PVDF微力传感器的设计
2014-03-22吴晓军赵河明
刘 廷,吴晓军,赵河明
(中北大学机电工程学院,山西太原 030000)
0 引言
随着微机电系统(micro electro mechanical systems,MEMS)的不断发展,迫切需要高精度、高灵敏度的感知传感器。本文设计的微力传感器采用一种新型的压电材料PVDF,PVDF压电膜是一种新型高分子压电换能材料,它具有独特的介电效应、压电效应、热电效应。与传统的压电材料(如陶瓷)相比具有频响宽、动态范围大、力电转换灵敏度高、机械性能强度高、声阻抗易匹配等特点,并具有质量轻、柔软不脆、耐冲击、不易受水和化学药品的污染、易制成任意形状的面积不等的片或管状等优势。在力学、声学、光学、电子、测量、红外、安全报警、医疗保健、军事、交通、信息工程、办公自动化、海洋开发、地质勘探等技术领域应用十分广泛。压电式传感器具有低功耗、灵敏度高等特点,但是与传统的压阻式传感器比起来,其尚处于发展初期。本文基于PVDF的压电效应,设计了一款具有高精度、高灵敏度的微力传感器。压电效应是Jacques Curie和Pierre Curie在1880年发现[1]的,几十年来人们对压电材料的应用研究一直没有停止过。目前悬臂梁最频繁地应用在微力感知机构中[2],这是因为探测极小的位移时,悬臂梁是最理想的装置[3]。2002年香港中文大学[4-5]的Carmen K.M.fung,李文荣等,2003年美国密西根州立大学的ImadElhaj,申延涛,席宁[6]研究出基于PVDF的1维和2维悬臂梁复合结构微力传感器。申延涛等通过采用高阻抗的放大器及电压放大器较好地解决了检测静态力的问题[7-8]。但仍然可以进一步改进其结构和性能。感知信号经过微分电荷放大器、电压放大器和低通滤波电路,最终由采集卡采集电压信号。
1 系统组成
所设计的微力传感器主要包括硬件电路设计和PWDF材料的固定。图1为微力传感器测试系统的功能实现过程。

图1 系统组成
当PVDF受到一个外部力时,在PVDF两极板上会产生一定量的电荷,电荷经过电荷放大器转换为电压信号,然后经过电压放大电路,对电压信号进行放大,经过A/D采样,送给MCU进行处理,换算成力的数值,通过液晶显示出来PVDF感知端所受到的力。
2 PVDF微力传感器的模型
一维PVDF微力传感器的结构示意图如图2所示。图中各参数如下:
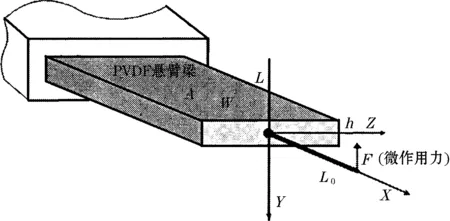
图2 微力传感器结构示意图
W为PWDF薄膜的宽度;L为PVDF薄膜的长度;h为PVDF薄膜的厚度;A为PWDF薄膜的表面积(L×W);a为PVDF薄膜的截面积(W×h);L0为探针的长度。
根据压电特性,PVDF表面产生的电荷Q可以表示为:

上式表示PVDF表面产生的力与电荷Q之间的函数关系,在实际应用中电荷Q很难测得。为了便于测量,降低噪声,提高微力传感器的精度,必须设计信号处理电路将电荷信息转换为电压信息。
3 硬件电路设计
3.1电源设计
电源是给电路提供能量的重要部分,同时电源是否稳定直接影响到信号调理电路的误差大小。信号调理电路模块包括电荷放大电路与电压放大电路。对称供电的运放在交流应用时可改用单电源工作,但改变供电方式也带来偏置、带宽、稳定性等问题。因此在设计运放供电电源时采用双电源供电,通过电源转换芯片把直流5 V电压转换成±12 V电源,通过高频滤波电容对±12 V的电压进行滤波,为了增加电源的稳定性同时加上了一个10 μF极性电容。电路图如图3所示。

图3 电源电路
3.2电荷放大电路设计
电荷放大电路的核心是将PVDF上受力产生的感知电荷转换成电压信号。其电路结构如图4所示。图中方框部分为与传感器等效的与电容串联的电荷源,从功能来看,其是一个电荷发生器,同时也是一个电容器。电荷放大器是一种深度电容负反馈放大器,输出电压信号与输入电荷信号成正比,具有高输入阻抗。

