一种基于改进的弹性安全换道间距规则的元胞自动机模型
2014-03-26徐洪学张冬梅
徐洪学, 张冬梅
(沈阳大学 信息工程学院, 辽宁 沈阳 110044)
在基于元胞自动机理论的交通流模型中,NaSch模型能表现出交通流从自由运动到堵塞的相变行为,是一种基本的单车道交通流CA模型[1].但单车道模型具有不可超车的局限,因此很多学者提出了各种改进,其中最为重要的一个改进就是Chowdhury提出的STCA(Symmetric Two-lane Cellular Automata)双车道模型. STCA模型最大的特点是引入了换道规则,换道规则的引用更加符合交通流的现实状态[2].然而在STCA模型中,默认所有换道车辆应该满足的安全换道间距都是固定不变的,而现实状况并非如此[3].在STCA模型的基础上,王永明、周磊山等学者提出了弹性安全换道间距的概念,考虑了期望车道后车对换道车辆安全方面的影响.但在实际交通中,驾驶员在决定换道时,不仅要考虑期望车道后车对换道车辆的影响,还要考虑期望车道前车对换道车辆的影响.
本文结合对STCA模型和F-STCA模型的分析,综合考虑了换道车辆与期望车道前车、后车之间可能存在的冲突,提出了一种改进的弹性安全换道间距规则,并提出了基于该规则的双车道元胞自动机模型.
1 STCA模型与FSTCA模型
STCA模型以引入了更加符合现实的交通流状态的“换道规则”而著名,规则的内容为
(1)
式中:Ci表示车i所在的车道,且Ci=0或者1;di,di,other,di,back分别表示第i辆车与前方车辆的间距、与期望车道前方车辆的间距、与期望车道后方车辆的间距;vi表示车i的速度,vi∈[0,vmax];di
为了克服STCA 模型的不足,F-STCA模型引入了换道风险度ξ的概念[4].车辆换道具有一定的风险,风险主要来自换道车辆与相邻车道后方车辆的冲突,冲突的大小主要取决于两个要素:换道并行驶 1 个时间步后,该车辆与后方车辆的间距d以及该车辆与后方车辆的相对速度v.因此,换道风险度ξ定义为
(2)
式中,d>0;v<0表示相邻车辆间距在加大,不具有风险;v>0表示相邻车辆间距在缩小.
F-STCA模型将ξ=5作为换道风险度阈值,采用ξ<5作为判断换道的安全可行性,而不是设定固定的安全间距来判断安全性.基于换道风险度的概念进行推导,可以得出F-STCA模型安全换道的充分条件为di,back>6-min{vi+1,vmax},且F-STCA模型的换道规则为
(3)
式中,di,back>6-min{vi+1,vmax}表示如果换道,期望车道后车的安全间距.
考虑如图1所示的换道情景(vi∈[0,5]),车辆的运行遵循F-STCA模型的弹性换道规则.在t时刻,db=0

图1 换道情景Fig.1 Lane change scenario(a)— t时刻; (b)—t+1/2时刻; (c)—t+1时刻.
注: 图中有数字的元胞表示有车辆占据,且数字为该车的速度.
可能与车c相撞. 车b此时处于两难的境地,这是驾驶人员所不想处于的情况.
2 基于改进的弹性安全换道间距的MSTCA模型
基于上述分析,本文提出一种改进的弹性安全换道规则,将同时考虑期望车道前车及后车对换道车辆存在的潜在冲突.
首先对换道风险度ξ进行重新定义. 换道风险来自车辆换道并行驶一个时间步后,期望车道前方与后方车辆共同对换道车辆造成的冲突,冲突的大小取决于4个要素:①该车辆与期望车道后方车辆的间距dback; ②该车辆与期望车道前方车辆的间距dother; ③该车辆与期望车道后方车辆的相对速度vback;④该车辆与期望车道前方车辆的相对速度vother.即换道风险度ξ定义为
ξ=ξ1+ξ2.
(4)
式中:ξ1表示期望车道后车对换道车辆造成的风险,ξ2表示期望车道前车对换道车辆造成的风险.由ξ1得出要满足的换道条件如式(3)所述,下面重点考虑ξ2的情况.
结合车道的实际运行情况,驾驶人员在进行换道前可能不能直接获知相邻车道前车的速度,因此应该假设出现最坏的情况(vi∈[0,5]):令vi,other最小(且不为0)的情况,换道风险度ξ2的定义为
即
(6)

