基于PLC和触摸屏的船舶电力推进监控装置设计
2014-05-07李伟翔施伟锋张威徐培杰
李伟翔,施伟锋,张威,徐培杰
基于PLC和触摸屏的船舶电力推进监控装置设计
李伟翔,施伟锋,张威,徐培杰
(上海海事大学 电气自动化系,上海 201306)
为提高船舶电力推进的控制质量与安全可靠性,设计了基于施耐德M340 PLC和XBTGT7340触摸屏的电力推进系统监控装置。装置的硬件方面,以Modbus现场总线技术为基础,运用ATV61变频器实施推进电机控制,运用PM850和ION7650两种电力参数检测仪表实施推进系统监视。装置的软件方面,在完成现场总线通讯、推进系统故障报警编程的基础上,鉴于船舶航行海况等因素对于推进系统安全运行的巨大影响,设计了转速/转矩联合的控制方式和两种控制方式进行无扰动切换的逻辑功能。装置制作完成后进行的推进电机控制实验表明,其功能可以满足船舶电力推进监控的主要要求。
船舶电力推进 监控装置 PLC 触摸屏 人机界面
0 引言
船舶电力推进系统具有操纵灵活、低速性能好、经济性高等优点,因而得到越来越多的应用。电力推进系统的控制对象包括发电机、变压器、变频器、电机等设备[1],非线性元件多,电能质量复杂,不仅要考虑推进电机的起动、调速等控制对电网的影响,而且要根据电网状态及时调整推进电机的控制。此外,随着船舶全网一体化的进程不断发展,各系统之间相互作用,系统功率密度越来越高,要求船舶电力推进监控平台具备功能更强的监控作用,并同时具备电能质量管理、监测报警等功能以提高电力推进稳定性和安全性的要求。本文设计了基于施耐德M340 PLC和XBTGT7340触摸屏的船舶电力推进监控装置。
1 船舶电力推进监控装置硬件结构设计
硬件系统结构基于现场监控层,结合远程监控层两层网络进行设计[2],网络之间有通讯接口连接,如图1所示。
现场监控层:监控部位将实体按钮、旋钮和状态指示灯作为监控指令发送和状态显示元件。通过电力参数测量仪表PM850和ION7650采集推进系统电力数据。通过I/O模块扫描监控指令和推进电机的实时状态,以逻辑量形式显示在现场监控部位,并向变频器发出频率给定信号。
远程监控层:远程监控部位以XBTGT7340触摸屏为主要设备。在触摸屏中设计上位人机界面,实现电力推进的远程监控功能,提高信息集成度和自动化水平。主要功能包括推进电机的远程调速、监控部位的切换、电力推进参数与电机运行状态的集中监视、故障的监测报警与处理及其他安全功能。
通信接口:装置采用分布式现场总线,将电能质量参数的监控功能下放到现场级设备PM850和ION7650,最大限度利用现场信息,增加系统可靠性,降低成本。现场级设备采用RS485串行通信。远程监控设备采用基于TCP/IP的工业以太网通信,以确保高密度数据传输的准确性和实时性。通信接口通过以太网关转换现场级设备的通信协议,并利用交换机建立以太局域网。
2 船舶电力推进监控装置软件设计与编程
2.1 PLC监控程序设计
