桥式起重机特点及电气控制
2014-04-25马冠英
马冠英
(广东省特种设备检测研究院佛山检测院,广东佛山 528000)
桥式起重机特点及电气控制
马冠英
(广东省特种设备检测研究院佛山检测院,广东佛山 528000)
起重机是一种用来搬运重物的起重运输机械,起吊高差大,负重运行频繁,危险因素也比较多,容易发生事故。本文主要对桥式起重机的电气控制进行了分析。
桥式起重机 电气系统 故障 安全
1 桥式起重机对电力拖动的要求
由于桥式起重机工作环境比较恶劣,经常处于断续工作状态,拖动电动机经常处于起动、制动、正反转之中,负载很不规律,时重时轻并经常承受过载和机械冲击,因此对起重机的电气传动系统有很高的要求。现在常用的调速方式有绕线式异步电动机转子串电阻调速、定子调压调速和变频调速,为了保证起重机的生产效率和可靠性,对其电力拖动和自动控制等方面都提出了很高要求,这些要求集中反映在提升机构的控制上,而对大车及小车运行机构的要求就相对低一些,主要是保证有一定的调速范围和适当的保护。起重机对提升机构电力拖动与自动控制的主要求是:空钩能快速升降,以减少辅助工作时间,提高效率。轻载的提升速度应大于额定负载的提升速度;具有一定的调速范围,对于普通起重机调速范围一般为3:1,而要求高的地方则应达到5:1~10:1;在提升之初或重物接近预定位置附近时,都需要低速运行。因此,升降控制应将速度分为几挡,以便灵活操作;提升第一挡,为避免过大的机械冲击,消除传动间隙,使钢丝绳张紧,电动机的启动转矩不能过大,一般限制在额定转矩的一半以下;负载下降时,根据重物的大小,拖动电动机的转矩可以是电动转矩,也可以是制动转矩,两者之间的转换是自动进行的;为确保安全,要采用电气与机械双重制动,既减小机械抱闸的磨损,又可防止突然断电而使重物自由下落造成设备和人身事故;具有完备的电气保护与联锁环节。
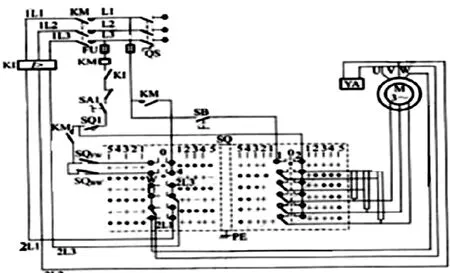
图1 凸轮控制器控制电路原理图
2 桥式起重机控制电路
凸轮控制器控制线路具有线路简单,维护方便,价格便宜等优点,适用于中、小型起重机的平移机构电动机和小型提升机构电动机的控制。5t桥式起重机的控制线路一般就采用凸轮控制器控制。图1所示是采用KTl4—25J/1与KTl4—60J/1型凸轮控制器直接控制起重机平移和提升机构的启停、正反转、调速与制动的电路原理图。下面将分析其主电路。
SQ为电源开关;KI为过电流继电器,用于过载保护;YA为电磁制动抱闸的电磁铁,YA断电时,在强力弹簧作用下制动器抱闸紧紧抱住电动机转轴进行制动,YA通电时,在电磁铁的吸合作用下,电磁抱闸松开;M为三相绕线式异步电动机,该电动机转子回路串联了几段不对称的调速电阻,以减少转子电阻的段数及控制触点的数目。由凸轮控制器在不同控制位置控制转子接入不同的电阻,以得到不同的转速,实现调速。下面分别就凸轮控制器手柄在不同控制位置进行分析:
(1)当手柄处于中间“0”位时,此时凸轮控制器的全部触点都断开,电动机不通电,YA也断电,电动机处于制动状态。
(2)手柄处于右边“1”位时,将凸轮控制器的12对触点从上往下、从左至右进行编号为:1~6,7~12。此时第三对触点接通,其余都是断开的。电动机的定子绕组的“W”端通过触点3与“2L3”相连,“U”端通过触点5与“2L1”相连,“V”端直接与“2L2”相接。当接触器KM的三对主触点闭合时,电动机按正向接线通电,并且此时由于触点8~12是断开的,M三相转予串入全部电阻记为(R5)进行正向启动(电磁转矩向上),通过减速器、卷筒和钢丝绳带动重物。