图4 电荷放大电路
OPA129由于其独特的性能,非常适用于传统上采用真空静电计管所组成的静电计放大器方面的应用,如静电计、质谱仪、色谱仪、电荷放大器等。这些应用的特殊之处在于它们具有极高的源阻抗,或是需要对极低的电流进行测量和放大,因而特别要求放大器的高阻抗、低噪声和超低偏置电流特性。
3.3电压放大电路设计
电压放大电路中,常用的放大器为仪表放大器和运算放大器。因为仪表放大器具有低漂移、低功耗、高共模抑制比等特点,所以它一般被应用于噪声环境下小信号的放大。它的工作原理是将差分小信号叠加在较大的共模信号之上,能够去除共模信号的影响,同时又能将差分小信号放大。文中采用图5的电压放大电路。

图5 电压放大电路
AD620的增益通过滑动电阻Rg进行编程,或者更准确地说,通过引脚1与引脚8之间存在的任何阻抗进行编程。对于任何增益,可用下式计算Rg:
4 试验
为了对传感器的性能参数进行标定,在设计中采用 MATLAB / Simulink模块编写了数据采集程序,采集卡选用PCI-6221,该采集卡具有16位采集精度,250 KS/s的采集速度,和16路模拟输入口。采集程序如图6所示,选用采集卡的2路采集通道,分别采集激光位移传感器的数据和调理电路的电压数据。

图6 Simulink数据采集程序
4.1试验标定PVDF受力产生应变和电压
采用激光位移测量PVDF受力变形的位移,调理电路输出PVDF感知信号。对试验数据进行分析,用MATLAB软件对试验数据进行拟合,此处选用最小二乘法进行拟合,得到输出电压与PVDF位移之间的关系,如图7所示。

图7 最小二乘拟合输出电压与应变之间的关系
最小二乘法拟合直线:
U=6.532δ-0.209 9
式中:U为微力传感器信号调理电路产生的电压值;δ为PVDF在力的作用下产生的变形。
4.2试验标定PVDF受力和应变
对微力传感器受力和产生应变进行标定,标定所使用的电子称测量PVDF所受的压力,电子称的分辨率是0.01 g,操作千分尺微操作台的微调旋钮调节PVDF的应变大小,读出电子称显示的数据,对数据进行记录。用MATLAB软件通过最小二乘法对实验数据进行拟合,得到如图8所示的试验曲线。

图8 PVDF应变和其所受力拟合曲线
最小二乘法拟合直线:
F=2.177 744δ+0.007 4
式中:F为微力传感器感知的力;δ为PVDF在力的作用下产生的变形。
4.3试验结论
通过上面的两个公式最终得到输出电压与PVDF所受力之间的关系公式:
式中:F为微力传感器感知的力;U为微力传感器信号调理电路产生的电压值。
经过试验计算得到微力传感器的各项数据如下:
(2)分辨率:DSP2812自带12位A/D转换器,限制最大采样电压为3 V,最小分辨率为2.44 N;
(3)线性度:实际数据与拟合曲线最大偏差为30 N,则线性度为最大偏差与满量程之比,并算出文中微力传感器线性度为0.3%;
(4)量程:0~1 g(10 mN);
(5)频率响应:PVDF 悬梁在120 dB(Hz)范围内有良好的频率响应。
参考文献:
[1]CURIE J,CURIE P.Development par pression delect recite polaire dansles cristauxhem iedres faces inclines.Bull SocM in de France,1880(3):90-93
[2]GEHRING G A,COOKE M D,GREGORY I,et al.Cantilever unified theory and optimization for sensors and actuators.Smart Mater.Struct,2000(11):918-931.
[3]DATSKOS P G,THUNDAT T,LAVRIK N V.Micro and nanocantilever sensors in Encyclopedia of Nanoscience and Nanotechnology.American Scientific Publishers,2004(X):1-10.
[4]FUNG C K M,LI W J,ELHAJJ I,et al.Intemet-Based Remote Sensing and Manipulation in Macro Environment,2001 IEEEIASME International Conference on Advanced Intelligent Mechatronics,2001( 2):695-700.
[5]FUNG C K M,ELHAJJ I,LI W J,et al.A 2-D PVDF Force Sensing System for Micro-manipulation and Micro-assembly.ICRA02,2002:1489-1494.
[6]ELHAJ I,SHENT Y,XIT N,et al.A high sensitivity force sensor for Microassembly :design and experiments.Proceedings of the 2003 lEEE/ASME International Conference on Advanced Intelligent Mechatronics AIM,2003:703-708
[7]SHEN Y T,XI N,LAI K W C,et al.A novel PVD Fmicroforce/force rate sensor for practical applications in micromanipulation.Sensor Review,2004,24(3):274-283.
[8]SHEN Y,XI N,SONG B,et al.Networked human/robot cooperative environment for tele-assembly of MEMS devices.Journal of Microme chatronics.2006,3(3-4):239-266.
作者简介:刘廷(1988-),硕士研究生,研究方向为仪器仪表,智能检测。E-mail:375276327@qq.com
吴晓军(1963-),教授,博士,主要研究领域:可靠性,机械电子等方向。E-mail:364852331@qq.com
