基于核距离加权的k-最近邻红外小目标检测
2014-03-20陈晓斯程正东
陈晓斯,程正东,樊 祥,朱 斌,丁 磊
(1.电子工程学院脉冲功率激光技术国家重点实验室,安徽合肥230037;2.中国电子科技集团公司第十六所信息档案部,安徽合肥230037)
1 引言
城市错综复杂的辐射环境,包括大气尘埃、气溶胶以及城市中建筑、树木边缘和飞鸟等带来的非线性信号往往影响着红外搜索跟踪系统(IRST)的作战性能,易导致其虚警率较高。
目前,针对IRST系统的研究主要集中在红外小目标的检测算法[1]。滤波是红外小目标检测的常用方法[2],代表方法包括最大中值滤波[3]、高通滤波[4]、形态学滤波[5]等,这类方法处理非线性问题效果不佳;另一种是基于分类思想,代表方法包括PCA[6]、SVM[7]。这类方法在建立数据库和训练过程上花费的时间过多。
将 k-最近邻(k-Nearest Neighbor,k-NN)思想用于单帧预测,可视为滤波与分类思想的结合,其预测前无需对样本数据进行训练,引入了最近邻判别决策,通过对预测窗口进行分类计算得到预测结果。但在实验过程中遇到了两个问题。一是若所选预测点的个数远大于实际近邻数,则所预测的数值将与实际值相差甚远,偏倚过高。二是城市环境下所拍摄的红外图像表现出明显的非线性、非平稳分布特征使得算法的性能不理想。
本文首先对k-NN算法进行距离加权改进,然后引入核方法,提出了一种基于核距离加权的k-最近邻红外小目标检测算法,实验表明,该算法有很好的滤波性能,适用于低信噪比情况下的小目标检测。
2 k-最近邻背景预测算法滤波器
传统的k-最近邻法的基本定义[8]为:使用训练集Γ在输入空间中最邻近x的观测值形成f^(x),表示为:其中,k表示最近邻个数;xi表示k个近邻中第i个近邻。因此,k-最近邻背景滤波器可以表示为:


式中,N(x0)是x0的邻域,f^(m,n)为(m,n)点的预测背景灰度值;x(m-s,n-t)为原始图像预测窗口内与中心点灰度值邻近的像素灰度值;w为权值大小,为1/k,相当于对和求平均;s,t表示预测窗内的像素坐标;Ns,Nt为预测窗口的范围。3 基于核距离加权的k-最近邻滤波器3.1 k-最近邻算法的距离加权改进
对k-最近邻算法进行改进,即对k个近邻的贡献加权。根据它们相对目标点x0的距离,将较大的权值赋给较近的近邻。式(1)改写为:

其中,xi表示查询点x附近的第i个数值。求和的目的是为了将不同权值的贡献归一化。为了得到可接受的权值,首先从随机的权值开始,需要指定一个度量标准来衡量假设相对于训练样例的训练误差(training error)。本文使用一种常用的度量标准:

其中,D是训练样例集合;f(x)是训练样例的目标输出;^f(xi)是第i个近邻参与贡献后的输出。然后反复地应用这个感知器到每一个训练样例上,然后每一步根据感知器训练法则来修正权值,即根据误差不断修改与输入xi对应的权值wi,表示如下:

其中:

其中,η是一个正的常数,称为学习速率(learning rate),其决定梯度搜索的步长。
在有限次地使用训练法则后,上述训练过程会收敛到一个能正确分类所有训练样例的权向量,若数据不是线性可分,那么不能保证训练过程收敛。为了解决样例非线性可分时的情况,使用梯度下降来搜索可能的权向量的假设空间,以找到最佳拟合训练样例的权向量,其输出表示如下:

梯度下降搜索从一个任意的初始权向量开始,以很小的步伐繁复修改这个向量。每一步都沿着误差最陡峭的方向修改,继续这个过程直到得到全局的最小误差点。从式(4)中计算E的微分,从而得到这个梯度向量的分量,过程如下:


3 .2 基于核距离加权的k-最近邻滤波器
为了充分考虑复杂背景所带来的非线性影响,将k-最近邻算法作为核方法的载体函数,对距离加权wi进行了核变换,即将核函数作为一个距离函数,用它来决定每个训练样例的权值,表示为:

为了修改这个过程用于推导出局部逼近,下面根据不同的情况重新定义了误差准则E,用来着重于拟合局部训练样例。
(1)若考虑只对在k个最近邻上的误差平方最小化,式(4)表示为:

其中,xi表示训练样例i的一个输入分量。把式(8)代入式(6)便得到梯度下降权值更新法则:
(2)若考虑使整个训练样例集合D上的误差平方最小化,但对每个训练样例加权,权值为关于相距x距离的递减核函数κ(x,xi),式(4)表示为:
结合式(10)和式(11),可以得到:

因此,式(9)可以重新表示为:

式(13)和式(9)给出的法则之间的差异为:实例x对权值更新的贡献如今乘上了一个距离惩罚项κ(x,xi),并且仅对k个最近邻的训练实例的误差求和。目前常用的核函数如表1所示。
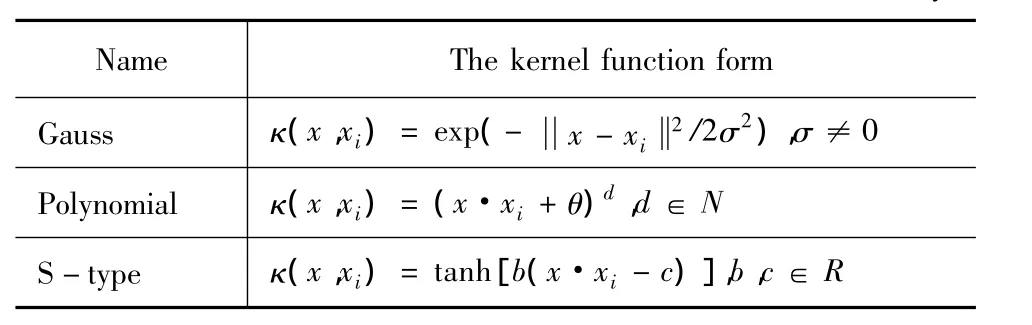
表1 几种常用的核函数Tab.1 the several kernel functions used commonly
4 实验设置及结果分析
4.1 算法实现
④计算权值训练梯度Δwi;
⑤更新权值并保存wi←wi+Δwi,i=i+1;
⑥若i≠k,重复步骤③~⑤;若i=k,将保存的 w1,w2,…,wk代入式(3),得到最后预测值。
遍历整幅图像,获得预测图像,而后进行目标提取检测,检测流程如图1所示。

图1 检测流程图Fig.1 Experimental flowchart
对于每一个预测窗口内的目标点,算法的权值更新步骤流程为:
①初始化权值w0,学习速率η,i=1;
②寻找目标点的k个近邻点;
③计算初始预测值f^(xi),训练误差E(wi);
4.2 实验参数选择
实验中选取20组以城市环境为背景拍摄(拍摄仪器:Thermal CAM PM595-1)的红外图像进行小目标提取,图像大小为320×240像素。实验条件:计算机主板为 CPU 2.33GHz,内存2GB。
为了检测算法性能的好坏,选取常用的三个标准进行评价:信噪比增益(GSNR),背景抑制因子(BSF)以及单帧运算时间(TPF/s),具体定义为:GSNR=SNRo/SNRi,SNR=S/N,其中 S 是目标区域灰度最大值,N是背景灰度均值;BSF=σin/σout,其中σin是原始图像的背景均方差,σout滤波残差图像的背景均方差。GSNR越大,表示算法提高图像信噪比的能力越强[9]。BSF是衡量算法背景抑制能力的重要参数,越大代表背景抑制能力越强。TPF越小说明算法运算效率越高。
参数设置为:预测窗口均使用5×5的矩形窗口;最近邻个数k=7;学习速率η=1;高斯核函数中不同σ的取值平均结果如表2所示,当σ≥50时,GSNR、BSF和 TPF趋于稳定,因此本文取σ=50。

表2 不同高斯核参数的实验平均结果Tab.2 the experimentalmean results of different Gauss kernel parameters
4.3 实验结果及分析
为了进一步验证算法性能,选取最大中值滤波(M-Med)、数学形态学滤波(Morphology)、k-最近邻滤波(k-NN)和基于核距离加权的k-最近邻(K k-NN)滤波四种算法进行实验效果对比。将四种算法的GSNR、BSF和TPF实验数据绘制成曲线,如图2所示。从图中可以看出,引入核方法后的k-最近邻算法即K k-NN算法的性能在GSNR和BSF上均有十分显著的提升,原因是核函数将数据从原始数据映射到高维空间中进行了分类,从而精确地确定了权值更新的步长,这一优点也使得算法在耗时上高于其余三种算法,不过仍可以满足实时性的要求。相比而言,k-NN算法、M-Med算法和Morphology算法虽然运算时间低于K k-NN算法,但GSNR和BSF都偏低。