一般推进系统以转速控制为主,而将转矩控制仅用于对电机的保护。但在船舶起动阶段、吃水较深或遭遇恶劣海况时,需要对转矩进行控制,以获取最大推力或应对频繁并且巨大的负载变化。装置提升了转矩控制的地位,设计了转速/转矩联合闭环控制策略,控制流程如图2所示。轮机长在集控室收到驾驶室的船速传令后,可根据情况选择将船速指令转化为转速信号或转矩信号,通过“转矩分级限制”或“临界转速回避”环节的预处理后,再与各限幅环节进行选小,最后经过PID控制器生成频率信号传给变频器。转速/转矩联合闭环控制策略不仅提高了船舶调速控制的灵活性,也能一定程度上减少强烈负载变化对船舶推进设备的损害,提高电机运行的稳定性与安全性。

图1 船舶电力推进监控装置硬件结构图
PLC程序设计以转速/转矩闭环PID调速程序为核心,设计了转速/转矩控制无扰动切换程序、基于转矩控制的负荷控制程序、推进电机起动程序、监控部位切换程序、故障报警与处理程序等。
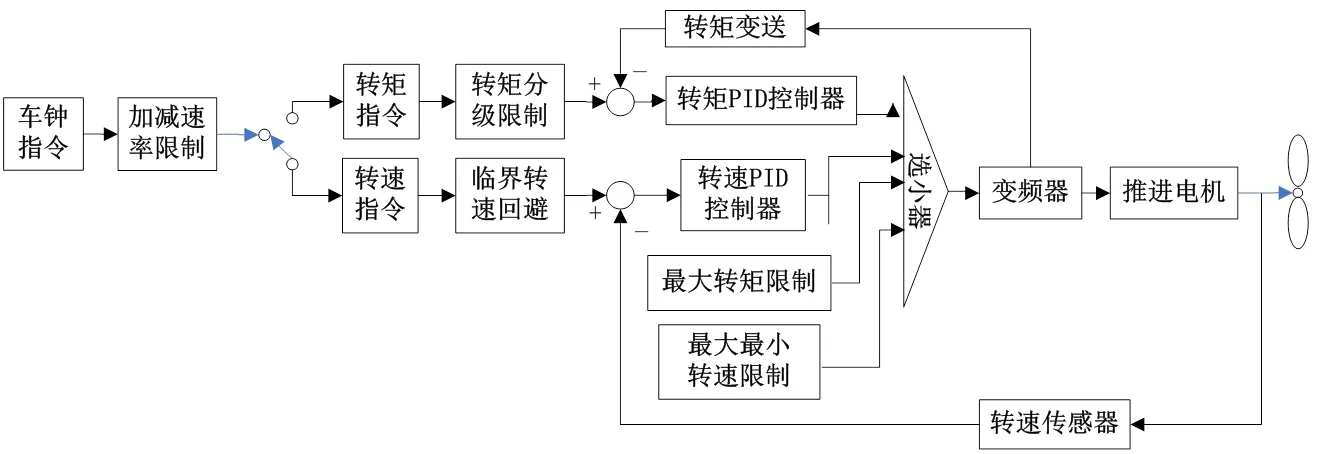
图2 转速/转矩闭环联合控制流程图
2.1.1转速/转矩联合控制程序设计
在电机处于高负荷运行的情况下对转速控制和转矩控制进行直接切换,会导致电流突增,对电网产生扰动并损坏电机。为了实现转速/转矩控制的无扰动切换,装置设计了切换条件以及请求和应答操作流程,如图3所示。驾驶台没有权限对推进电机进行转矩控制,因此转速/转矩控制的切换前提是当前操作权限在本地监控部位。切换操作由轮机长进行,切换时要求调节相应的车钟以免在切换时产生扰动。
2.1.2基于转矩控制的负荷控制程序设计
在恶劣海况下,一般采用负荷控制方法。常用方法是“恶劣海况转速控制”和“定油量模式控制”。文献[3]对两种控制策略进行了详细的介绍。其不足在于,控制程序动作之后无法回归到原来的控制方式或车钟指令,自动化程度不够高。

图3 监控部位切换程序流程

图4 基于转矩控制的负荷控制过程
装置采用了基于转矩控制的负荷控制方法。在转矩控制模式下,当电机跟踪到车令转矩后,系统自动将稳定后的转速保存为参考转速。当转速超限时,自动切断转矩输出,待转速回落至参考转速后将转矩输出恢复至车令转矩。基于转矩控制的负荷控制过程示意图和程序流程图分别如图4和图5所示。该控制策略的优点在于,在每次动作之后电机运行状态都能恢复到之前的操作模式和车钟指令,避免了重复操作,提升了自动化水平,并且转速上限的设定更加灵活,进一步提升了转矩控制的适用性。
2.2 驾驶室监控人机界面软件设计
根据电力推进远程监控的功能要求,在XBTGT7340触摸屏中设计了远程监控人机界面。
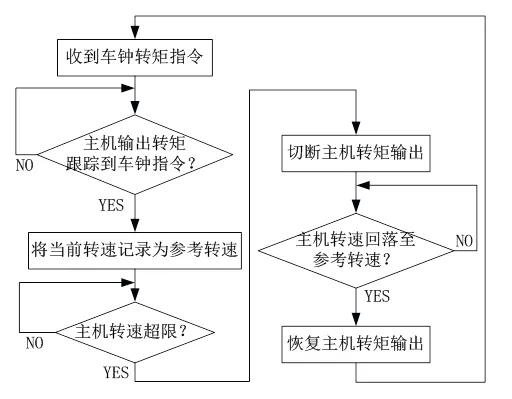
图5 基于转矩控制的负荷控制程序流程
2.2.1驾驶室监控主界面设计
船舶电力推进监控主界面是远程监控最重要的界面,应可以显示推进电机的基本运行参数和报警信息,点击参数后,相关的文字信息、图形仪表等会立刻显现,同时还应该可以通过软键在不同界面之间进行切换和导航[4],并具有车令发讯功能。装置所设计的监控主界面配备遥控模拟车钟来对推进电机进行远程调速,并显示推进电机的转速、转矩、频率和功率等重要运行参数。界面上方的状态栏中可获悉系统当前状态。点击界面下方的软键可进入切换监控部位、限制功能、电能质量和报警等子界面。
2.2.2监控部位切换界面设计
装置的监控部位分为本地监控和远程监控,分别置于集控室和驾驶室中。当监控部位进行切换时,需要在两地进行请求-应答操作,目的是对两地车令和推进电机实际运行状态进行同步性检查,避免切换时产生扰动。装置在触摸屏中设计了位于远程监控部位的监控部位切换界面。在该界面中可获悉当前所处的监控部位,在进行监控部位切换操作时根据切换程序流程显示未满足的切换条件并发出声光信息。该界面还实时显示两地车钟情况,使切换过程更透明,降低错误率。
