异质信号干扰下质量流量数据融合研究
2014-03-21林胜
林 胜
(合肥工业大学机械与汽车工程学院,安徽合肥 230009)
0 引言
随着工业的飞速发展,质量流量测量所面临的任务越来越繁重,质量流量传感器准确度要求不断提高,在实际工况压力、温度以及介质密度条件下,它的测量准确度是人们较为关心的问题。虽然质量流量传感器的生产厂家给出了压力修正系数、温度修正系数、密度修正系数等,但是在不同的标定工况压力、工艺温度、介质密度下质量流量并非完全成线性比例关系。文献[1-2]分析了质量流量计的发展状况;文献[3]对影响质量流量的压力、介质密度、工艺温度因素进行了研究,得到了各因素对流量的影响的关系,并给出了各因素的修正方法;文献[4-5]分析了在压力对质量流量的影响情况;文献[6]分析了在压力的干扰下对质量流量采用BP神经网络算法进行融合。 然而在实际的现场工作中,质量流量测量的除了受工况压力的影响,还受到测量介质种类、测量介质特性(温度、黏度、相态、导电性、腐蚀性等)和流量变动特性的适应能力以及对环境条件适应能力等方面的影响。故选取对质量流量影响最大的压力、工艺温度、介质密度等因素进行系统分析研究,用神经网络算法对工况压力、工艺温度、介质密度干扰信号进行抑制,验证相关方法的有效性。
1 异质传感器数据的采集
系统设定情况为:相同的质量流量(150 t/h)条件下,标定不同的工况压力(0.1~30 MPa),对质量流量、密度、温度进行测量。其中采用均匀分布在不同位置处的10个质量流量传感器、5个密度传感器、5个温度传感器对同一工况条件下的质量流量、介质密度、工艺温度分别进行测量。
表1是在标定0.1 MPa压力下,质量流量控制系统中有10个传感器同时对质量流量进行采集,每0.5 s采集1次,5 s的采集结果算作1组,将10次测量的平均值作为该传感器所采集的质量流量的数据。
2 同一工况下质量流量数据融合
为了使采集的质量流量数据更准确,在同一个工况下对质量流量计进行多次测量,并对质量流量数据进行分布图法剔除和自适应加权法融合。
将质量流量数据的10个平均值按从小到大顺序排列:148.84 t/h,149.82 t/h,149.89 t/h,149.94 t/h,149.95 t/h,149,96 t/h,149.96 t/h,150.06 t/h,150.55 t/h,151.42 t/h.
应用分布图法进行疏失误差的剔除。在分布图中能反映数据分布结构的参数主要是:中位数、上四分位数、下四分位数、四分位数离散度。剔除方法参照文献[6],剔除后剩下数据为:149.82 t/h,149.89 t/h,149.94 t/h,149.95 t/h,149 t/h,96 t/h,149.96 t/h,150.06 t/h,150.55 t/h.
根据自适应加权法的Matlab程序得出质量流量数组[149.82,149.89,149.94,149.95,149,96,149.96,150.06,150.55],相对应加权因子数组 [ 0.059 5、0.033 2、0.142 9、0.099 3、0.239 1、0.069 7、0.139 5、0.216 9],融合的结果为149.954 2 t/h,融合结果较测量的数据精度提高,且误差小于0.05 t/h.