(3)手柄处于右边“2”位时,右边“2”位与右边“1”位相比较,凸轮控制器多了一对触点接通,即触点8。其作用是切除右边电阻的一段(此时总电阻记为R4),对应的机械特性曲线为曲线2。曲线2的启动转矩比曲线1的启动转矩大了近一倍,此时的电磁转矩一般大于重物引起的负载转矩,可以提起重物上升。
(4)手柄处于左边“l”位,此时凸轮控制器接通的触点为2、4、6。电动机的“U”端通过4接到“2L3”,“W”端通过6接到“2L1”,即电动机反向接线,电磁转矩向下。转子电路串入全部电阻,电动机机械特性曲线为图中第3,4象限的曲线17。
(5)手柄处于左边“2~5”位,与右边“2~5”位一样,凸轮控制器分别把转子电阻分段切除,对应的机械特性曲线如图中第3,4象限的曲线2’~5’,电动机工作点的速度即下降速度依次降低。因此下降重物时,一开始应将手柄迅速扳到下降第5挡,以求先低速下降,再根据重物的情况来选择下降速度。
3 桥式起重机控制线路分析
3.1 控制线路的特点
(1)不能获得轻载的低速下降。在下降操作中需要准确定位时(如装配件),可采用点动操作方式,即控制器手柄扳至下降第一挡后立即扳回零位,经多次点动,并配合电磁抱闸便能实现准确定位。
(2)提升重物时,控制器的第一挡一般为预备级,用于张紧钢丝绳,但也可用于轻载的提升,在二、三、四、五挡时提升速度逐渐提高。
(3)下放重物时,电动机工作在发电制动状态,为此操作重物下降时应将控制器手柄从零位迅速扳至第五挡,中间不允许停留,以防下降速度过快。下降到位,往回操作时也应从下降第五挡快速扳至零位,以免引起重物的高速下落而造成事故。
(4)对于轻载提升,第一挡为启动级,第二、三、四、五挡提升速度逐渐提高,但提升速度变化不大。下降时若重物太轻而不足以克服摩擦转矩,则电动机工作在强力下降状态,即电磁转矩与重物重力矩方向一致,帮助下降。
3.2 控制电路分析
凸轮控制器的另外三对触点1、2、7串接在控制回路中,以控制接触器KM。当操作手柄处于零位时,触点1,2,7都接通、SAl、SQl分别是紧急操作开关和安全门开关,正常运行时都应是闭合的。
3.3 保护联锁环节分析
本控制线路有过电流、失压、短路、安全门、极限位置及紧急操作等保护环节。其中主电路的过电流保护由串接在主电路中的过电流继电器来实现,其控制触点串接在接触器KM的控制回路中,一旦发生过电流,KI动作,KM释放而切断控制回路电源,起重机便停止工作。由KM线圈和零位触点串联来实现失压保护。操作中一旦断电,KM释放,必须将操作手柄扳回零位,并重新按启动按钮方能工作。控制电路的短路保护由FU实现,串联在控制电路中的SAl、SQl、SQFw及SQBw分别是紧急操作开关、安全门开关及提升机构上极限与下极限位置保护开关。
4 预防措施
要预防起重机以上电气故障,需采取以下措施:
(1)管理者增强对电气技术及安全知识理解,把起重机作为一种特种设备放在重要位置。(2)完善操作管理机制、交接班制、定期检查和维护等制度措施。(3)技术人员要增强业务素质,提高技术水平,及时发现故障,把故障彻底解决。(4)要对维修人员进行定期培训,提高其基本技能,增强工作责任心。
总之,通过采取以上措施,可以预防设备受损,提高其使用寿命。
[1]罗伟.起重机电气故障分析及有效措施[J].现代企业文化,2010 (12).
[2]王强,高建貌.浅议塔式起重机的电气检查[J].山西建筑,2009(17).