2.2.3限制功能界面设计
在非紧急情况下,一般要求推进监控系统对推进电机的加减速率、转速等参数进行限制,限制值设为最大值的80%~90%,作用是减小电机在短时间内的大功率输出对电网的扰动以及长时间的高负荷运行对设备的损耗。限制功能在紧急情况下将自动失效,以发挥出推进电机的最大能力进行避险。装置将该功能放在限制功能界面中。该界面显示了所有限制功能,包括加减速率限制、临界转速回避、转矩分级限制、最大/最小转速限制以及最大/最小转矩限制等。当车钟指令超出限定值时,系统将以限定值运行,并且相关的限制功能显示高亮,点击可显示详细信息,并可选择取消该限制功能。在限制功能界面还可以对限制值进行调节并预览限制过程曲线。
2.2.4电力推进电能质量监视界面设计
船舶电力系统作为小容量的独立电网,对电能质量具有较高的要求。电力推进系统的电功率占电网总功率的50%以上[5],且包含变频器等众多大容量的电力电子器件,运行过程中的谐波干扰会产生有功功率和无功功率损耗,导致电压谐振,对船舶电网和主要负载及通信设备造成严重影响和损害[6]。因此,对电力推进系统电能质量的监视至关重要。装置在远程监控部位设计了电能质量监视界面,不仅能显示电压、功率、频率等电力推进系统的常规电力参数,而且能对电压偏差、频率偏差、三相不平衡度、谐波、电压闪变和波动进行实时监测和计算,并在电能质量低下时,为调整电网配电和电机运行方式、隔离对电压扰动及谐波敏感的用电设备或投入谐波抑制设备等操作提供依据。
2.2.5监控延伸报警界面设计
先进完善的延伸报警是实现无人机舱和船舶自动化的关键之一。在无人值班时,必须要将电力推进系统的故障报警信息传送到驾驶室的延伸报警界面中[7]。本装置设计的延伸报警界面,按故障严重程度将报警分为两种:重要报警和次要报警。重要警报是指故障会直接导致电力推进系统无法运行或造成设备损坏,甚至威胁全船安全,包括:推进电机故障自动停车或降速、推进电机起动失败、控制或切换逻辑错误、三相短路和断路等。次要警报是指故障会影响电力推进系统运行效能或导致设备磨损,包括:转速或转矩超限、电压或频率超幅、电能质量异常等。故障发生时,界面将显示故障文本信息和确认操作按钮,并发出声光信号。声光信号将根据故障种类和持续时间进行不同形式的区分。延伸报警界面还具备故障记录功能,显示历史故障的类型、发生的时刻、持续的时间等,便于进行故障分析[8]。
3 监控装置两层网络通信设计
装置是基于施耐德Modbus总线协议的分布式现场总线监控系统。装置通信采用客户端/服务器(Client/Server,C/S)结构,根据具体需求将任务合理分配给客户端和服务器,发挥了客户端的处理能力,降低了系统的通讯开销,减轻了服务器的工作量[9],通信网络结构如图6所示。

图6 Modbus TCP/IP 通信结构
Modbus是一种请求-应答协议[10]。主站通过单播模式对从站进行读写操作。PM850和ION7650作为从站设备,采用基于RS-485串行链路的Modbus通信,通信过程中采用RTU传输方式,差错校验采用循环冗余校验方式(CRC)。M340 PLC通过读从站寄存器的方式获取推进系统的电能质量数据和状态参数。图7所示的M340 PLC功能块语言(FBD)“READ_VAR”将PM850采集并保存在寄存器内的电力参数依次读到PLC的内存中。
