超精密纳米时栅传感器试验系统设计
2014-03-21周启武
周启武,凌 旭
(重庆理工大学,机械检测技术与装备教育部工程研究中心,时栅传感及先进检测技术重庆市重点实验室,重庆 400054)
0 引言
纳米位移测量技术及器件是纳米数控机床、极大规模集成电路专用设备和国防军工特殊需求等超精密高端装备的核心技术和关键功能部件,是实现纳米精度定位与控制的“眼睛”,直接决定和影响着主机的性能[1-3]。目前,在大量程、高分辨率、高精度的位移测量场合,仅有激光干涉仪和光栅尺是实现mm级以上量程、纳米级分辨力的位移测量工具。
光栅的测量精度依赖于精密光刻的技术水平,光刻技术受光波波长和光学衍射极限的制约[4]。激光干涉仪测量精度取决于激光波长,nm级测量已接近激光波长[5]。因此,在nm级精度测量领域,光栅与激光干涉仪均有各自无法突破的瓶颈,需要一种新的测量方法来解决大量程纳米精度位移测量的问题。
纳米时栅位移传感器(简称纳米时栅)是在时栅原理的基础上提出的一种基于交变电场耦合的时栅测量方法,其基本原理是“利用时空转换思想,以时间测量空间”,即用时间量构成空间测量基准[6-8],利用时间尺度来提高空间尺度测量的分辨力与精度,以避免光波波长和光学衍射极限对纳米位移测量的影响。
1 纳米时栅的工作原理
纳米时栅模型如图1(a)所示,包括:动尺和定尺部分,在动尺和定尺基体上面通过半导体光刻技术镀上一层电阻率极低的金属薄层电极。其对应的形状为:动尺电极为正弦形状,定尺电极为矩形。动尺电极两路对称分布,用导线将感应信号引出。如图1(b)所示,定尺电极同样成两排布置,但上、下排电极的起始位置相差1/2个电极宽度W(1~58为电极片),每个电极片之间有一定的间隙。

(a)纳米时栅测量简易模型

(b)定尺电极的连接图
定尺上排的奇数号电极连成一组,偶数号电极连成一组,两组电极组通A激励相信号;下排的奇数号电极连成一组,偶数号电极连成一组,两组电极组通B激励相信号。动尺与定尺正对平行放置,间隙为δ.动尺上排电极与定尺上排电极正对,动尺下排电极与定尺下排电极正对,形成上、下两组差动电容。
将A、B两路激励信号通过变压器产生4路激励信号,如图2所示,其中,A、B激励相的表达式为:
UA=Umsin(ωt)
(1)
UB=Umsin(ωt+π/2)=Umcos(ωt)
(2)
式中:Um为激励信号幅值;ω为激励信号频率;t为时间量。
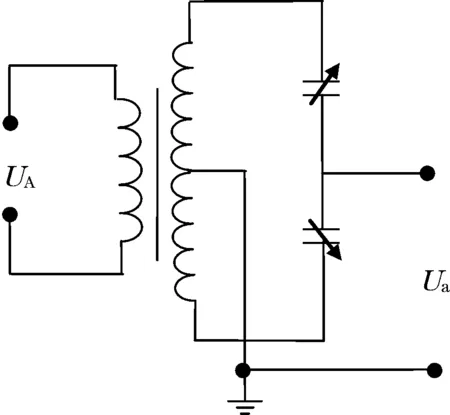
图2 A激励相差动电容模型
当动尺与定尺发生相对移动时,动尺电极耦合的电压值与正对覆盖面积呈周期性变化,动尺两组正弦电极耦合信号分别为Ua、Ub,并形成两路驻波,其表达式为:
(3)
(4)
式中:Ke为电场耦合系数;x为动尺和定尺之间的相对位移;W为电极宽度。
将输出的两路电场耦合信号Ua、Ub通过加法器合成输出一路行波信号Ux,表示为:
Ux=Ua+Ub

