, 凌睿, 等.基于改进变步长电导增量法的MPPT控制[J]. 计算机工程, 2013, 39(2): 245-249.