对于其他工况下的质量流量的融合结果如表2所示,其中介质密度和工艺温度采用多个传感器多次测量求平均值的方法测得,从表2看出压力的增大对质量流量的影响最大,且融合的结果误差最大接近5 t/h,所以需要对融合数据进一步融合,期望达到精度要求。
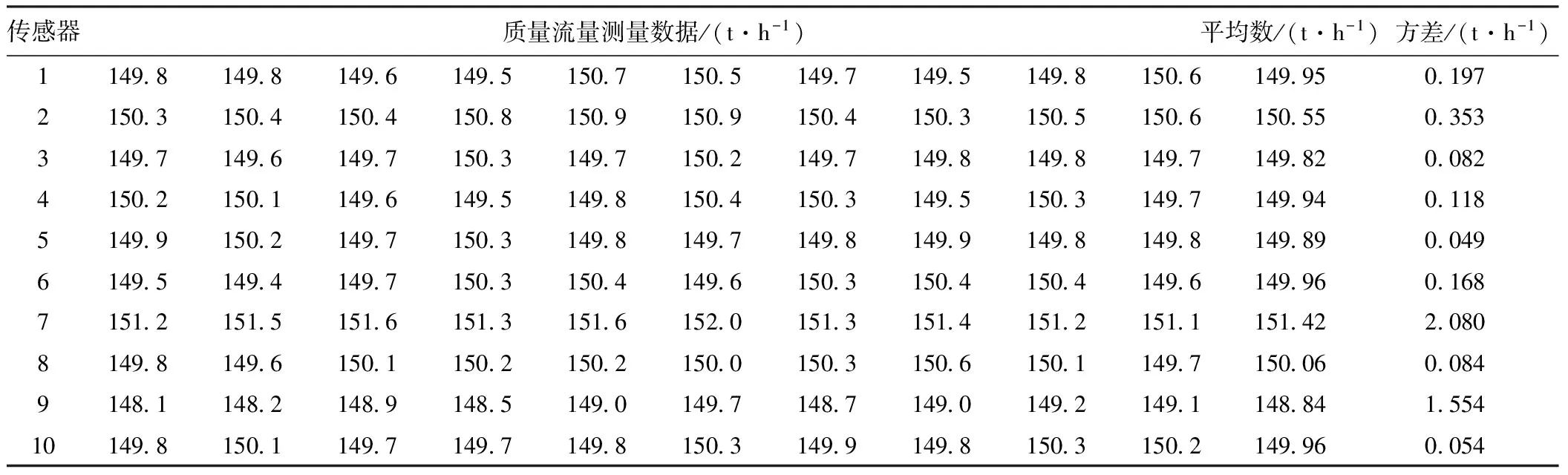
表1 一组质量流量传感器测量数据
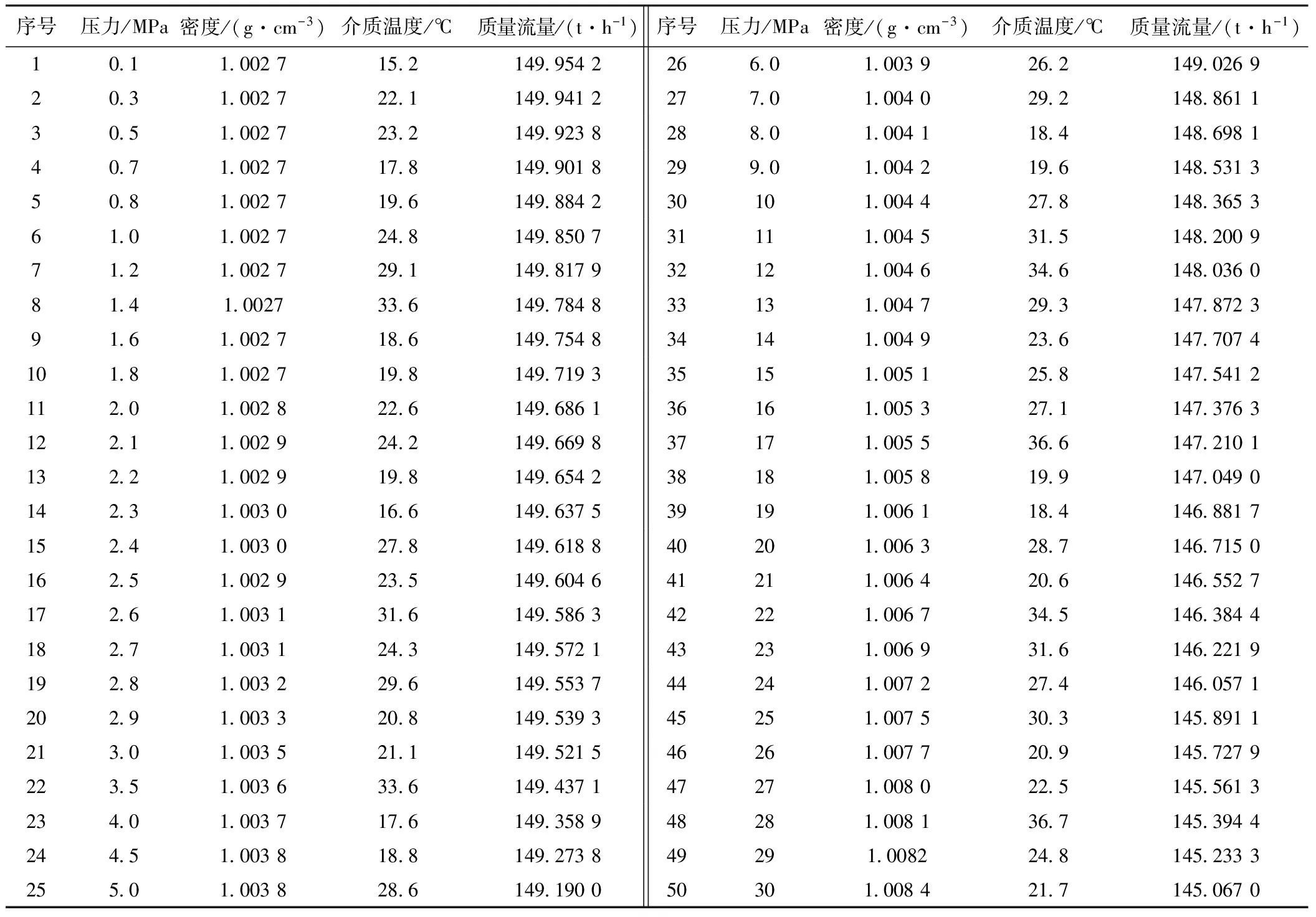
表2 不同压力下各个因素测量数据融合值
3 BP神经网络模型
由于压力、介质密度、工艺温度对质量流量的测量产生了影响,且影响因素中压力对质量流量测量值的精度影响最明显,因此为了抑制压力、介质密度、工艺温度对测量数据的影响,采取BP神经网络进行数据融合,以得到更高精度的测量数据。
3.1BP神经网络结构
研究采用三层BP神经网络建立预测在异质信号干扰下的质量流量的模型,BP神经网络包括输入层、一个隐含层和输出层,上下层之间实现全连接,每层神经元之间没连接,输入层为4个节点,输出层为1个节点。针对工况压力、温度、密度对质量流量的影响,建立压力、温度、密度、质量流量神经网络模型,输入为压力、温度、密度和质量流量,输出为质量流量。
3.2输入、输出数据的归一化
数据进行神经网络训练之前,需要对各影响因素进行归一化处理,即将数据转化到[0,1]区间[8]。
式中:xki为归一化后数据;Qmax,Qmin为输入数据的第i个分量的样本的最大值和最小值;设定参数a=0.9,b=0.05[8]。