(5)
合成后的正弦行波信号Ux与一路相位固定的同频率参考正弦信号Ur接入整形电路处理,转换为同频的两路方波信号后,送入比相电路进行处理,利用高频时钟插补技术得到两路信号的相位差,经微机系统处理后即可得到纳米时栅位移传感器动尺与定尺之间的直线位移量。
2 试验系统设计
研究纳米时栅位移传感器的设计理论的前提是一套超精密的试验系统,根据纳米时栅的原理要求,所设计的超精密试验系统框图如图3所示,包括:精密导轨系统,用于驱动动尺的运动导向,通过精确控制导轨的运动来实现动尺的运动控制;精密基座机构,用于安装定尺,通过粗调和微调基座来保证动、定尺之间平行且等间距;高精度激励源,用于激励信号的精度且保持信号同步性,提高精度且同步的激励信号源,为纳米时栅激励信号提供保证。

图3 超精密试验系统框图
2.1运动导轨系统设计
纳米时栅动尺的运动需要借助于运动导轨,将其安装在导轨上。因此,动尺的运动特性取决于运动导轨的运动特性,一套精密的运动导轨系统是超精密试验系统的前提。
传统的直线导轨系统一般采用的是以滚珠丝杠螺母副为核心的机械传动链,由伺服电机通过滚珠丝杠螺母副驱动机床的工作台作直线运动。精密滚珠丝杠螺母副传动虽然具有刚度高、跟随灵敏、定位精度高等优点,但丝杠的制造误差、装配误差、以及传动间隙误差都会对控制精度产生影响。在测试纳米时栅特性的过程中需要移动速度约10 μm/min,若采用滚珠丝杠传动,则不容易保证控制精度。因此,为了实现高速、低速、高精度运动,通常采用无阻尼的气浮导轨。特别是在纳米时栅特性测试过程中,为了提高系统的快速响应能力,多数系统采用空气静压导轨实现非接触支撑,并采用直线电机驱动。这样,不存在导轨摩擦或者丝杠传动等机械约束,有利于提高系统的快速响应性能,减少系统建立时间。
实验系统中,采用美国AEROTECH公司的精密直线气浮系统作为驱动动尺移动,其行程为1 200 mm,精度0.75 μm/m.该气浮导轨安装在大理石光学平台上面,减少基面的膨胀变形。通过气浮导轨系统的搭建,符合超精密纳米时栅传感器动尺的试验要求。
2.2试验基座机构的设计
通过多次试验,发现试验的每次安装不能保证动、定尺平行且等间距,通过示波器测量动尺的感应信号,发现两路感应信号的幅值不相等。因此,需要设计一个可以调节5个自由度的基座机构来安装定尺,通过调节基座机构的5个自由度,来满足动、定尺的间距相等且平行。如图4所示,设计的基座具有X、Y、Z轴移动,绕Y、Z轴转动的五自由度机构。采用螺旋测微器原理设计每个轴,使其可以实现大位移和微位移。每次试验的过程中,通过示波器测量感应信号的幅值,微调五轴,可以使得两路信号幅值相等。通过五自由度基座的设计,可以保证每次试验安装环境的一致性,满足超精密纳米时栅试验系统的设计要求。