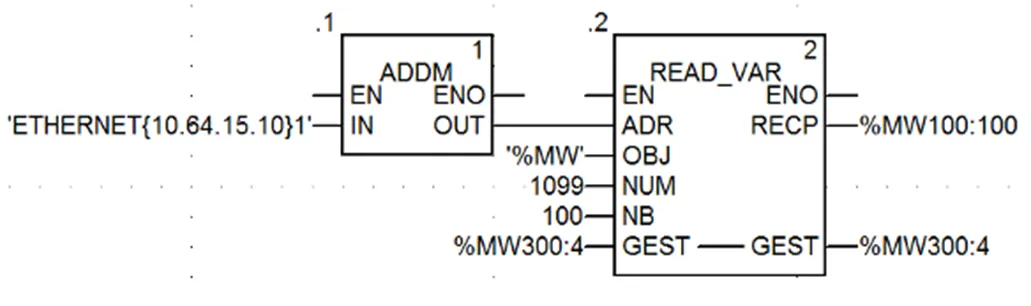
图7 PLC读寄存器
4 结论
船舶电力推进监控装置作为推进控制的关键设备,其研究与应用涉及PLC控制、人机界面设计、现场总线技术和电力参数检测仪表应用等关键技术,装置设计在监视方面实现了船舶电力推进的本地和远程监控、电能质量监视以及故障报警功能,在控制方面实现了转速/转矩闭环联合控制方式,提高了电力推进控制对于不同海况的适应性。实验表明,设计的船舶电力推进监控装置可以满足船舶电力推进变频调速监控的要求,具有一定的实际应用价值。
[1] 陈次祥, 唐石青, 王良秀, 等. 电力推进技术下的船舶电站发展[J]. 舰船科学技术, 2010, (8): 30-32.
[2] 胡红钱, 刘晓勤, 施伟锋. 基于PowerLogic系统构架的船舶自动化电站监控系统[J]. 上海海事大学学报, 2011, 32(3): 20-24.
[3] 林叶锦. 轮机自动化[M], 第1版. 大连: 大连海事大学出版社, 2009: 269.
[4] 贾宝柱, 韩学胜. 轮机自动化基础[M], 第1版. 大连: 大连海事大学出版社, 2011, (3): 181.
[5] 焦东升, 陆冬良, 应俊豪, 等. 基于Profibus的电能质量实时监测系统设计[J]. 电力自动化设备, 2011, 31(5): 117-121.
[6] 范啸平, 韩龙, 邰能灵. 电力推进船舶谐波问题及实例分析[J]. 船舶, 2012, 23(1): 58-64.
[7] 仲伟波, 丁修方. 基于CAN总线的船舶机舱延伸报警系统[J]. 江苏大学学报: 自然科学版, 2012, 33(3): 316-320.
[8] 蒋晓峰, 施伟锋, 刘以建, 等. 基于触摸屏和PLC的船舶电站监控系统设计[J]. 电力自动化设备, 2011, 31(1) : 122-125.
[9] 蔡礼松, 余楚中. 基于CAN的船舶数据监控系统设计[J]. 中国造船, 2013, 54(3): 184-189.
[10] 华镕. 从Modbus到透明就绪——施耐德电气工业网络的协议、设计、安装和应用[M], 第1版. 北京:机械工业出版社, 2009: 25-26.
Design of Shipboard Electrical Propulsion Monitoring Control Device Based on PLC and Touch Screen
Li Weixiang, Shi Weifeng, Zhang Wei, Xu Peijie
(Shanghai Maritime University, Shanghai 201306, China)
TP29
A
1003-4862(2014)12-0023-04
2014-05-21
上海市教委科研创新重点项目(12ZZ155),高等学校博士学科点专项科研基金(20123121110003)
李伟翔(1990-),男,硕士研究生。研究方向:船舶电力推进系统监控。