由此定义,换道规则如下:
(7)
式中,di,other>2min{vi+1,vmax}-2表示如果换道,期望车道前车的安全距离约束.
此换道规则对安全方面进行了充分考虑,更趋向于谨慎型驾驶员可能的行为.将遵循式(7)换道规则的CA模型称为M-STCA模型.
3 数值模拟及分析
对M-STCA模型进行数值模拟,重点考查密度与流量、密度与速度的定量变化关系,用以描述实际问题.
设定初始时刻车辆随机分布在双车道上,车辆连续运行多个时间步,并有不同速度的车辆混合其中,形成多车速混合车流.定义两条L=1 000的一维离散元胞链表示双车道,每个元胞表征实际长度为7.5 m,车辆分布在该元胞链上,即模拟实际长度为7.5 km,vi∈[0,5],边界条件采用周期边界条件.
图2为密度与流量关系图,图3为密度与速度关系图. 观察图2可知,本文模型与STCA模型及F-STCA模型相比,其优越性能够得以体现.观察图3可知,本文模型能够获得的速度更大,特别是在低密度区,本文模型的优势明显.
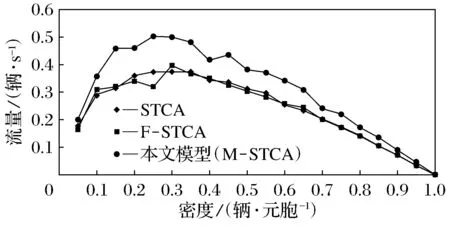
图2 密度与流量关系图Fig.2 Relationship between density and flow chart

图3 密度与速度关系图Fig.3 Relationship between density and velocity
4 结 语
本文在分析前人理论研究的基础上,重新定义了换道风险度的概念,并进一步提出了基于弹性安全换道间距的双车道元胞自动机模型(M-STCA),且将该模型应用于混合交通流中并进行了数值模拟与分析.结果表明,该模型既注重安全因素,避免了乒乓换道的可能,同时又提高了道路利用率,增大了流量.
参考文献:
[1]李新刚. 基于元胞自动机模型的交通系统微观建模与特性研究[D]. 北京: 北京交通大学, 2009:3-13.
(Li Xingang. Microscopic Modeling and Properties and Analyzing of Transportation System Based on Cellular Automata Model[D]. Beijing: Beijing Jiaotong University, 2009:3-13.)
[2]敬明,邓卫,王昊,等. 基于跟车行为的双车道交通流元胞自动机模型[J]. 物理学报, 2012,61(24):244502.
(Jing Ming,Deng Wei,Wang Hao, et al. Two-lane Cellular Automaton Traffic Model Based on Car Following Behavior[J]. Acta Physica Sinica, 2012,61(24):244502. )
[3]王永明,周磊山,吕永波. 基于元胞自动机交通流模型的车辆换道规则[J]. 中国公路学报, 2008,21(1): 89-93.
(Wang Yongming,Zhou Leishan,Lü Yongbo. Lane Changing Rules Based on Cellular Automaton Traffic Flow Model[J]. China Journal of Highway and Transport, 2008,21(1):89-93.)
[4]王永明,周磊山,吕永波. 基于弹性安全换道间距的元胞自动机交通流模型[J]. 系统仿真学报, 2008,20(5):1159-1162.
(Wang Yongming,Zhou Leishan,Lü Yongbo. Cellular Automaton Traffic Flow Model Considering Flexible Safe Space for Lane-changing[J]. Journal of System Simulation, 2008,20(5):1159-1162.)