由于神经网络输入数据是归一化后的结果,所以输出的模拟值还要做反归一化处理,公式如下:
3.3BP神经网络的学习方法[8-10]
文献[6]表明BP神经网络算法中没有经过改进的梯度下降法的精度最低,所以文中采用BP神经网络改进后的算法:自适应学习速率调整法和附加动量法对样本进行训练。
在标准的BP算法中,学习速率η定为常数,然而在实际应用中,很难确定一个由始至终都合适的最佳学习率。采用自适应学习速率法,在误差曲面的不同部分采用不同的学习速率能提高神经网络的准确性。为了加速收敛过程,一个较好的思想是自适应改变学习率,使网络的训练在不同的阶段自动设置不同学习速率。
附加动量法使网络在修正其权值时,不仅考虑误差在梯度上的作用,而且考虑在误差曲面上变化趋势的影响,其作用如同一个低通滤波器,它允许网络忽略网络上微小变化特性。该方法在反向传播法的基础上,在每个权值的变化上加上一项正比于前次权值变化量的值,并根据反向传播法来产生新的权值变化。
3.4隐含层隐节点数的确定
隐含层节点数的选择是人工神经网络最为关键的步骤,文中采用试凑法确定最佳隐节点数。试凑法是确定最佳隐节数常用的方法,在用试凑法时,确定隐节点数采用如下经验公式:
式中:k为隐层节点数;n为输入层节点数;m为输出层节点数;α为1~10之间的常数[8-9]。
4 BP神经网络训练结果