1—绕Z轴旋转轴;2—X轴;3—Y轴;4—绕Y轴旋转轴;5—Z轴;6—定尺;7—动尺;8—动尺安装板;9—气浮直线导轨
2.3高精度激励信号系统设计
LabVIEW软件是一种用图标代替文本创建应用程序的图形化编程语言,具有直观、简便、快速、易于开发等特点。PXI-5422是专为需要带宽的时域和频域测量应用而设计,它提供80 MHz的带宽,低脉冲偏移、低交调失真。它还包括以下诸多特性:模拟波形编辑器用于快速创建测试波形;利用SMC 技术实现与其他PXI模块间的ns级同步;高达512 MB的可共享波形与序列存储;84 MB/s 波形数据下载速率等[10]。
利用虚拟仪器开发平台LabVIEW软件和PXI-5422任意波形发生器硬件设备,设计纳米时栅信号激励系统,为研究纳米时栅试验提供了必要条件。
2.3.1前面板设计
根据纳米时栅激励信号试验要求,所设计的前面板包括:波形参数、硬件板卡选择、采样率、停止按钮、波形幅值与增益、波形直流偏置等设置。如图5所示,仪器前面板中控件主要分为2部分,右边部分为所产生的波形图显示控件,从上往下依次为:方波、正弦及余弦。左边部分为参数输入控件,左上部分为通道选择部分,总共3路通道对应于纳米时栅的两路信号源与方波。左下部分为对3路信号的参数的设置,可以设置幅值、相位、Gain(增益)、偏置等相关参数。
2.3.2信号激励试验系统程序框图设计
5路信号的产生采用NI-FGEN模块化仪器信号发生器,它能产生任意波形,利用NI-TCLK模块使其输出同步信号。
信号产生流程图如图6所示。程序框图设计如图7所示,程序设计中采用for循环、While循环和Case条件判断结构构成系统程序框架。

图5 激励信号前面板

图6 信号产生流程图

图7 程序框图
3 试验研究与分析
3.1试验平台搭建
根据纳米时栅传感器试验系统要求,搭建如图8所示的试验系统平台。包括:虚拟仪器系统,用于提供高精度的激励信号;精密气浮直线导轨系统,用于实现动尺各种运动特性;纳米时栅信号处理系统,用于将动尺感应信号进行处理得出纳米时栅测量值;精密试验基座机构及激光干涉仪系统(精度±0.7 ppm),用于标定,将其值作为标准值。

图8 纳米时栅传感器试验系统平台
3.2试验结论
通过气浮导轨系统的控制,激光干涉仪作标定。每隔5 mm的行程与纳米时栅位移传感器的值对比,测量200 mm范围内得出纳米时栅的原始误差值。如图9所示,纳米时栅在200 mm范围内去原始误差值约700 nm,符合纳米时栅传感器设计要求。因此,所设计的超精密纳米时栅试验系统满足试验要求。

图9 误差曲线
4 结束语
通过精密气浮直线导轨系统设计,使得纳米时栅动尺的运动特性提供了保障;精密实验基座机构设计,为动、定尺的安装环境的一致性提供了有利的帮助;高精度的激励信号设计为纳米时栅实验提供了方便。通过超精密纳米时栅实验平台的搭建,为纳米时栅传感器实验研究提供了基础,为下一步纳米时栅传感器系统的设计与精度的进一步提高奠定了基础。
参考文献:
[1]王国彪,黎明,丁玉成,等.重大研究计划“纳米制造基础研究综述”.中国科学基金,2010(2):70-77.
[2]王伯雄.微纳米测量技术.北京:清华大学出版社,2006.
[3]陈本勇,李达成.纳米测量技术的挑战与机遇.仪器仪表学报,2005,26(5):547-550.
[4]邹自强.论纳米光栅测量技术.纳米技术与精密工程,2004,2(1):8-15.
[5]HANSEN H N,CARNEIRO K,HAITJEMA H,et al..Dimensional Micro and Nano Metrology,Annals of the CIRP,2006,55 (2):721-743.
[6]彭东林.时栅位移传感器与新型机床动态检测系统.北京:科学出版社,2010.
[7]彭东林,刘小康,张兴红,等.时栅位移传感器原理与发展历程.重庆理工大学学报自然科学版,2010(10):40-45.
[8]LIU X K,PENG D L,ZHU G,et al..Time-space Concept for Precision Measurement.Chinese Journal of Mechanical Engineering,2008,21(3):112-115.
[9]雷振山,肖成勇.LabVIEW高级编程与虚拟仪器工程应用.2版.北京:中国铁道出版社,2012.
[10]邱迎峰.基于LabVIEW 的任意波形发生器编程与控制.计算机工程与设计,2006(12):18-22.