图2 四种算法的GSNR、BSF和TPF曲线图Fig.2 Metric comparison of different detection methods
选取了三幅带有城市背景的红外图像,图3给出了四种算法的实验滤波结果,可以清楚地看到,M-Med算法和Morphology算法的滤波图像中的背景泄露十分严重,特别是背景边缘部分,如图3(d)、图3(e)所示;k-NN算法背景抑制效果较好,但滤波图像中目标几乎淹没在背景之中,这将影响后续的目标提取,如图3(f)所示;而K k-NN算法在较好抑制背景边缘的同时,仍能凸显目标信息,效果较好。

图3 四种算法的城市背景红外图像实验结果(a)原始图像;(b)K k-NN预测图像;(c)K k-NN滤波图像;(d)M-Med滤波图像;(e)Morphology滤波图像;(f)k-NN滤波图像Fig.3 Experimental results of K k-NN,k-NN,M -Med and Morphology algorithms(a)Original image;(b)K k-NN estimate background;(c)K k-NN filter result;(d)M-Med filter result;(e)Morphology filter result;(f)k-NN filter result
5 结束语
提出了一种基于核距离加权的k-最近邻(K k-NN)红外小目标检测算法,该算法通过引入最近邻判别决策,按距离大小进行加权改进,并结合核方法,得到了理想的预测图像。实验表明,该算法上在单帧检测算法中表现了较好的滤波性能。下一步,可通过引入稀疏以及核函数的优化来提高算法实时性。
[1] GUOWei,ZHAO Yigong,XIE Zhenhua,et al,New method for cloud description and dim small infrared target detection based on nonparametric statistics[J].J.Infrared Millim.Waves,2008,27(5):383 -387.(in Chinese)郭伟,赵亦工,谢振华,等.基于非参数统计的云层背景描述与红外弱小目标检测[J].红外与毫米波学报,2008,27(5):383 -387.[2] ZHAO Jiajia,TANG Zhengyuan,YANG Jie,et al.Infrared small target detection based on image sparse representation[J].J.Infrared Millim.Waves,2011,30(2):156 -161.(in Chinese)赵佳佳,唐峥远,杨杰,等.基于图像稀疏表示的红外小目标检测算法[J].红外与毫米波学报,2011,30(2):156-161.
[3] SD Deshpande,M H Er,R Venkateswarlu,and P Chan,Max-mean and max-median filters for detection of small targets[J].SPIE Signal and Data Processing of Small Targets,1999,3809:74 -83.
[4] L Yang,JYang,K Yang,Adaptive detection for infrared small target under sea - sky complex Background[J].E-lectron.Lett.,2004,40(17):1083 -1085.
[5] GUO Runqiu,ZHANG Ying,LIN Xiaochun.A new method of infrared dim small targets detection by morphology filtering[J].Laser & Infrared,2005,35(6):451 - 453.(in Chinese)过润秋,张颖,林晓春.基于形态学的红外小目标检测算法[J].激光与红外,2005,35(6):451 -453.
[6] HU Tun,ZHAO Jiajia,CAO Yuan,et al.Infrared small target detection based on saliency and principle component analysis[J].J.Infrared Millim.Waves,2010,29(4):303 -306.(in Chinese)胡暾,赵佳佳,曹原,等.基于显著性及主成分分析的红外小目标检测[J].红外与毫米波学报,2010,29(4):303-306.
[7] GUO Zhangting,XIN Yunhong.Small IR target detection algorithm based on classified background prediction and image blocking[J].Laser & Infrared,2012,42(5):573 -578.(in Chinese)郭张婷,辛云宏.红外小目标的分类背景预测与图像分块技术[J].激光与红外,2012,42(5):573 -578.
[8] Trevor Hastie,Robert Tibshirani,Jerome Friedman.The elements of statistical learning datamining,inference,and prediction[M].Beijing:Publishing House of Electronics Industy,2007.
[9] Alexander Tartakovsky,Rudolf Blazek.Effective adaptive spatial-temporal technique for clutter rejection in IRST[C].Proc.of SPIE,2000,4048:85-95.