把标定压力为0.1~30 MPa的数据作为训练样本。运算过程中如果精度达到要求即可停止训练,否则可以通过增加训练次数来达到训练的要求。文中分别采用自适应学习速率调整法和附加动量法对BP神经网络模型进行训练。隐层数选取的方法,改变隐节数,同样对每个隐节数对应的样本进行10次训练,对10次的结果进行比较,选取最佳的隐节点数。保证模型的准确性,改变动量因子,同样进行10次训练。BP神经网络的训练结果如表3~表5所示。
从表3中对比各个隐节数时的参数,选取节点数7为BP神经网络自适应学习速率调整法的隐含层节点数。
从表4中选取节点数13作为BP神经网络附加动量法节的隐含层节点数。
从表5中选选定动量因子为0.90作为BP神经网络附加动量法节的附加动量因子。
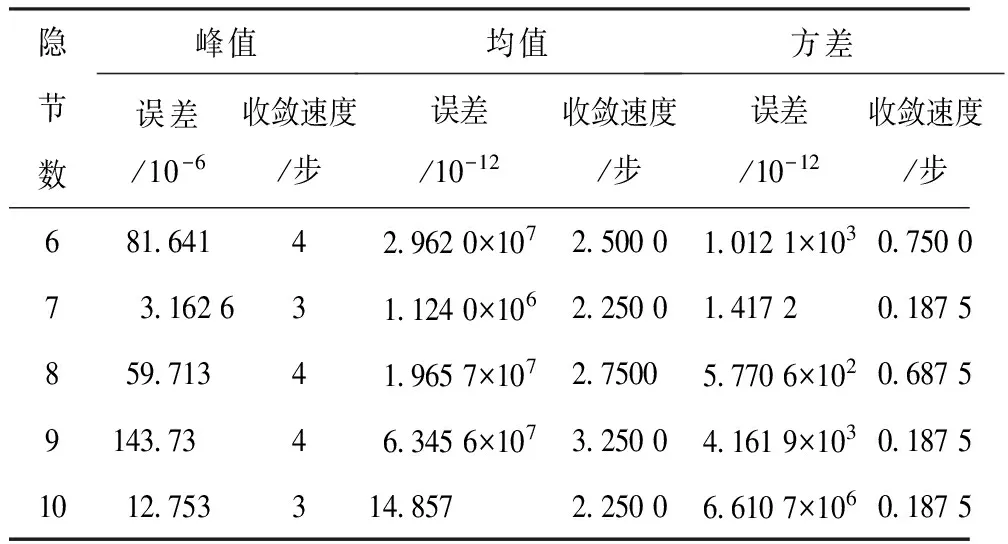
表3 自适应学习速率调整法节点数选取表
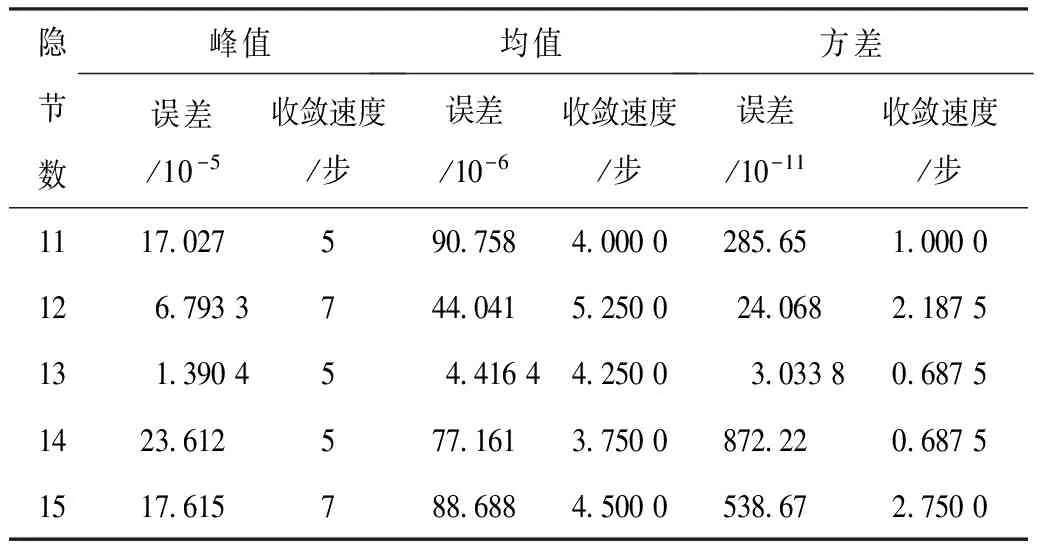
表4 附加动量法节点数选取表
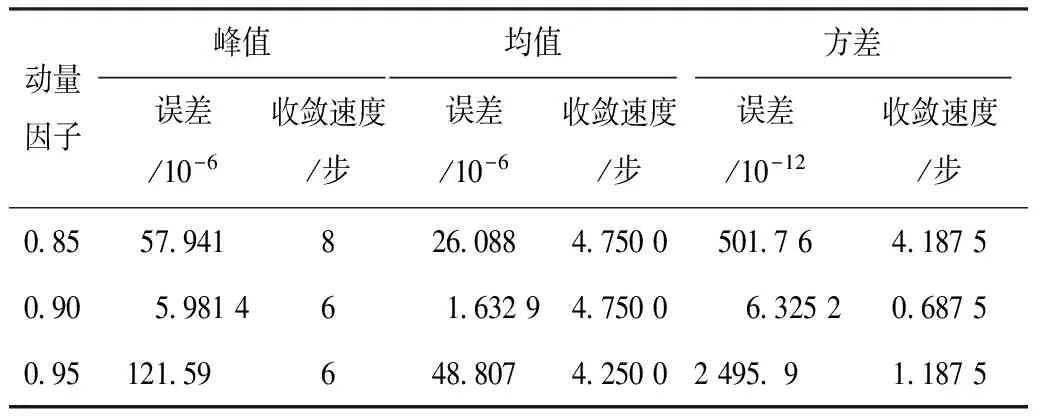
表5 动量因子选取比较表
5 BP算法结果比较
根据上述的训练结果选取合适的BP神经网络的参数,对10组不同工况下的数据进行融合,得到对应的质量流量的数据,如表6所示。通过表6比较分析表中两种不同的BP神经网络融合结果,可以较为直观地得到:自适应学习速率调整法和附加动量法所得的融合结果误差均控制在0.01 t/h以内,融合结果的控制精度得以保证;通过表7对比分析对于自适应学习速率调整法和附加动量法的融合结果近似,其中自适应学习速率调整法的融合精度要优于附加动量法。
为了更好地比较两种BP神经网络算法的融合效果,描绘出两种BP神经网络的融合结果曲线图如图1,可以看出自适应学习速率调整法整体比附加动量法离真值更加接近,受压力、工艺温度、介质密度因素的干扰最小。
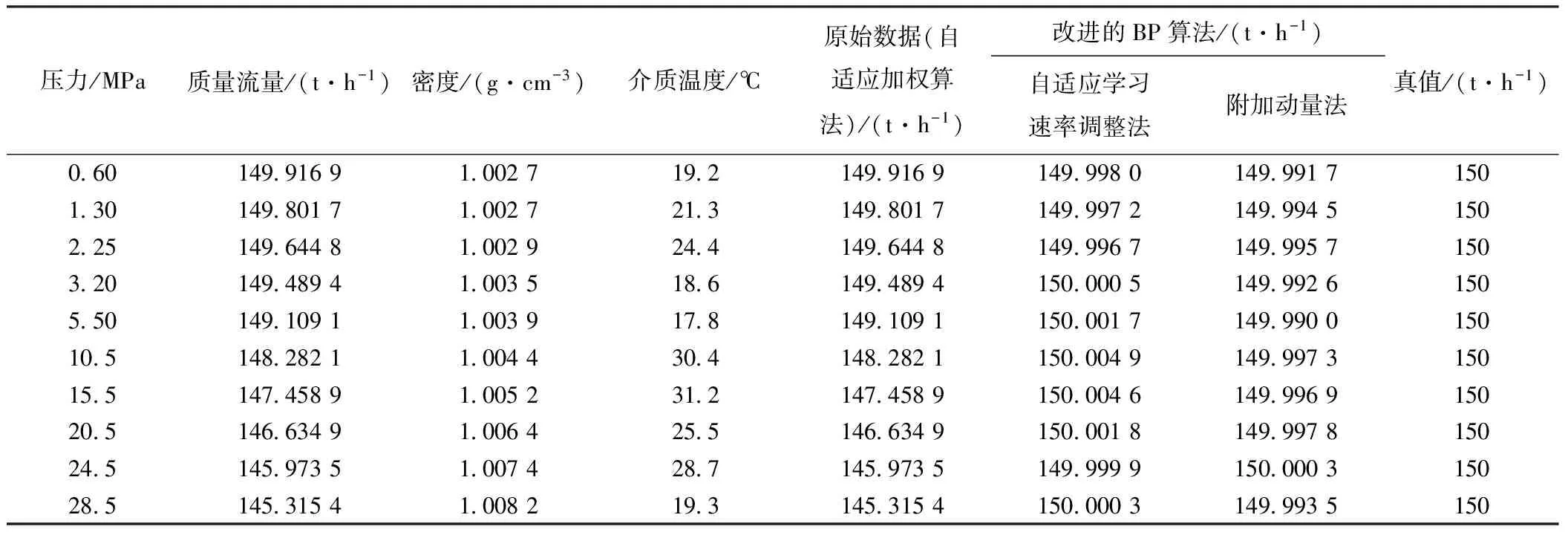
表6 BP算法结果比较

表7 融合结果误差方根分析
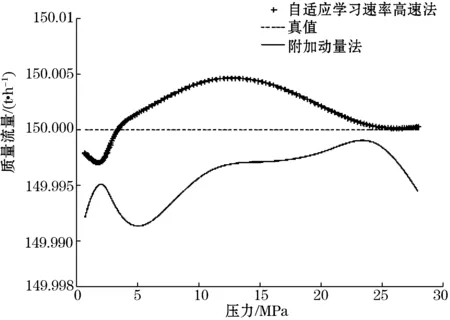
图1 两种BP神经网络算法融合结果比较
6 结束语
为了获得高精度的质量流量值,研究在不同压力、介质密度、工艺温度的条件下对采集的异质数据进行信息融合处理。首先利用分布图法剔除不符合精度低的质量流量数据,然后利用自适应加权算法对某一工况条件下的质量流量进行融合,由于受到压力、介质温度,密度的影响,虽然融合结果有明显的提高,但达不到精度的要求。因为压力、工艺温度、介质密度对流量的影响是一种非线性的影响,所以采用BP神经网络改进后的两种算法建立误差小,稳定性好的模型,对多组数据进行信息融合。证明BP神经算法对异质传感器信号数据融合的可行性,其中自适应学习速率调整法的融合精度要优于附加动量法。
参考文献:
[1]张学庆.流量测量的意义及流量传感器的现状.石油化工自动化,2005(5):99-101.
[2]任鸿威,高汉超.质量流量计及其应用综述.化工自动化及仪表,1997,24(5):62-65.
[3]李彦林,梁新连.影响质量流量计准确度的因素及解决办法.计量技术,2004(8):55-57.
[4]袁国富.工况压力对质量流量计测量准确度的影响.工业控制计算机,2004,17(4):5-6.
[5]李江,李洪阳,张鹏.质量流量计压力损失的能耗研究.化工自动化及仪表,2010,37(12):63-65.
[6]汪洪波,唐志国,马培勇,等.压力信号干扰抑制的质量流量数据融合研究.中国机械工程,2012,23(18):2223-2227.
[7]刘贵霞,沈兴武.流量测量仪表的应用现状和发展趋势.中国化工装备,2004(1):21-23.
[8]施彦,韩力群,廉小亲.神经网络设计方法与实例分析.北京:北京邮电大学出版社,2009.
[9]周开利,康耀红.神经网络模型及其MATLAB仿真程序设计.北京:清华大学出版社,2009.
[10]GAO J B,HARRIS C J.Some remarks on Kalman filters for the multisensor fusion.Information Fusion,2002(3):191-201.
[11]焦竹青,熊伟丽,徐保国.基于加权最小二乘法的异质传感器数据融.吉林大学学报,工学版,2010,40(3):816-820.
[12]SUN X J,GAO Y,LI Z,et al.Multi-model information fusion Kalman filtering and white noise deconvolution.Information Fusion,2010(11):163-173.